 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDisentangled and Distilled Encoder for Out-of-Distribution Reasoning with Rademacher Guarantees
Dec 11, 2025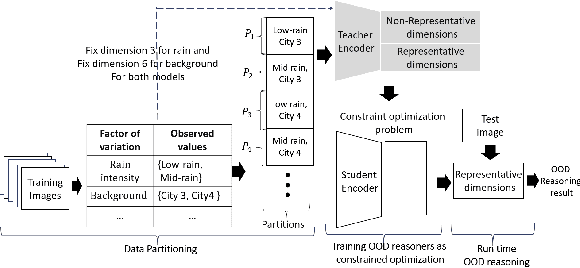
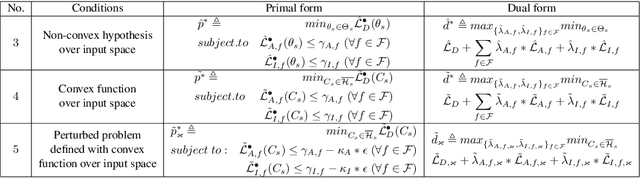
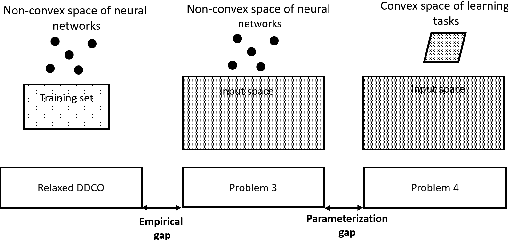
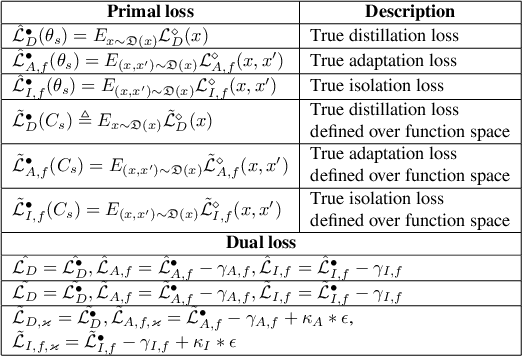
Recently, the disentangled latent space of a variational autoencoder (VAE) has been used to reason about multi-label out-of-distribution (OOD) test samples that are derived from different distributions than training samples. Disentangled latent space means having one-to-many maps between latent dimensions and generative factors or important characteristics of an image. This paper proposes a disentangled distilled encoder (DDE) framework to decrease the OOD reasoner size for deployment on resource-constrained devices while preserving disentanglement. DDE formalizes student-teacher distillation for model compression as a constrained optimization problem while preserving disentanglement with disentanglement constraints. Theoretical guarantees for disentanglement during distillation based on Rademacher complexity are established. The approach is evaluated empirically by deploying the compressed model on an NVIDIA
CRLLK: Constrained Reinforcement Learning for Lane Keeping in Autonomous Driving
Mar 28, 2025
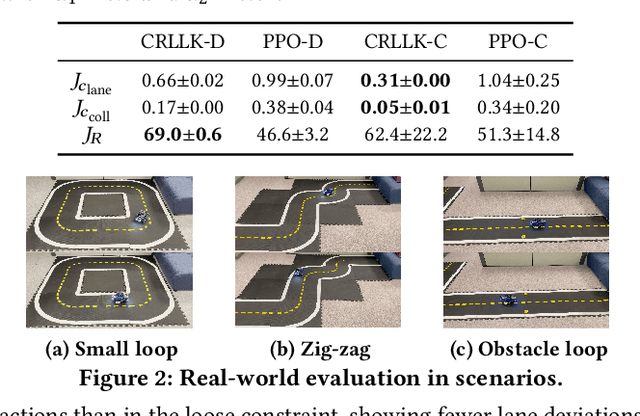
Lane keeping in autonomous driving systems requires scenario-specific weight tuning for different objectives. We formulate lane-keeping as a constrained reinforcement learning problem, where weight coefficients are automatically learned along with the policy, eliminating the need for scenario-specific tuning. Empirically, our approach outperforms traditional RL in efficiency and reliability. Additionally, real-world demonstrations validate its practical value for real-world autonomous driving.
Guaranteeing Out-Of-Distribution Detection in Deep RL via Transition Estimation
Mar 07, 2025An issue concerning the use of deep reinforcement learning (RL) agents is whether they can be trusted to perform reliably when deployed, as training environments may not reflect real-life environments. Anticipating instances outside their training scope, learning-enabled systems are often equipped with out-of-distribution (OOD) detectors that alert when a trained system encounters a state it does not recognize or in which it exhibits uncertainty. There exists limited work conducted on the problem of OOD detection within RL, with prior studies being unable to achieve a consensus on the definition of OOD execution within the context of RL. By framing our problem using a Markov Decision Process, we assume there is a transition distribution mapping each state-action pair to another state with some probability. Based on this, we consider the following definition of OOD execution within RL: A transition is OOD if its probability during real-life deployment differs from the transition distribution encountered during training. As such, we utilize conditional variational autoencoders (CVAE) to approximate the transition dynamics of the training environment and implement a conformity-based detector using reconstruction loss that is able to guarantee OOD detection with a pre-determined confidence level. We evaluate our detector by adapting existing benchmarks and compare it with existing OOD detection models for RL.
Compressing VAE-Based Out-of-Distribution Detectors for Embedded Deployment
Sep 02, 2024
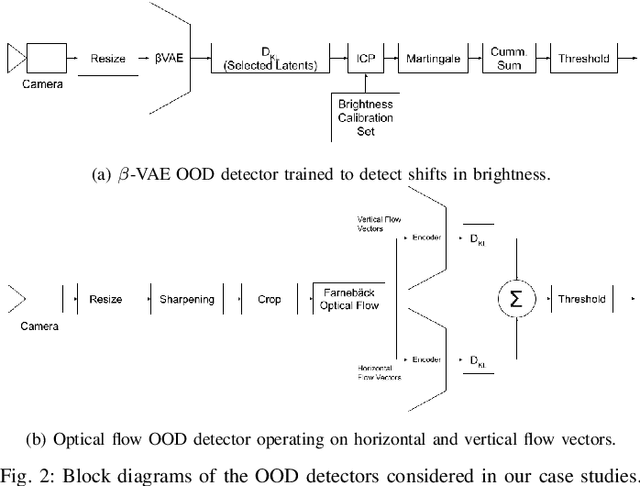

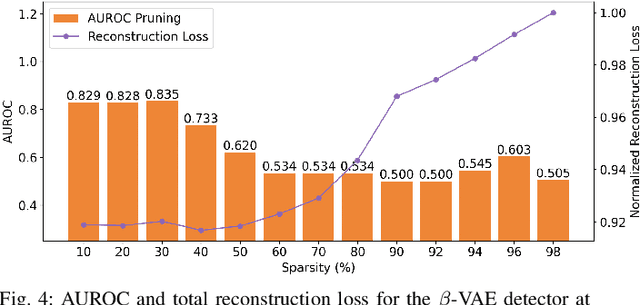
Out-of-distribution (OOD) detectors can act as safety monitors in embedded cyber-physical systems by identifying samples outside a machine learning model's training distribution to prevent potentially unsafe actions. However, OOD detectors are often implemented using deep neural networks, which makes it difficult to meet real-time deadlines on embedded systems with memory and power constraints. We consider the class of variational autoencoder (VAE) based OOD detectors where OOD detection is performed in latent space, and apply quantization, pruning, and knowledge distillation. These techniques have been explored for other deep models, but no work has considered their combined effect on latent space OOD detection. While these techniques increase the VAE's test loss, this does not correspond to a proportional decrease in OOD detection performance and we leverage this to develop lean OOD detectors capable of real-time inference on embedded CPUs and GPUs. We propose a design methodology that combines all three compression techniques and yields a significant decrease in memory and execution time while maintaining AUROC for a given OOD detector. We demonstrate this methodology with two existing OOD detectors on a Jetson Nano and reduce GPU and CPU inference time by 20% and 28% respectively while keeping AUROC within 5% of the baseline.
Co-Design of Out-of-Distribution Detectors for Autonomous Emergency Braking Systems
Jul 25, 2023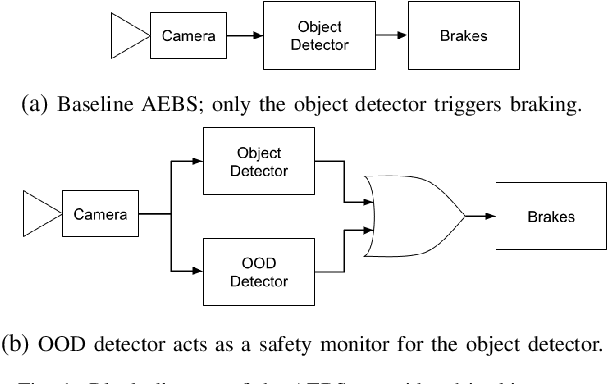
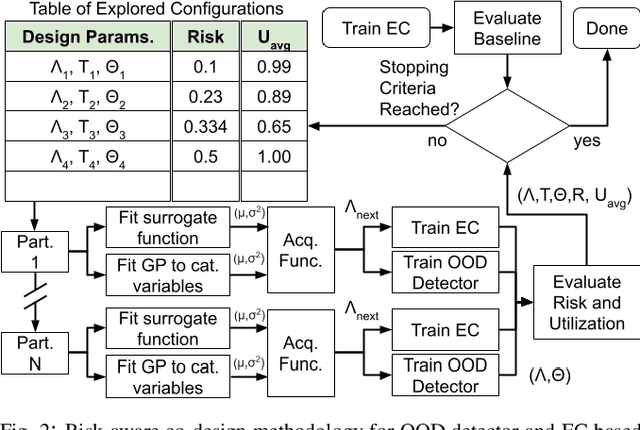

Learning enabled components (LECs), while critical for decision making in autonomous vehicles (AVs), are likely to make incorrect decisions when presented with samples outside of their training distributions. Out-of-distribution (OOD) detectors have been proposed to detect such samples, thereby acting as a safety monitor, however, both OOD detectors and LECs require heavy utilization of embedded hardware typically found in AVs. For both components, there is a tradeoff between non-functional and functional performance, and both impact a vehicle's safety. For instance, giving an OOD detector a longer response time can increase its accuracy at the expense of the LEC. We consider an LEC with binary output like an autonomous emergency braking system (AEBS) and use risk, the combination of severity and occurrence of a failure, to model the effect of both components' design parameters on each other's functional and non-functional performance, as well as their impact on system safety. We formulate a co-design methodology that uses this risk model to find the design parameters for an OOD detector and LEC that decrease risk below that of the baseline system and demonstrate it on a vision based AEBS. Using our methodology, we achieve a 42.3% risk reduction while maintaining equivalent resource utilization.
Demo Abstract: Real-Time Out-of-Distribution Detection on a Mobile Robot
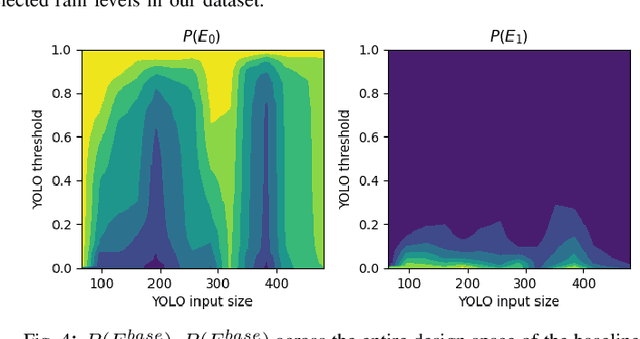
Nov 15, 2022In a cyber-physical system such as an autonomous vehicle (AV), machine learning (ML) models can be used to navigate and identify objects that may interfere with the vehicle's operation. However, ML models are unlikely to make accurate decisions when presented with data outside their training distribution. Out-of-distribution (OOD) detection can act as a safety monitor for ML models by identifying such samples at run time. However, in safety critical systems like AVs, OOD detection needs to satisfy real-time constraints in addition to functional requirements. In this demonstration, we use a mobile robot as a surrogate for an AV and use an OOD detector to identify potentially hazardous samples. The robot navigates a miniature town using image data and a YOLO object detection network. We show that our OOD detector is capable of identifying OOD images in real-time on an embedded platform concurrently performing object detection and lane following. We also show that it can be used to successfully stop the vehicle in the presence of unknown, novel samples.
Out of Distribution Reasoning by Weakly-Supervised Disentangled Logic Variational Autoencoder
Oct 18, 2022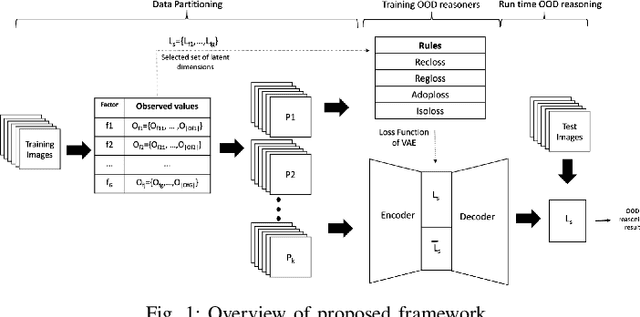
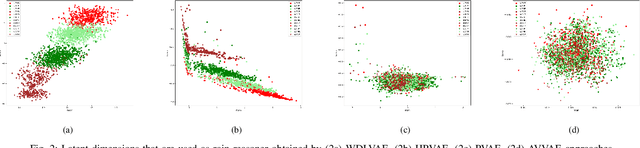
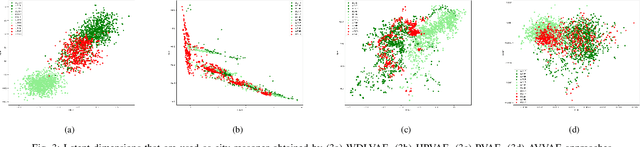
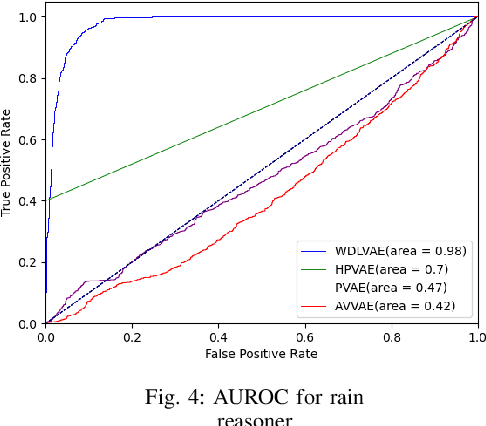
Out-of-distribution (OOD) detection, i.e., finding test samples derived from a different distribution than the training set, as well as reasoning about such samples (OOD reasoning), are necessary to ensure the safety of results generated by machine learning models. Recently there have been promising results for OOD detection in the latent space of variational autoencoders (VAEs). However, without disentanglement, VAEs cannot perform OOD reasoning. Disentanglement ensures a one- to-many mapping between generative factors of OOD (e.g., rain in image data) and the latent variables to which they are encoded. Although previous literature has focused on weakly-supervised disentanglement on simple datasets with known and independent generative factors. In practice, achieving full disentanglement through weak supervision is impossible for complex datasets, such as Carla, with unknown and abstract generative factors. As a result, we propose an OOD reasoning framework that learns a partially disentangled VAE to reason about complex datasets. Our framework consists of three steps: partitioning data based on observed generative factors, training a VAE as a logic tensor network that satisfies disentanglement rules, and run-time OOD reasoning. We evaluate our approach on the Carla dataset and compare the results against three state-of-the-art methods. We found that our framework outperformed these methods in terms of disentanglement and end-to-end OOD reasoning.
Design Methodology for Deep Out-of-Distribution Detectors in Real-Time Cyber-Physical Systems
Jul 29, 2022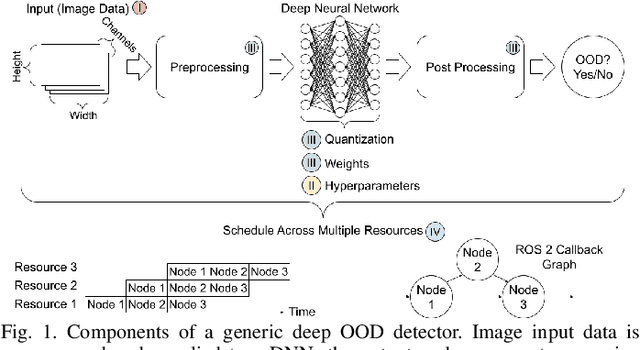
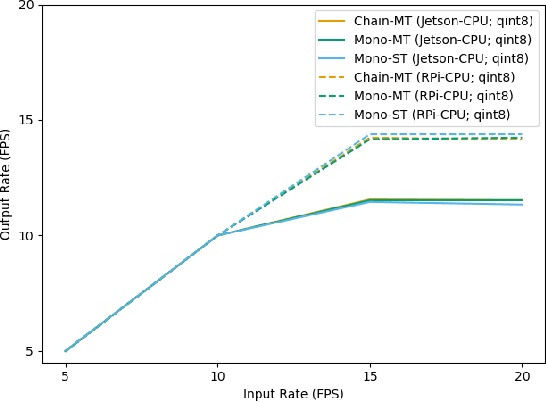
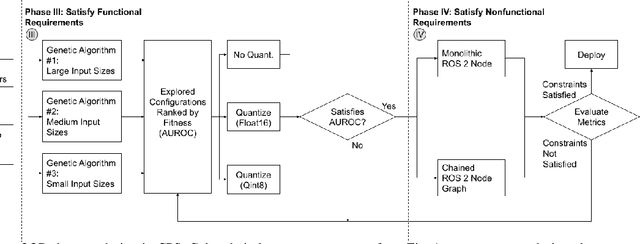
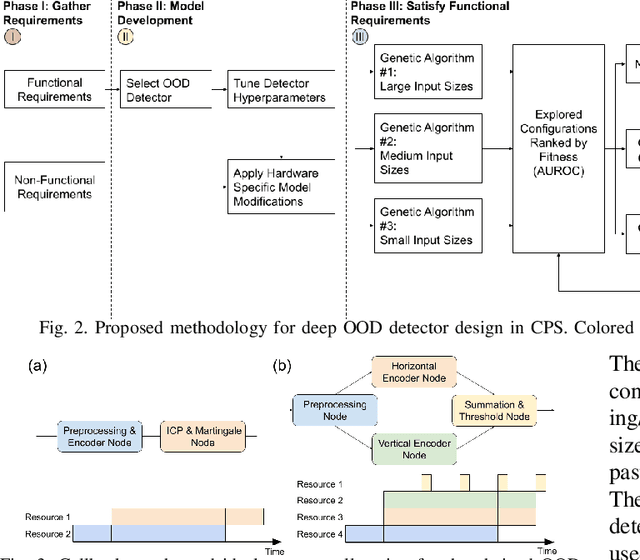
When machine learning (ML) models are supplied with data outside their training distribution, they are more likely to make inaccurate predictions; in a cyber-physical system (CPS), this could lead to catastrophic system failure. To mitigate this risk, an out-of-distribution (OOD) detector can run in parallel with an ML model and flag inputs that could lead to undesirable outcomes. Although OOD detectors have been well studied in terms of accuracy, there has been less focus on deployment to resource constrained CPSs. In this study, a design methodology is proposed to tune deep OOD detectors to meet the accuracy and response time requirements of embedded applications. The methodology uses genetic algorithms to optimize the detector's preprocessing pipeline and selects a quantization method that balances robustness and response time. It also identifies several candidate task graphs under the Robot Operating System (ROS) for deployment of the selected design. The methodology is demonstrated on two variational autoencoder based OOD detectors from the literature on two embedded platforms. Insights into the trade-offs that occur during the design process are provided, and it is shown that this design methodology can lead to a drastic reduction in response time in relation to an unoptimized OOD detector while maintaining comparable accuracy.
Embedded out-of-distribution detection on an autonomous robot platform
Jun 30, 2021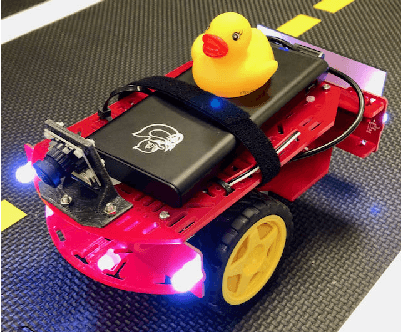
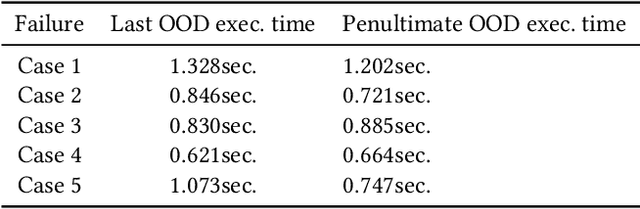
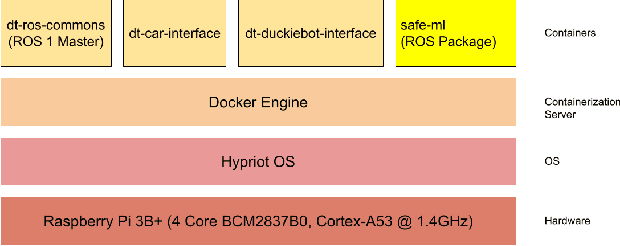
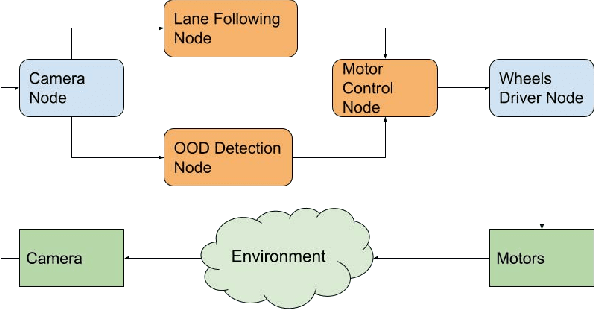
Machine learning (ML) is actively finding its way into modern cyber-physical systems (CPS), many of which are safety-critical real-time systems. It is well known that ML outputs are not reliable when testing data are novel with regards to model training and validation data, i.e., out-of-distribution (OOD) test data. We implement an unsupervised deep neural network-based OOD detector on a real-time embedded autonomous Duckiebot and evaluate detection performance. Our OOD detector produces a success rate of 87.5% for emergency stopping a Duckiebot on a braking test bed we designed. We also provide case analysis on computing resource challenges specific to the Robot Operating System (ROS) middleware on the Duckiebot.
* 6 pages, 8 figures