 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShrinking POMCP: A Framework for Real-Time UAV Search and Rescue
Nov 20, 2024



Efficient path optimization for drones in search and rescue operations faces challenges, including limited visibility, time constraints, and complex information gathering in urban environments. We present a comprehensive approach to optimize UAV-based search and rescue operations in neighborhood areas, utilizing both a 3D AirSim-ROS2 simulator and a 2D simulator. The path planning problem is formulated as a partially observable Markov decision process (POMDP), and we propose a novel ``Shrinking POMCP'' approach to address time constraints. In the AirSim environment, we integrate our approach with a probabilistic world model for belief maintenance and a neurosymbolic navigator for obstacle avoidance. The 2D simulator employs surrogate ROS2 nodes with equivalent functionality. We compare trajectories generated by different approaches in the 2D simulator and evaluate performance across various belief types in the 3D AirSim-ROS simulator. Experimental results from both simulators demonstrate that our proposed shrinking POMCP solution achieves significant improvements in search times compared to alternative methods, showcasing its potential for enhancing the efficiency of UAV-assisted search and rescue operations.
ReSonAte: A Runtime Risk Assessment Framework for Autonomous Systems
Feb 18, 2021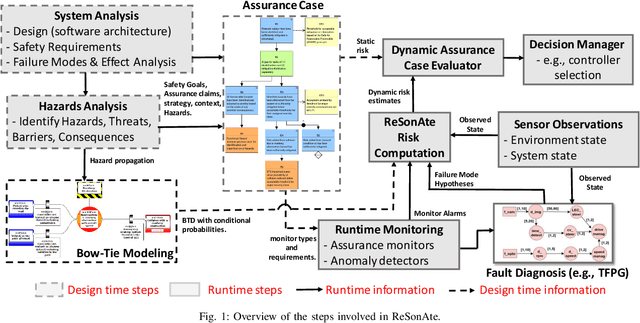
Autonomous CPSs are often required to handle uncertainties and self-manage the system operation in response to problems and increasing risk in the operating paradigm. This risk may arise due to distribution shifts, environmental context, or failure of software or hardware components. Traditional techniques for risk assessment focus on design-time techniques such as hazard analysis, risk reduction, and assurance cases among others. However, these static, design-time techniques do not consider the dynamic contexts and failures the systems face at runtime. We hypothesize that this requires a dynamic assurance approach that computes the likelihood of unsafe conditions or system failures considering the safety requirements, assumptions made at design time, past failures in a given operating context, and the likelihood of system component failures. We introduce the ReSonAte dynamic risk estimation framework for autonomous systems. ReSonAte reasons over Bow-Tie Diagrams (BTDs) which capture information about hazard propagation paths and control strategies. Our innovation is the extension of the BTD formalism with attributes for modeling the conditional relationships with the state of the system and environment. We also describe a technique for estimating these conditional relationships and equations for estimating risk based on the state of the system and environment. To help with this process, we provide a scenario modeling procedure that can use the prior distributions of the scenes and threat conditions to generate the data required for estimating the conditional relationships. To improve scalability and reduce the amount of data required, this process considers each control strategy in isolation and composes several single-variate distributions into one complete multi-variate distribution for the control strategy in question.