 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePoint-Identification of a Robust Predictor Under Latent Shift with Imperfect Proxies
Mar 16, 2026Addressing the domain adaptation problem becomes more challenging when distribution shifts across domains stem from latent confounders that affect both covariates and outcomes. Existing proxy-based approaches that address latent shift rely on a strong completeness assumption to uniquely determine (point-identify) a robust predictor. Completeness requires that proxies have sufficient information about variations in latent confounders. For imperfect proxies the mapping from confounders to the space of proxy distributions is non-injective, and multiple latent confounder values can generate the same proxy distribution. This breaks the completeness assumption and observed data are consistent with multiple potential predictors (set-identified). To address this, we introduce latent equivalent classes (LECs). LECs are defined as groups of latent confounders that induce the same conditional proxy distribution. We show that point-identification for the robust predictor remains achievable as long as multiple domains differ sufficiently in how they mix proxy-induced LECs to form the robust predictor. This domain diversity condition is formalized as a cross-domain rank condition on the mixture weights, which is substantially weaker assumption than completeness. We introduce the Proximal Quasi-Bayesian Active learning (PQAL) framework, which actively queries a minimal set of diverse domains that satisfy this rank condition. PQAL can efficiently recover the point-identified predictor, demonstrates robustness to varying degrees of shift and outperforms previous methods on synthetic data and semi-synthetic dSprites dataset.
Disentangled and Distilled Encoder for Out-of-Distribution Reasoning with Rademacher Guarantees
Dec 11, 2025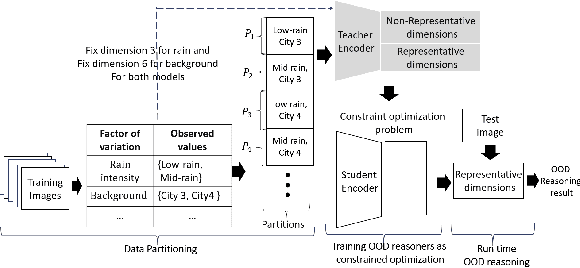
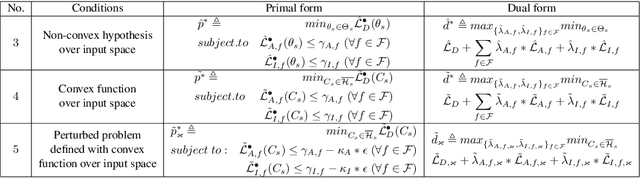
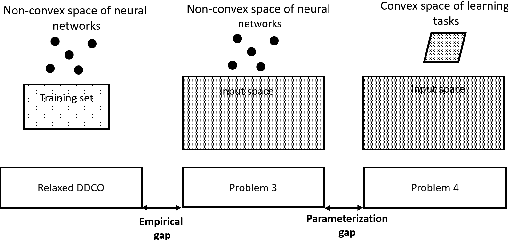
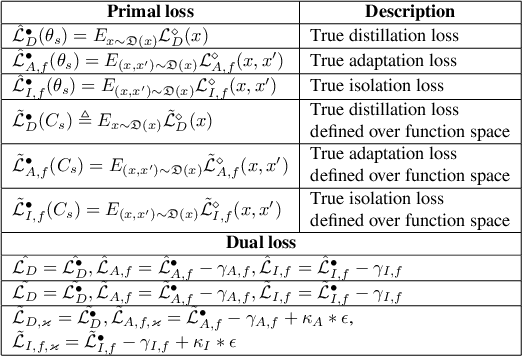
Recently, the disentangled latent space of a variational autoencoder (VAE) has been used to reason about multi-label out-of-distribution (OOD) test samples that are derived from different distributions than training samples. Disentangled latent space means having one-to-many maps between latent dimensions and generative factors or important characteristics of an image. This paper proposes a disentangled distilled encoder (DDE) framework to decrease the OOD reasoner size for deployment on resource-constrained devices while preserving disentanglement. DDE formalizes student-teacher distillation for model compression as a constrained optimization problem while preserving disentanglement with disentanglement constraints. Theoretical guarantees for disentanglement during distillation based on Rademacher complexity are established. The approach is evaluated empirically by deploying the compressed model on an NVIDIA
Out of Distribution Reasoning by Weakly-Supervised Disentangled Logic Variational Autoencoder
Oct 18, 2022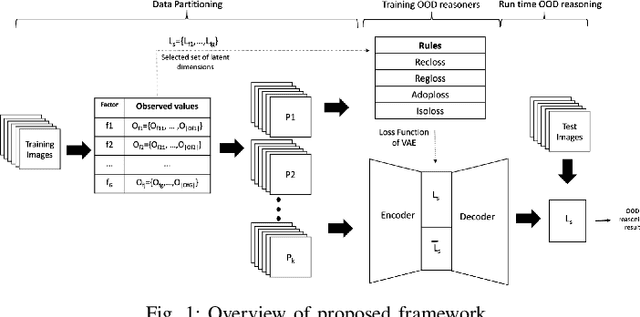
Out-of-distribution (OOD) detection, i.e., finding test samples derived from a different distribution than the training set, as well as reasoning about such samples (OOD reasoning), are necessary to ensure the safety of results generated by machine learning models. Recently there have been promising results for OOD detection in the latent space of variational autoencoders (VAEs). However, without disentanglement, VAEs cannot perform OOD reasoning. Disentanglement ensures a one- to-many mapping between generative factors of OOD (e.g., rain in image data) and the latent variables to which they are encoded. Although previous literature has focused on weakly-supervised disentanglement on simple datasets with known and independent generative factors. In practice, achieving full disentanglement through weak supervision is impossible for complex datasets, such as Carla, with unknown and abstract generative factors. As a result, we propose an OOD reasoning framework that learns a partially disentangled VAE to reason about complex datasets. Our framework consists of three steps: partitioning data based on observed generative factors, training a VAE as a logic tensor network that satisfies disentanglement rules, and run-time OOD reasoning. We evaluate our approach on the Carla dataset and compare the results against three state-of-the-art methods. We found that our framework outperformed these methods in terms of disentanglement and end-to-end OOD reasoning.
Efficient Out-of-Distribution Detection Using Latent Space of $β$-VAE for Cyber-Physical Systems
Aug 26, 2021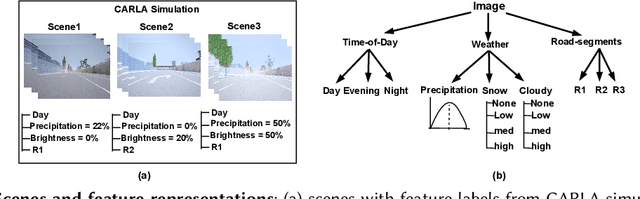

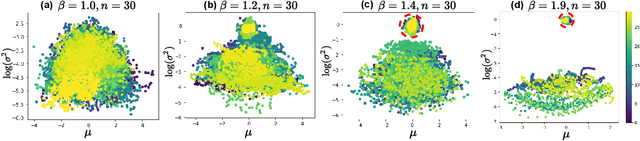
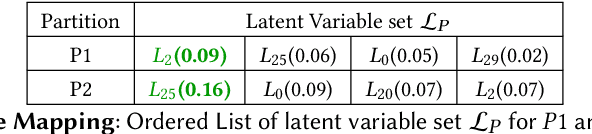
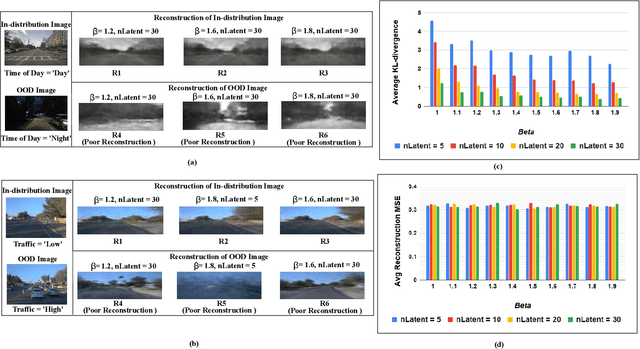
Deep Neural Networks are actively being used in the design of autonomous Cyber-Physical Systems (CPSs). The advantage of these models is their ability to handle high-dimensional state-space and learn compact surrogate representations of the operational state spaces. However, the problem is that the sampled observations used for training the model may never cover the entire state space of the physical environment, and as a result, the system will likely operate in conditions that do not belong to the training distribution. These conditions that do not belong to training distribution are referred to as Out-of-Distribution (OOD). Detecting OOD conditions at runtime is critical for the safety of CPS. In addition, it is also desirable to identify the context or the feature(s) that are the source of OOD to select an appropriate control action to mitigate the consequences that may arise because of the OOD condition. In this paper, we study this problem as a multi-labeled time series OOD detection problem over images, where the OOD is defined both sequentially across short time windows (change points) as well as across the training data distribution. A common approach to solving this problem is the use of multi-chained one-class classifiers. However, this approach is expensive for CPSs that have limited computational resources and require short inference times. Our contribution is an approach to design and train a single $\beta$-Variational Autoencoder detector with a partially disentangled latent space sensitive to variations in image features. We use the feature sensitive latent variables in the latent space to detect OOD images and identify the most likely feature(s) responsible for the OOD. We demonstrate our approach using an Autonomous Vehicle in the CARLA simulator and a real-world automotive dataset called nuImages.
Embedded out-of-distribution detection on an autonomous robot platform
Jun 30, 2021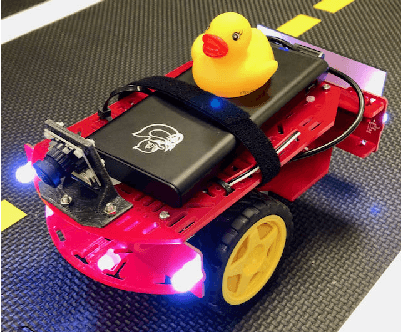
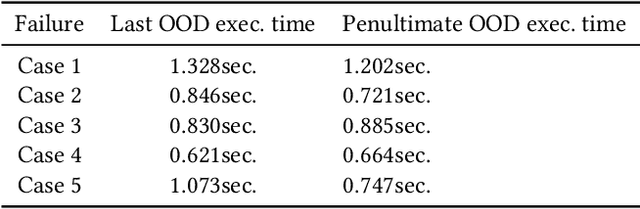
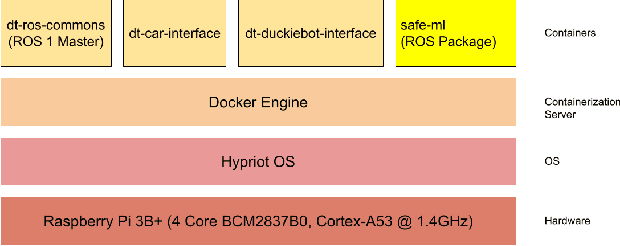
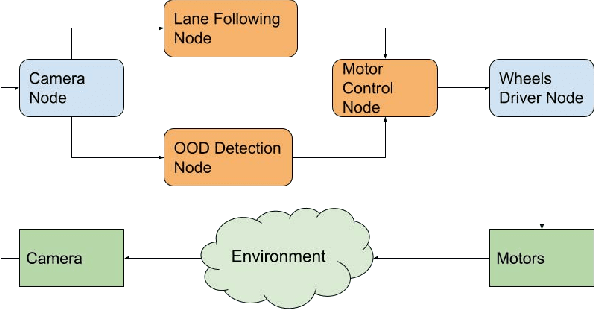
Machine learning (ML) is actively finding its way into modern cyber-physical systems (CPS), many of which are safety-critical real-time systems. It is well known that ML outputs are not reliable when testing data are novel with regards to model training and validation data, i.e., out-of-distribution (OOD) test data. We implement an unsupervised deep neural network-based OOD detector on a real-time embedded autonomous Duckiebot and evaluate detection performance. Our OOD detector produces a success rate of 87.5% for emergency stopping a Duckiebot on a braking test bed we designed. We also provide case analysis on computing resource challenges specific to the Robot Operating System (ROS) middleware on the Duckiebot.
* 6 pages, 8 figures
Out-of-Distribution Detection in Multi-Label Datasets using Latent Space of $β$-VAE
Mar 10, 2020
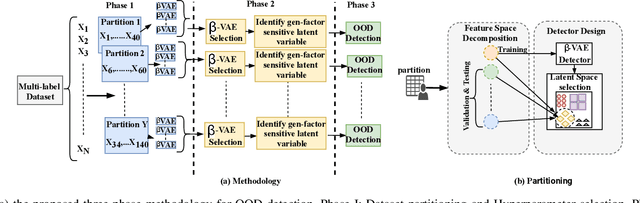
Learning Enabled Components (LECs) are widely being used in a variety of perception based autonomy tasks like image segmentation, object detection, end-to-end driving, etc. These components are trained with large image datasets with multimodal factors like weather conditions, time-of-day, traffic-density, etc. The LECs learn from these factors during training, and while testing if there is variation in any of these factors, the components get confused resulting in low confidence predictions. The images with factors not seen during training is commonly referred to as Out-of-Distribution (OOD). For safe autonomy it is important to identify the OOD images, so that a suitable mitigation strategy can be performed. Classical one-class classifiers like SVM and SVDD are used to perform OOD detection. However, the multiple labels attached to the images in these datasets, restricts the direct application of these techniques. We address this problem using the latent space of the $\beta$-Variational Autoencoder ($\beta$-VAE). We use the fact that compact latent space generated by an appropriately selected $\beta$-VAE will encode the information about these factors in a few latent variables, and that can be used for computationally inexpensive detection. We evaluate our approach on the nuScenes dataset, and our results shows the latent space of $\beta$-VAE is sensitive to encode changes in the values of the generative factor.