 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReSonAte: A Runtime Risk Assessment Framework for Autonomous Systems
Feb 18, 2021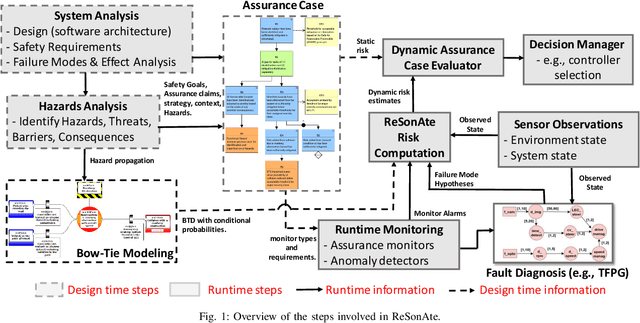
Autonomous CPSs are often required to handle uncertainties and self-manage the system operation in response to problems and increasing risk in the operating paradigm. This risk may arise due to distribution shifts, environmental context, or failure of software or hardware components. Traditional techniques for risk assessment focus on design-time techniques such as hazard analysis, risk reduction, and assurance cases among others. However, these static, design-time techniques do not consider the dynamic contexts and failures the systems face at runtime. We hypothesize that this requires a dynamic assurance approach that computes the likelihood of unsafe conditions or system failures considering the safety requirements, assumptions made at design time, past failures in a given operating context, and the likelihood of system component failures. We introduce the ReSonAte dynamic risk estimation framework for autonomous systems. ReSonAte reasons over Bow-Tie Diagrams (BTDs) which capture information about hazard propagation paths and control strategies. Our innovation is the extension of the BTD formalism with attributes for modeling the conditional relationships with the state of the system and environment. We also describe a technique for estimating these conditional relationships and equations for estimating risk based on the state of the system and environment. To help with this process, we provide a scenario modeling procedure that can use the prior distributions of the scenes and threat conditions to generate the data required for estimating the conditional relationships. To improve scalability and reduce the amount of data required, this process considers each control strategy in isolation and composes several single-variate distributions into one complete multi-variate distribution for the control strategy in question.
Workflow Automation for Cyber Physical System Development Processes
Apr 12, 2020


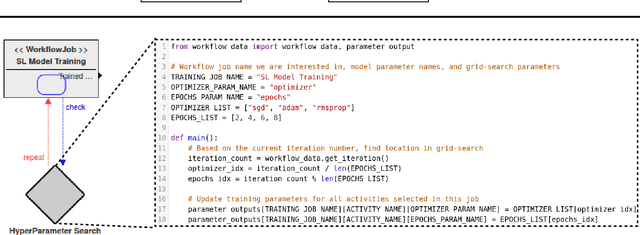
Development of Cyber Physical Systems (CPSs) requires close interaction between developers with expertise in many domains to achieve ever-increasing demands for improved performance, reduced cost, and more system autonomy. Each engineering discipline commonly relies on domain-specific modeling languages, and analysis and execution of these models is often automated with appropriate tooling. However, integration between these heterogeneous models and tools is often lacking, and most of the burden for inter-operation of these tools is placed on system developers. To address this problem, we introduce a workflow modeling language for the automation of complex CPS development processes and implement a platform for execution of these models in the Assurance-based Learning-enabled CPS (ALC) Toolchain. Several illustrative examples are provided which show how these workflow models are able to automate many time-consuming integration tasks previously performed manually by system developers.
A Methodology for Automating Assurance Case Generation
Mar 11, 2020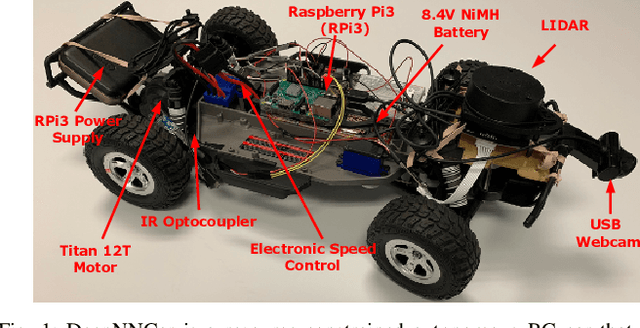
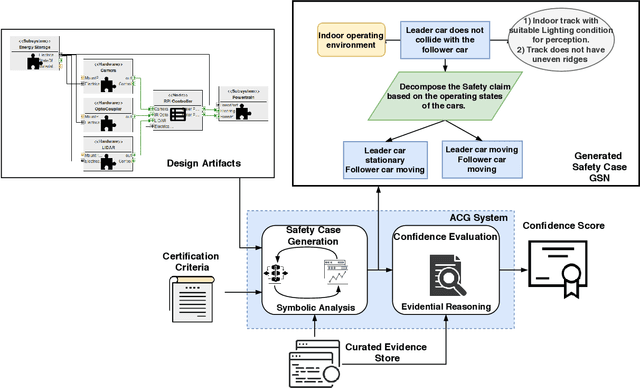

Safety Case has become an integral component for safety-certification in various Cyber Physical System domains including automotive, aviation, medical devices, and military. The certification processes for these systems are stringent and require robust safety assurance arguments and substantial evidence backing. Despite the strict requirements, current practices still rely on manual methods that are brittle, do not have a systematic approach or thorough consideration of sound arguments. In addition, stringent certification requirements and ever-increasing system complexity make ad-hoc, manual assurance case generation (ACG) inefficient, time consuming, and expensive. To improve the current state of practice, we introduce a structured ACG tool which uses system design artifacts, accumulated evidence, and developer expertise to construct a safety case and evaluate it in an automated manner. We also illustrate the applicability of the ACG tool on a remote-control car testbed case study.
Augmenting Learning Components for Safety in Resource Constrained Autonomous Robots
Apr 04, 2019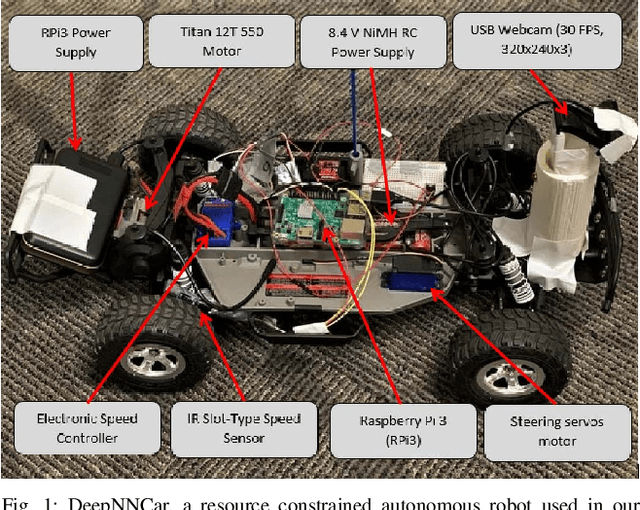
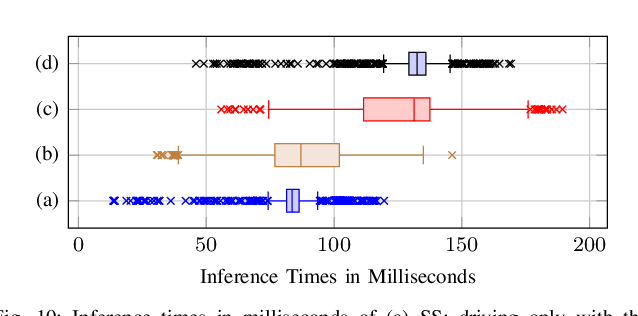
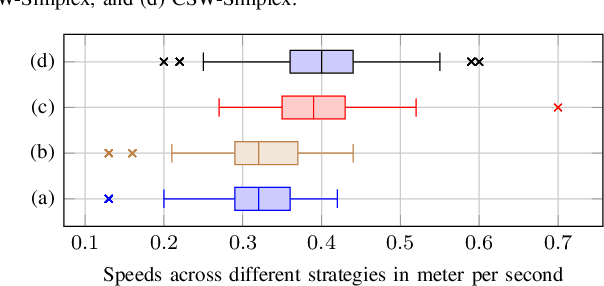
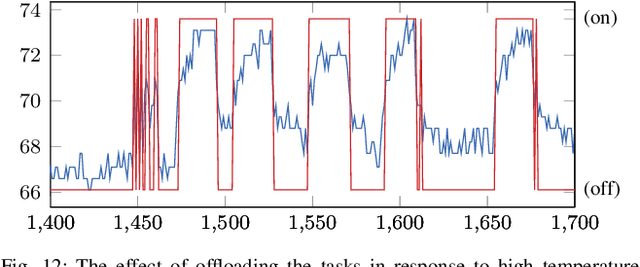
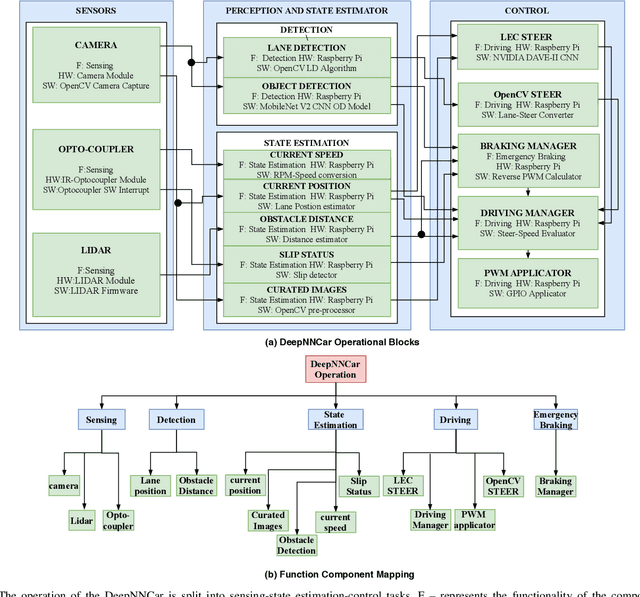
Learning enabled components (LECs) trained using data-driven algorithms are increasingly being used in autonomous robots commonly found in factories, hospitals, and educational laboratories. However, these LECs do not provide any safety guarantees, and testing them is challenging. In this paper, we introduce a framework that performs weighted simplex strategy based supervised safety control, resource management and confidence estimation of autonomous robots. Specifically, we describe two weighted simplex strategies: (a) simple weighted simplex strategy (SW-Simplex) that computes a weighted controller output by comparing the decisions between a safety supervisor and an LEC, and (b) a context-sensitive weighted simplex strategy (CSW-Simplex) that computes a context-aware weighted controller output. We use reinforcement learning to learn the contextual weights. We also introduce a system monitor that uses the current state information and a Bayesian network model learned from past data to estimate the probability of the robotic system staying in the safe working region. To aid resource constrained robots in performing complex computations of these weighted simplex strategies, we describe a resource manager that offloads tasks to an available fog nodes. The paper also describes a hardware testbed called DeepNNCar, which is a low cost resource-constrained RC car, built to perform autonomous driving. Using the hardware, we show that both SW-Simplex and CSW-Simplex have 40\% and 60\% fewer safety violations, while demonstrating higher optimized speed during indoor driving \textbf{($\sim\,0.40\,m/s$)} than the original system (using only LECs).