Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCRLLK: Constrained Reinforcement Learning for Lane Keeping in Autonomous Driving
Paper and Code

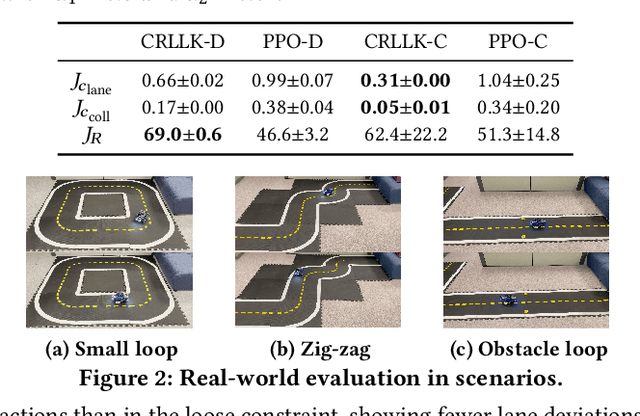
Lane keeping in autonomous driving systems requires scenario-specific weight tuning for different objectives. We formulate lane-keeping as a constrained reinforcement learning problem, where weight coefficients are automatically learned along with the policy, eliminating the need for scenario-specific tuning. Empirically, our approach outperforms traditional RL in efficiency and reliability. Additionally, real-world demonstrations validate its practical value for real-world autonomous driving.
* Accepted at AAMAS 2025 (Demonstration Track), 3 pages, 2 figures, 1
table
View paper on