Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEmbedded out-of-distribution detection on an autonomous robot platform
Paper and Code
Jun 30, 2021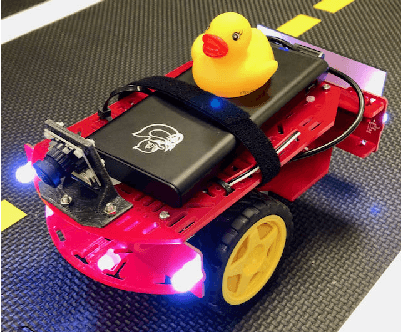
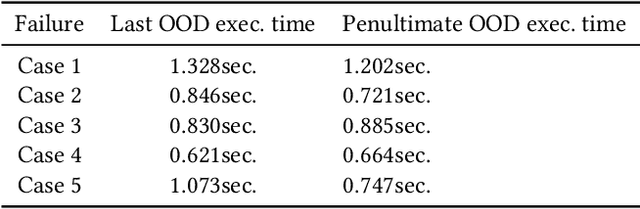
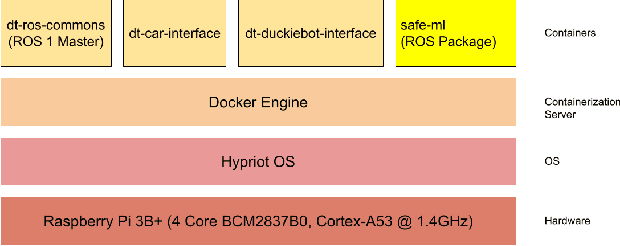
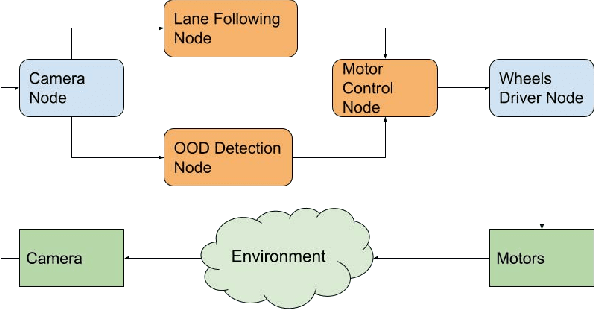
Machine learning (ML) is actively finding its way into modern cyber-physical systems (CPS), many of which are safety-critical real-time systems. It is well known that ML outputs are not reliable when testing data are novel with regards to model training and validation data, i.e., out-of-distribution (OOD) test data. We implement an unsupervised deep neural network-based OOD detector on a real-time embedded autonomous Duckiebot and evaluate detection performance. Our OOD detector produces a success rate of 87.5% for emergency stopping a Duckiebot on a braking test bed we designed. We also provide case analysis on computing resource challenges specific to the Robot Operating System (ROS) middleware on the Duckiebot.
* Yuhas, M., Feng, Y., Ng, D. J. X., Rahiminasab, Z., & Easwaran, A.
(2021, May). Embedded out-of-distribution detection on an autonomous robot
platform. In Proceedings of the Workshop on Design Automation for CPS and IoT
(pp. 13-18) * 6 pages, 8 figures
View paper on