 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign Methodology for Deep Out-of-Distribution Detectors in Real-Time Cyber-Physical Systems
Jul 29, 2022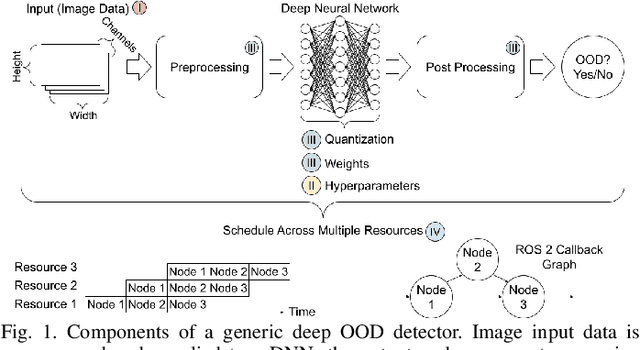
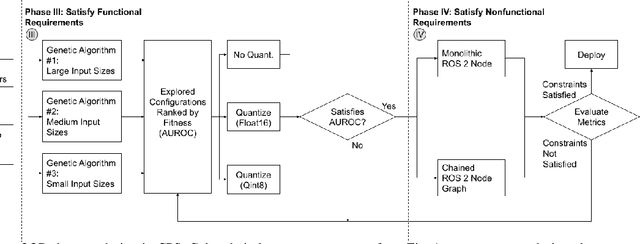
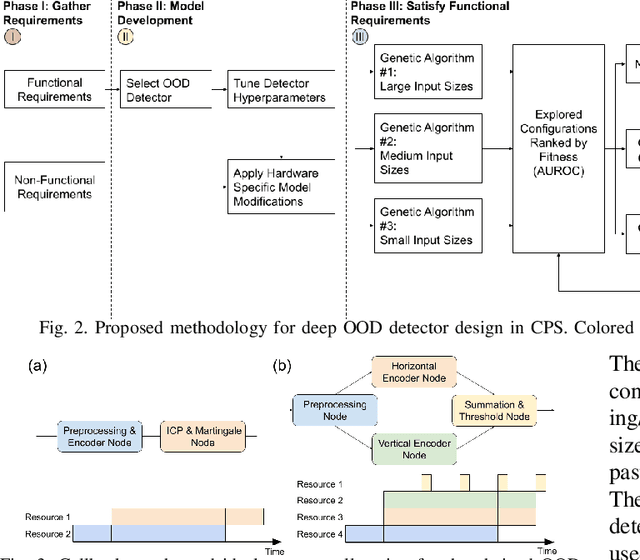
When machine learning (ML) models are supplied with data outside their training distribution, they are more likely to make inaccurate predictions; in a cyber-physical system (CPS), this could lead to catastrophic system failure. To mitigate this risk, an out-of-distribution (OOD) detector can run in parallel with an ML model and flag inputs that could lead to undesirable outcomes. Although OOD detectors have been well studied in terms of accuracy, there has been less focus on deployment to resource constrained CPSs. In this study, a design methodology is proposed to tune deep OOD detectors to meet the accuracy and response time requirements of embedded applications. The methodology uses genetic algorithms to optimize the detector's preprocessing pipeline and selects a quantization method that balances robustness and response time. It also identifies several candidate task graphs under the Robot Operating System (ROS) for deployment of the selected design. The methodology is demonstrated on two variational autoencoder based OOD detectors from the literature on two embedded platforms. Insights into the trade-offs that occur during the design process are provided, and it is shown that this design methodology can lead to a drastic reduction in response time in relation to an unoptimized OOD detector while maintaining comparable accuracy.
Improving Variational Autoencoder based Out-of-Distribution Detection for Embedded Real-time Applications
Jul 30, 2021
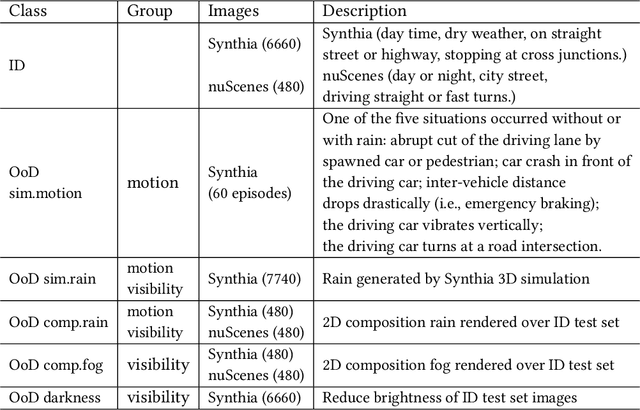
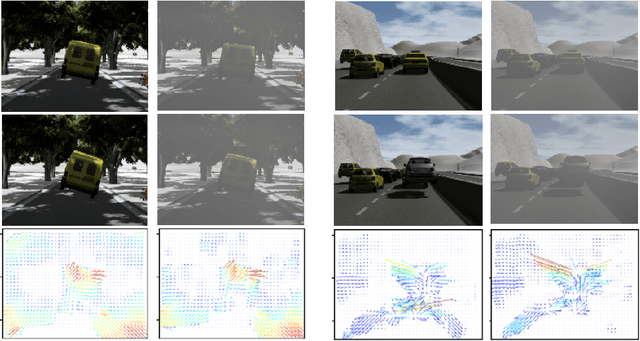
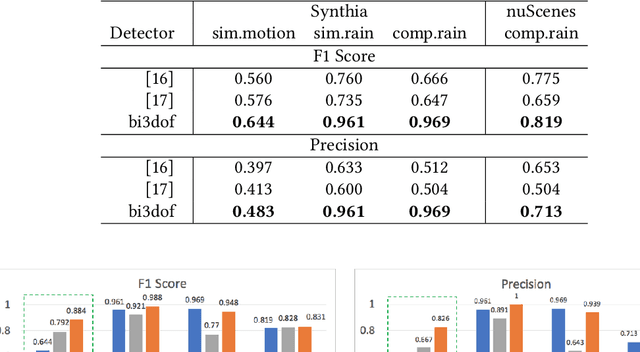
Uncertainties in machine learning are a significant roadblock for its application in safety-critical cyber-physical systems (CPS). One source of uncertainty arises from distribution shifts in the input data between training and test scenarios. Detecting such distribution shifts in real-time is an emerging approach to address the challenge. The high dimensional input space in CPS applications involving imaging adds extra difficulty to the task. Generative learning models are widely adopted for the task, namely out-of-distribution (OoD) detection. To improve the state-of-the-art, we studied existing proposals from both machine learning and CPS fields. In the latter, safety monitoring in real-time for autonomous driving agents has been a focus. Exploiting the spatiotemporal correlation of motion in videos, we can robustly detect hazardous motion around autonomous driving agents. Inspired by the latest advances in the Variational Autoencoder (VAE) theory and practice, we tapped into the prior knowledge in data to further boost OoD detection's robustness. Comparison studies over nuScenes and Synthia data sets show our methods significantly improve detection capabilities of OoD factors unique to driving scenarios, 42% better than state-of-the-art approaches. Our model also generalized near-perfectly, 97% better than the state-of-the-art across the real-world and simulation driving data sets experimented. Finally, we customized one proposed method into a twin-encoder model that can be deployed to resource limited embedded devices for real-time OoD detection. Its execution time was reduced over four times in low-precision 8-bit integer inference, while detection capability is comparable to its corresponding floating-point model.
Embedded out-of-distribution detection on an autonomous robot platform
Jun 30, 2021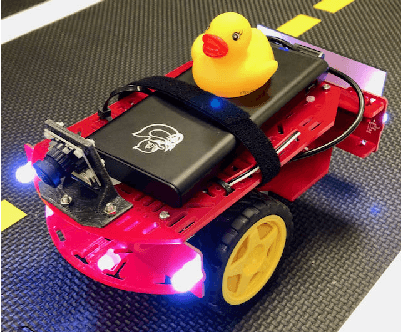
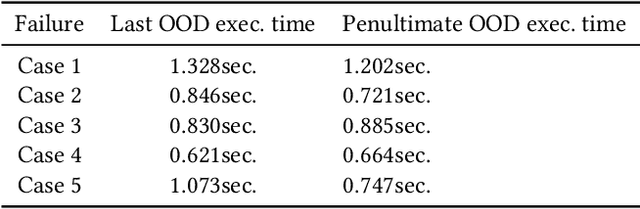
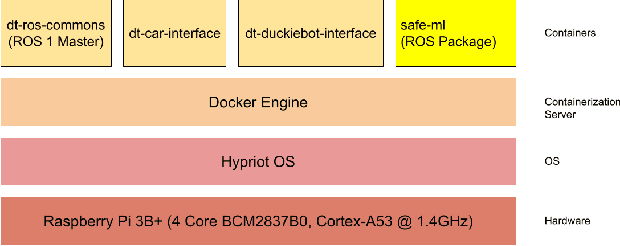
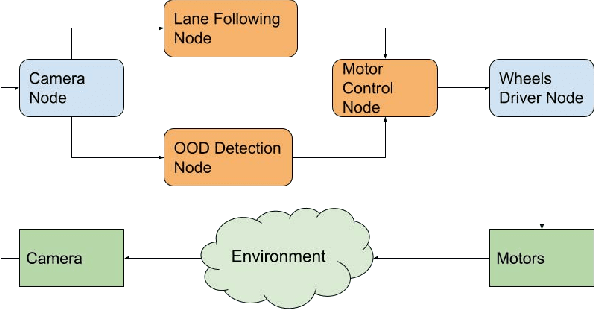
Machine learning (ML) is actively finding its way into modern cyber-physical systems (CPS), many of which are safety-critical real-time systems. It is well known that ML outputs are not reliable when testing data are novel with regards to model training and validation data, i.e., out-of-distribution (OOD) test data. We implement an unsupervised deep neural network-based OOD detector on a real-time embedded autonomous Duckiebot and evaluate detection performance. Our OOD detector produces a success rate of 87.5% for emergency stopping a Duckiebot on a braking test bed we designed. We also provide case analysis on computing resource challenges specific to the Robot Operating System (ROS) middleware on the Duckiebot.
* 6 pages, 8 figures