 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Simplex: Balancing Safety and Performance in Autonomous Cyber Physical Systems
Feb 20, 2023



Learning Enabled Components (LEC) have greatly assisted cyber-physical systems in achieving higher levels of autonomy. However, LEC's susceptibility to dynamic and uncertain operating conditions is a critical challenge for the safety of these systems. Redundant controller architectures have been widely adopted for safety assurance in such contexts. These architectures augment LEC "performant" controllers that are difficult to verify with "safety" controllers and the decision logic to switch between them. While these architectures ensure safety, we point out two limitations. First, they are trained offline to learn a conservative policy of always selecting a controller that maintains the system's safety, which limits the system's adaptability to dynamic and non-stationary environments. Second, they do not support reverse switching from the safety controller to the performant controller, even when the threat to safety is no longer present. To address these limitations, we propose a dynamic simplex strategy with an online controller switching logic that allows two-way switching. We consider switching as a sequential decision-making problem and model it as a semi-Markov decision process. We leverage a combination of a myopic selector using surrogate models (for the forward switch) and a non-myopic planner (for the reverse switch) to balance safety and performance. We evaluate this approach using an autonomous vehicle case study in the CARLA simulator using different driving conditions, locations, and component failures. We show that the proposed approach results in fewer collisions and higher performance than state-of-the-art alternatives.
Risk-Aware Scene Sampling for Dynamic Assurance of Autonomous Systems
Feb 28, 2022
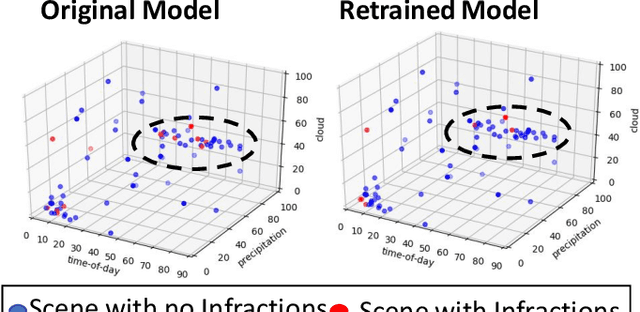
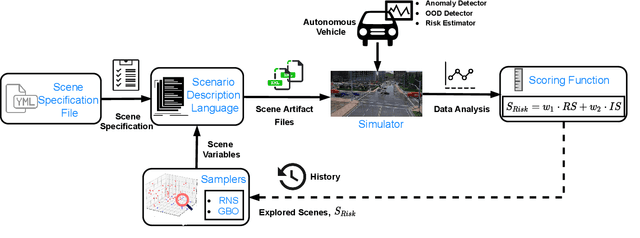
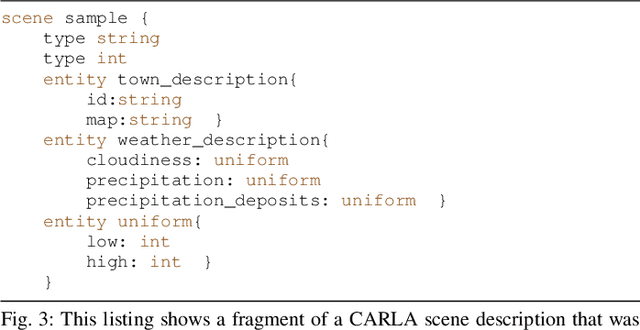
Autonomous Cyber-Physical Systems must often operate under uncertainties like sensor degradation and shifts in the operating conditions, which increases its operational risk. Dynamic Assurance of these systems requires designing runtime safety components like Out-of-Distribution detectors and risk estimators, which require labeled data from different operating modes of the system that belong to scenes with adverse operating conditions, sensors, and actuator faults. Collecting real-world data of these scenes can be expensive and sometimes not feasible. So, scenario description languages with samplers like random and grid search are available to generate synthetic data from simulators, replicating these real-world scenes. However, we point out three limitations in using these conventional samplers. First, they are passive samplers, which do not use the feedback of previous results in the sampling process. Second, the variables to be sampled may have constraints that are often not included. Third, they do not balance the tradeoff between exploration and exploitation, which we hypothesize is necessary for better search space coverage. We present a scene generation approach with two samplers called Random Neighborhood Search (RNS) and Guided Bayesian Optimization (GBO), which extend the conventional random search and Bayesian Optimization search to include the limitations. Also, to facilitate the samplers, we use a risk-based metric that evaluates how risky the scene was for the system. We demonstrate our approach using an Autonomous Vehicle example in CARLA simulation. To evaluate our samplers, we compared them against the baselines of random search, grid search, and Halton sequence search. Our samplers of RNS and GBO sampled a higher percentage of high-risk scenes of 83% and 92%, compared to 56%, 66% and 71% of the grid, random and Halton samplers, respectively.
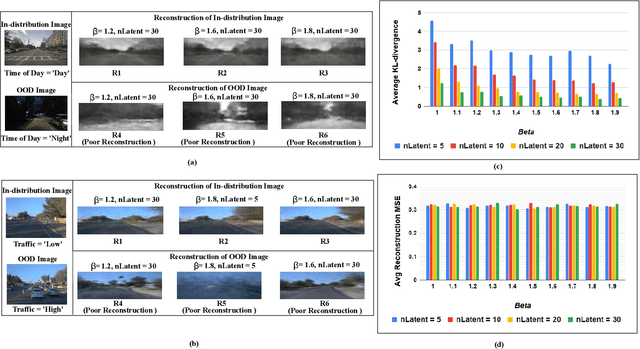
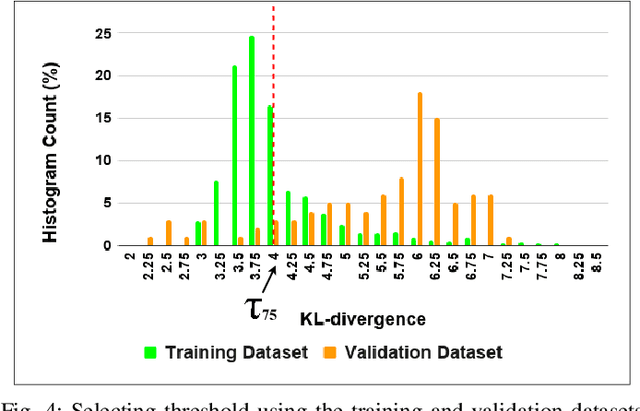
Efficient Out-of-Distribution Detection Using Latent Space of $β$-VAE for Cyber-Physical Systems
Aug 26, 2021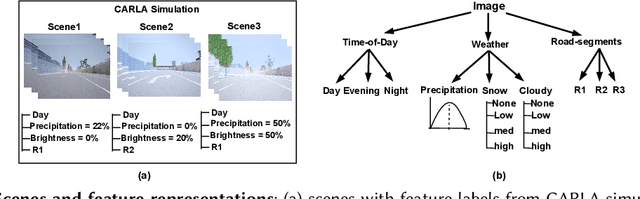

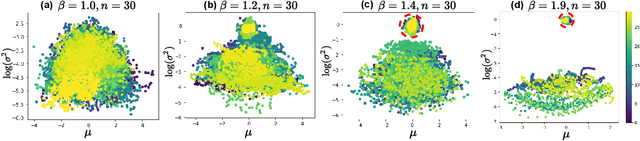
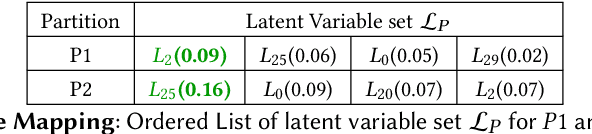
Deep Neural Networks are actively being used in the design of autonomous Cyber-Physical Systems (CPSs). The advantage of these models is their ability to handle high-dimensional state-space and learn compact surrogate representations of the operational state spaces. However, the problem is that the sampled observations used for training the model may never cover the entire state space of the physical environment, and as a result, the system will likely operate in conditions that do not belong to the training distribution. These conditions that do not belong to training distribution are referred to as Out-of-Distribution (OOD). Detecting OOD conditions at runtime is critical for the safety of CPS. In addition, it is also desirable to identify the context or the feature(s) that are the source of OOD to select an appropriate control action to mitigate the consequences that may arise because of the OOD condition. In this paper, we study this problem as a multi-labeled time series OOD detection problem over images, where the OOD is defined both sequentially across short time windows (change points) as well as across the training data distribution. A common approach to solving this problem is the use of multi-chained one-class classifiers. However, this approach is expensive for CPSs that have limited computational resources and require short inference times. Our contribution is an approach to design and train a single $\beta$-Variational Autoencoder detector with a partially disentangled latent space sensitive to variations in image features. We use the feature sensitive latent variables in the latent space to detect OOD images and identify the most likely feature(s) responsible for the OOD. We demonstrate our approach using an Autonomous Vehicle in the CARLA simulator and a real-world automotive dataset called nuImages.
Deep-RBF Networks for Anomaly Detection in Automotive Cyber-Physical Systems
Mar 25, 2021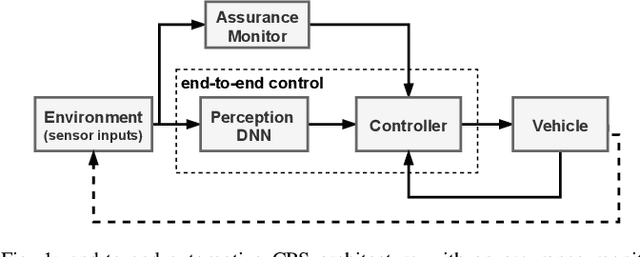
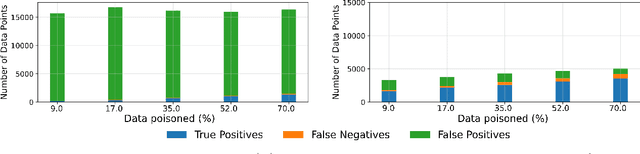
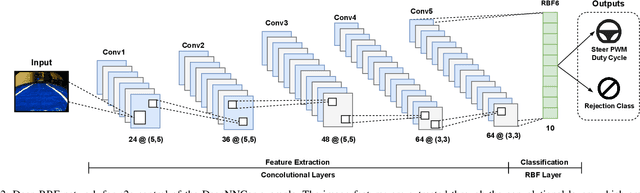
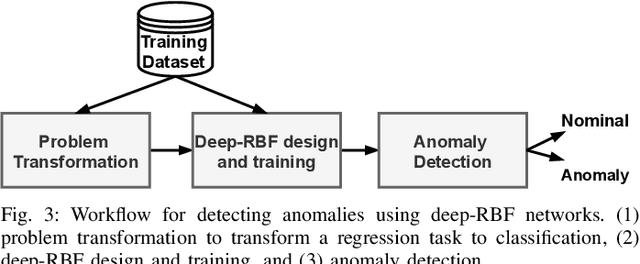
Deep Neural Networks (DNNs) are popularly used for implementing autonomy related tasks in automotive Cyber-Physical Systems (CPSs). However, these networks have been shown to make erroneous predictions to anomalous inputs, which manifests either due to Out-of-Distribution (OOD) data or adversarial attacks. To detect these anomalies, a separate DNN called assurance monitor is often trained and used in parallel to the controller DNN, increasing the resource burden and latency. We hypothesize that a single network that can perform controller predictions and anomaly detection is necessary to reduce the resource requirements. Deep-Radial Basis Function (RBF) networks provide a rejection class alongside the class predictions, which can be utilized for detecting anomalies at runtime. However, the use of RBF activation functions limits the applicability of these networks to only classification tasks. In this paper, we show how the deep-RBF network can be used for detecting anomalies in CPS regression tasks such as continuous steering predictions. Further, we design deep-RBF networks using popular DNNs such as NVIDIA DAVE-II, and ResNet20, and then use the resulting rejection class for detecting adversarial attacks such as a physical attack and data poison attack. Finally, we evaluate these attacks and the trained deep-RBF networks using a hardware CPS testbed called DeepNNCar and a real-world German Traffic Sign Benchmark (GTSB) dataset. Our results show that the deep-RBF networks can robustly detect these attacks in a short time without additional resource requirements.
ReSonAte: A Runtime Risk Assessment Framework for Autonomous Systems
Feb 18, 2021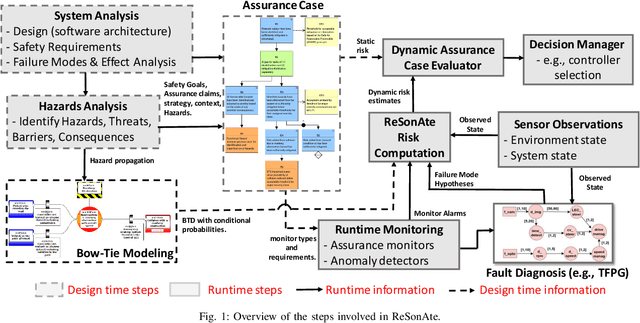
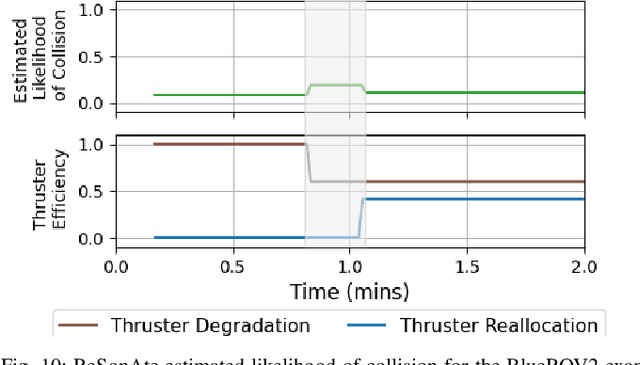
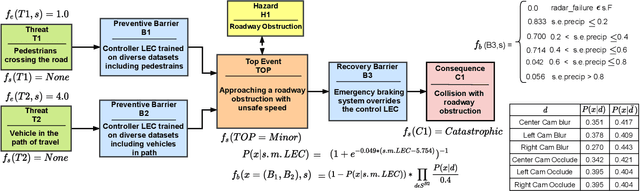
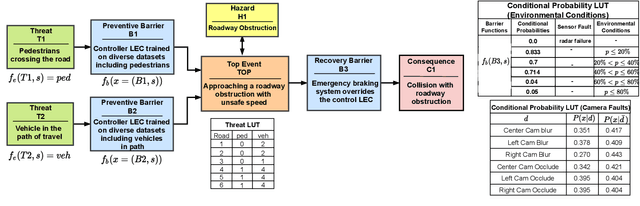
Autonomous CPSs are often required to handle uncertainties and self-manage the system operation in response to problems and increasing risk in the operating paradigm. This risk may arise due to distribution shifts, environmental context, or failure of software or hardware components. Traditional techniques for risk assessment focus on design-time techniques such as hazard analysis, risk reduction, and assurance cases among others. However, these static, design-time techniques do not consider the dynamic contexts and failures the systems face at runtime. We hypothesize that this requires a dynamic assurance approach that computes the likelihood of unsafe conditions or system failures considering the safety requirements, assumptions made at design time, past failures in a given operating context, and the likelihood of system component failures. We introduce the ReSonAte dynamic risk estimation framework for autonomous systems. ReSonAte reasons over Bow-Tie Diagrams (BTDs) which capture information about hazard propagation paths and control strategies. Our innovation is the extension of the BTD formalism with attributes for modeling the conditional relationships with the state of the system and environment. We also describe a technique for estimating these conditional relationships and equations for estimating risk based on the state of the system and environment. To help with this process, we provide a scenario modeling procedure that can use the prior distributions of the scenes and threat conditions to generate the data required for estimating the conditional relationships. To improve scalability and reduce the amount of data required, this process considers each control strategy in isolation and composes several single-variate distributions into one complete multi-variate distribution for the control strategy in question.
A Methodology for Automating Assurance Case Generation
Mar 11, 2020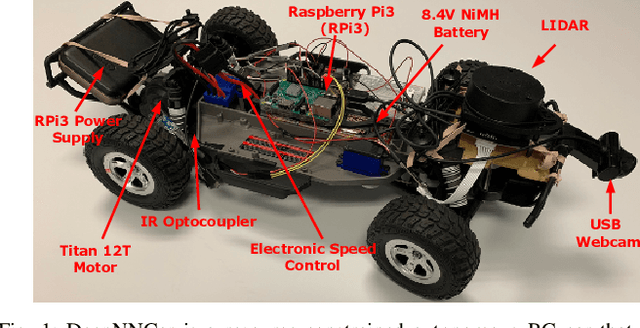
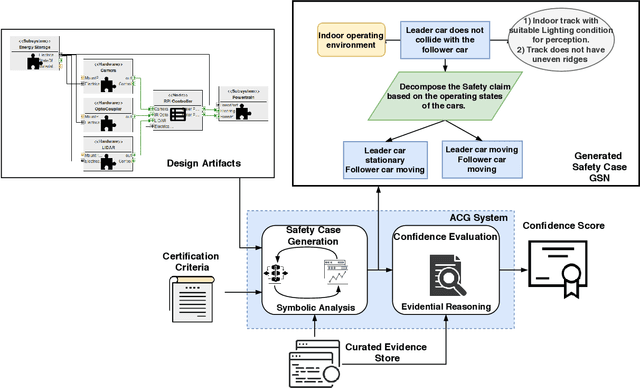

Safety Case has become an integral component for safety-certification in various Cyber Physical System domains including automotive, aviation, medical devices, and military. The certification processes for these systems are stringent and require robust safety assurance arguments and substantial evidence backing. Despite the strict requirements, current practices still rely on manual methods that are brittle, do not have a systematic approach or thorough consideration of sound arguments. In addition, stringent certification requirements and ever-increasing system complexity make ad-hoc, manual assurance case generation (ACG) inefficient, time consuming, and expensive. To improve the current state of practice, we introduce a structured ACG tool which uses system design artifacts, accumulated evidence, and developer expertise to construct a safety case and evaluate it in an automated manner. We also illustrate the applicability of the ACG tool on a remote-control car testbed case study.
Out-of-Distribution Detection in Multi-Label Datasets using Latent Space of $β$-VAE
Mar 10, 2020
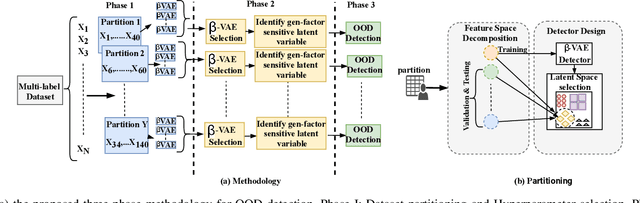
Learning Enabled Components (LECs) are widely being used in a variety of perception based autonomy tasks like image segmentation, object detection, end-to-end driving, etc. These components are trained with large image datasets with multimodal factors like weather conditions, time-of-day, traffic-density, etc. The LECs learn from these factors during training, and while testing if there is variation in any of these factors, the components get confused resulting in low confidence predictions. The images with factors not seen during training is commonly referred to as Out-of-Distribution (OOD). For safe autonomy it is important to identify the OOD images, so that a suitable mitigation strategy can be performed. Classical one-class classifiers like SVM and SVDD are used to perform OOD detection. However, the multiple labels attached to the images in these datasets, restricts the direct application of these techniques. We address this problem using the latent space of the $\beta$-Variational Autoencoder ($\beta$-VAE). We use the fact that compact latent space generated by an appropriately selected $\beta$-VAE will encode the information about these factors in a few latent variables, and that can be used for computationally inexpensive detection. We evaluate our approach on the nuScenes dataset, and our results shows the latent space of $\beta$-VAE is sensitive to encode changes in the values of the generative factor.
Augmenting Learning Components for Safety in Resource Constrained Autonomous Robots
Apr 04, 2019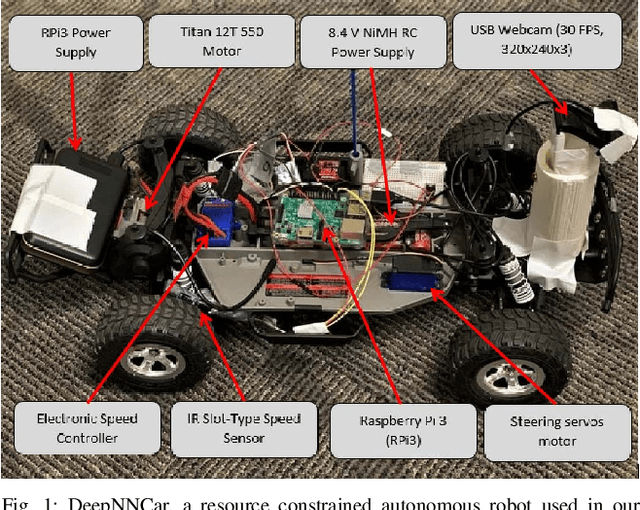
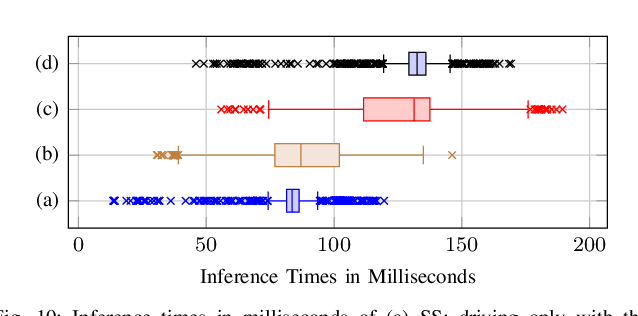
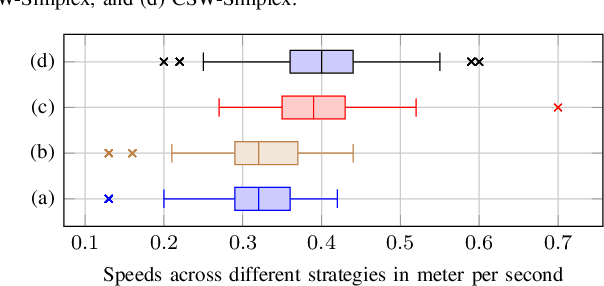
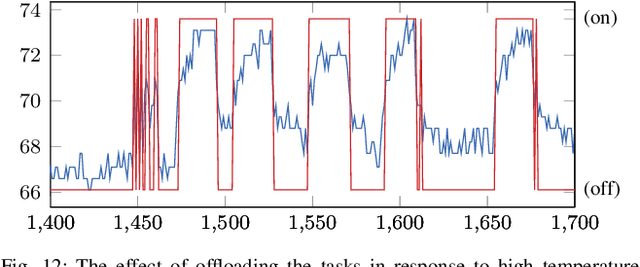
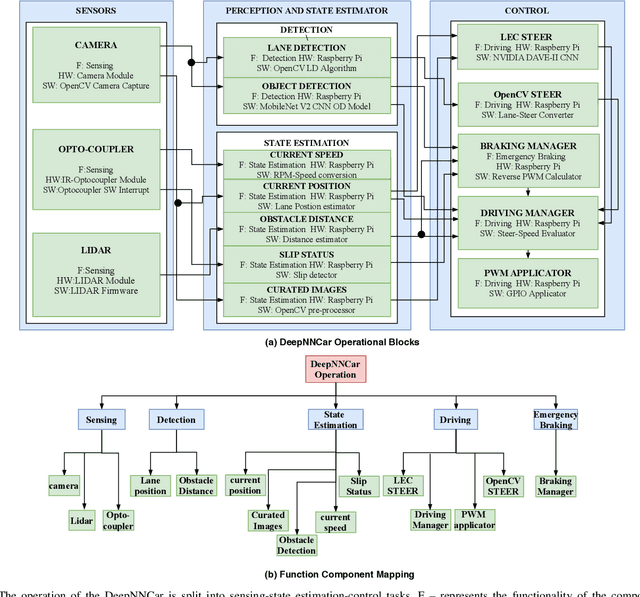
Learning enabled components (LECs) trained using data-driven algorithms are increasingly being used in autonomous robots commonly found in factories, hospitals, and educational laboratories. However, these LECs do not provide any safety guarantees, and testing them is challenging. In this paper, we introduce a framework that performs weighted simplex strategy based supervised safety control, resource management and confidence estimation of autonomous robots. Specifically, we describe two weighted simplex strategies: (a) simple weighted simplex strategy (SW-Simplex) that computes a weighted controller output by comparing the decisions between a safety supervisor and an LEC, and (b) a context-sensitive weighted simplex strategy (CSW-Simplex) that computes a context-aware weighted controller output. We use reinforcement learning to learn the contextual weights. We also introduce a system monitor that uses the current state information and a Bayesian network model learned from past data to estimate the probability of the robotic system staying in the safe working region. To aid resource constrained robots in performing complex computations of these weighted simplex strategies, we describe a resource manager that offloads tasks to an available fog nodes. The paper also describes a hardware testbed called DeepNNCar, which is a low cost resource-constrained RC car, built to perform autonomous driving. Using the hardware, we show that both SW-Simplex and CSW-Simplex have 40\% and 60\% fewer safety violations, while demonstrating higher optimized speed during indoor driving \textbf{($\sim\,0.40\,m/s$)} than the original system (using only LECs).