 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLEAF + AIO: Edge-Assisted Energy-Aware Object Detection for Mobile Augmented Reality
May 27, 2022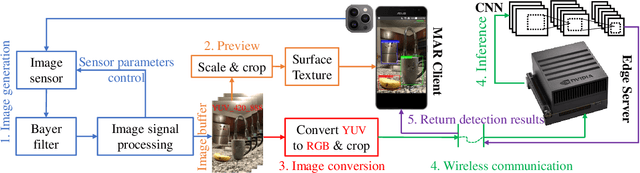
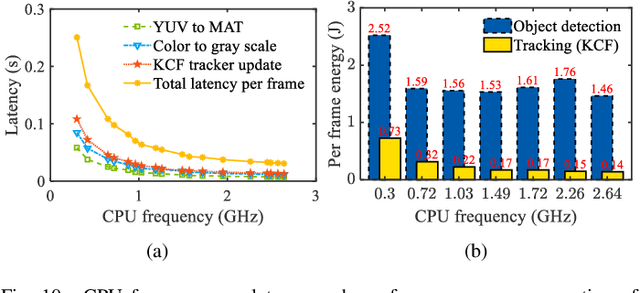
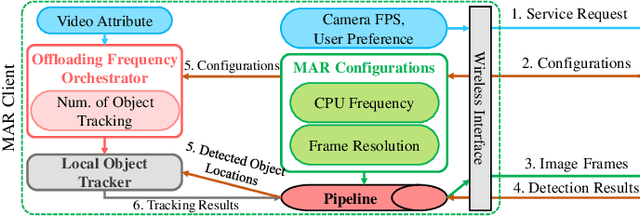
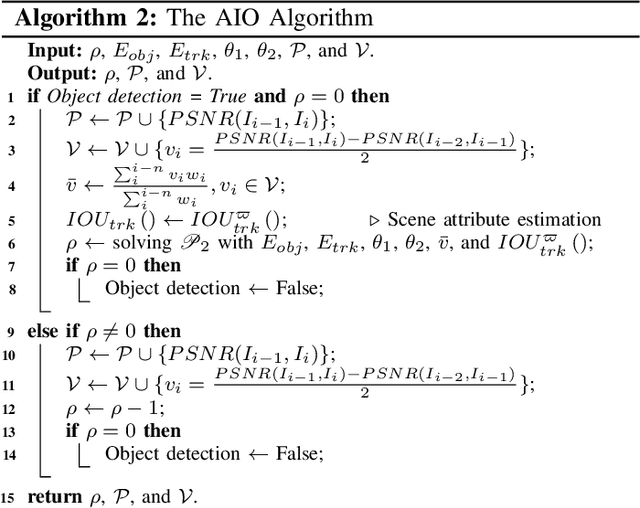
Today very few deep learning-based mobile augmented reality (MAR) applications are applied in mobile devices because they are significantly energy-guzzling. In this paper, we design an edge-based energy-aware MAR system that enables MAR devices to dynamically change their configurations, such as CPU frequency, computation model size, and image offloading frequency based on user preferences, camera sampling rates, and available radio resources. Our proposed dynamic MAR configuration adaptations can minimize the per frame energy consumption of multiple MAR clients without degrading their preferred MAR performance metrics, such as latency and detection accuracy. To thoroughly analyze the interactions among MAR configurations, user preferences, camera sampling rate, and energy consumption, we propose, to the best of our knowledge, the first comprehensive analytical energy model for MAR devices. Based on the proposed analytical model, we design a LEAF optimization algorithm to guide the MAR configuration adaptation and server radio resource allocation. An image offloading frequency orchestrator, coordinating with the LEAF, is developed to adaptively regulate the edge-based object detection invocations and to further improve the energy efficiency of MAR devices. Extensive evaluations are conducted to validate the performance of the proposed analytical model and algorithms.
LiveMap: Real-Time Dynamic Map in Automotive Edge Computing
Dec 16, 2020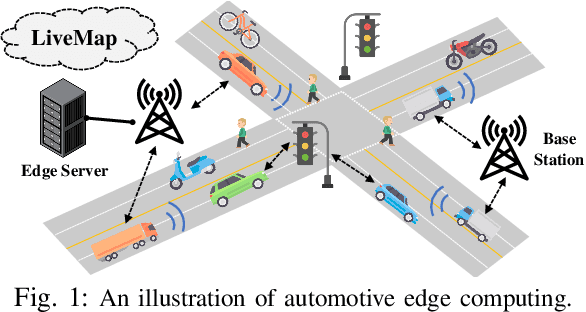
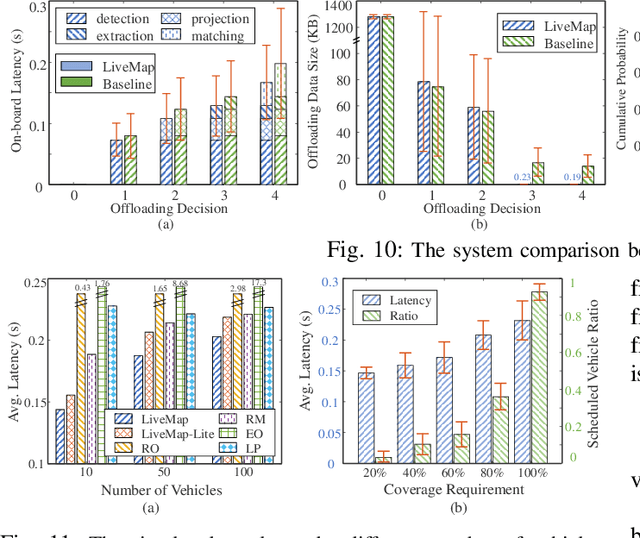
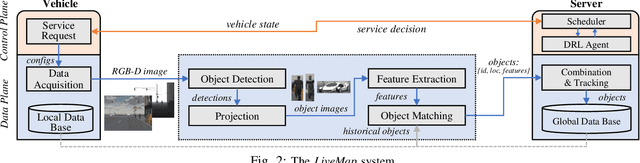
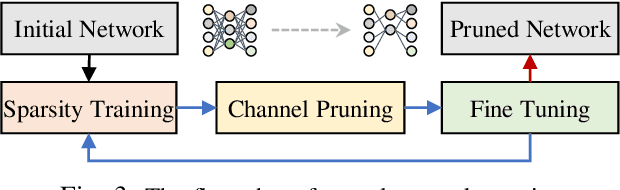
Autonomous driving needs various line-of-sight sensors to perceive surroundings that could be impaired under diverse environment uncertainties such as visual occlusion and extreme weather. To improve driving safety, we explore to wirelessly share perception information among connected vehicles within automotive edge computing networks. Sharing massive perception data in real time, however, is challenging under dynamic networking conditions and varying computation workloads. In this paper, we propose LiveMap, a real-time dynamic map, that detects, matches, and tracks objects on the road with crowdsourcing data from connected vehicles in sub-second. We develop the data plane of LiveMap that efficiently processes individual vehicle data with object detection, projection, feature extraction, object matching, and effectively integrates objects from multiple vehicles with object combination. We design the control plane of LiveMap that allows adaptive offloading of vehicle computations, and develop an intelligent vehicle scheduling and offloading algorithm to reduce the offloading latency of vehicles based on deep reinforcement learning (DRL) techniques. We implement LiveMap on a small-scale testbed and develop a large-scale network simulator. We evaluate the performance of LiveMap with both experiments and simulations, and the results show LiveMap reduces 34.1% average latency than the baseline solution.
Energy Drain of the Object Detection Processing Pipeline for Mobile Devices: Analysis and Implications
Nov 26, 2020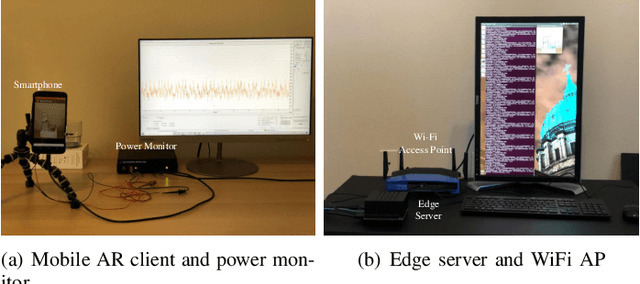
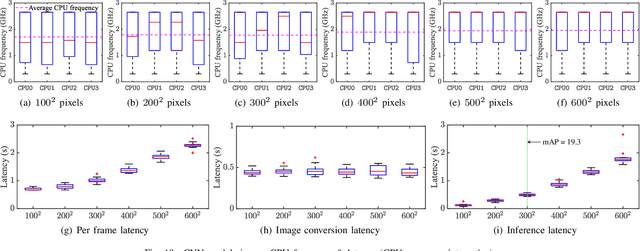
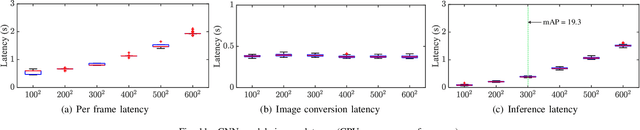
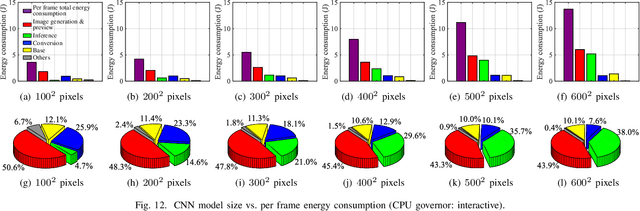
Applying deep learning to object detection provides the capability to accurately detect and classify complex objects in the real world. However, currently, few mobile applications use deep learning because such technology is computation-intensive and energy-consuming. This paper, to the best of our knowledge, presents the first detailed experimental study of a mobile augmented reality (AR) client's energy consumption and the detection latency of executing Convolutional Neural Networks (CNN) based object detection, either locally on the smartphone or remotely on an edge server. In order to accurately measure the energy consumption on the smartphone and obtain the breakdown of energy consumed by each phase of the object detection processing pipeline, we propose a new measurement strategy. Our detailed measurements refine the energy analysis of mobile AR clients and reveal several interesting perspectives regarding the energy consumption of executing CNN-based object detection. Furthermore, several insights and research opportunities are proposed based on our experimental results. These findings from our experimental study will guide the design of energy-efficient processing pipeline of CNN-based object detection.
Runtime-Safety-Guided Policy Repair
Aug 17, 2020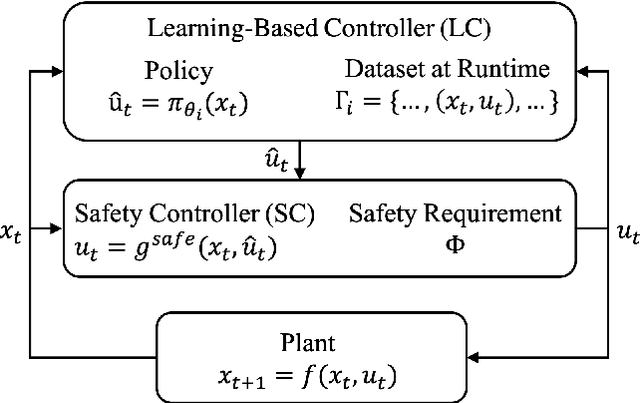
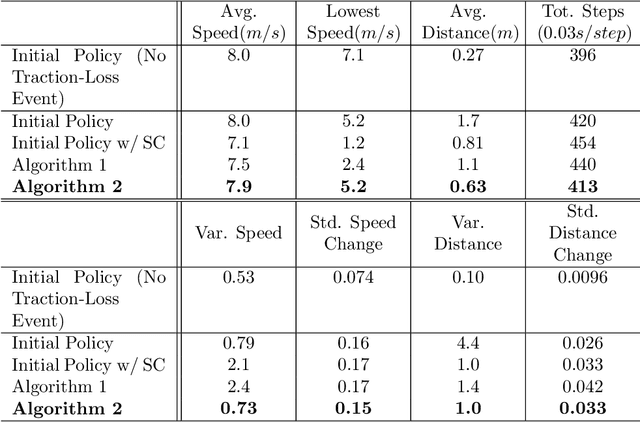
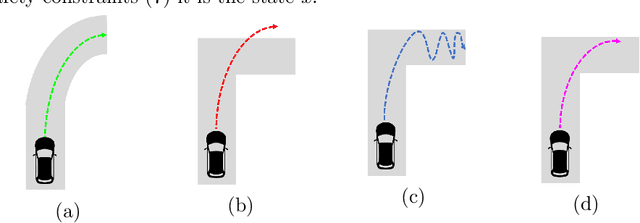
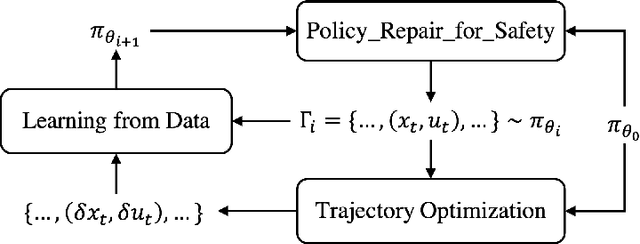
We study the problem of policy repair for learning-based control policies in safety-critical settings. We consider an architecture where a high-performance learning-based control policy (e.g. one trained as a neural network) is paired with a model-based safety controller. The safety controller is endowed with the abilities to predict whether the trained policy will lead the system to an unsafe state, and take over control when necessary. While this architecture can provide added safety assurances, intermittent and frequent switching between the trained policy and the safety controller can result in undesirable behaviors and reduced performance. We propose to reduce or even eliminate control switching by `repairing' the trained policy based on runtime data produced by the safety controller in a way that deviates minimally from the original policy. The key idea behind our approach is the formulation of a trajectory optimization problem that allows the joint reasoning of policy update and safety constraints. Experimental results demonstrate that our approach is effective even when the system model in the safety controller is unknown and only approximated.
Are Self-Driving Cars Secure? Evasion Attacks against Deep Neural Networks for Steering Angle Prediction
Apr 15, 2019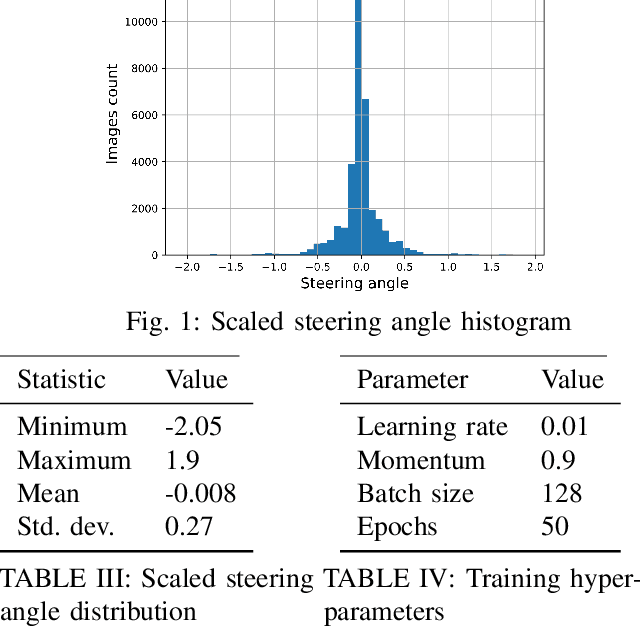
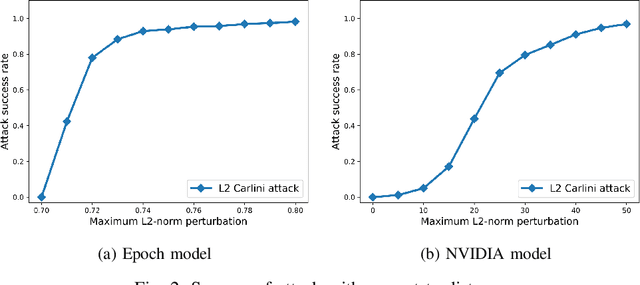
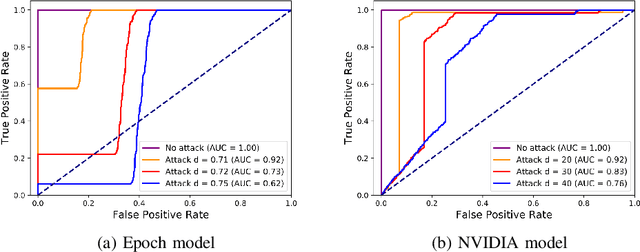
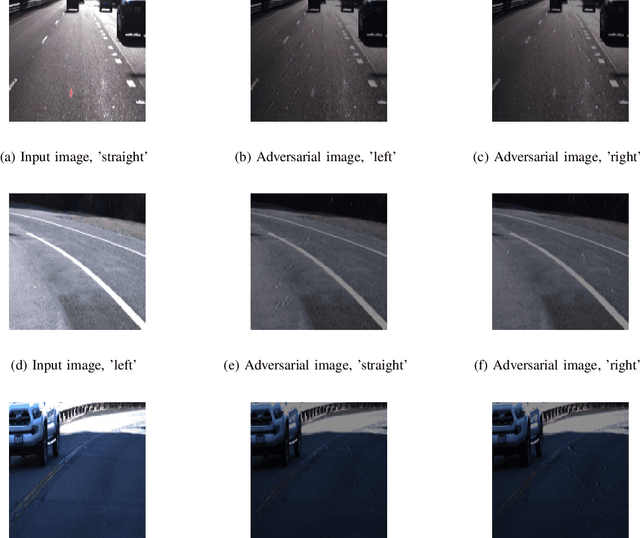
Deep Neural Networks (DNNs) have tremendous potential in advancing the vision for self-driving cars. However, the security of DNN models in this context leads to major safety implications and needs to be better understood. We consider the case study of steering angle prediction from camera images, using the dataset from the 2014 Udacity challenge. We demonstrate for the first time adversarial testing-time attacks for this application for both classification and regression settings. We show that minor modifications to the camera image (an L2 distance of 0.82 for one of the considered models) result in mis-classification of an image to any class of attacker's choice. Furthermore, our regression attack results in a significant increase in Mean Square Error (MSE) by a factor of 69 in the worst case.
Lookup Table-Based Consensus Algorithm for Real-Time Longitudinal Motion Control of Connected and Automated Vehicles
Feb 26, 2019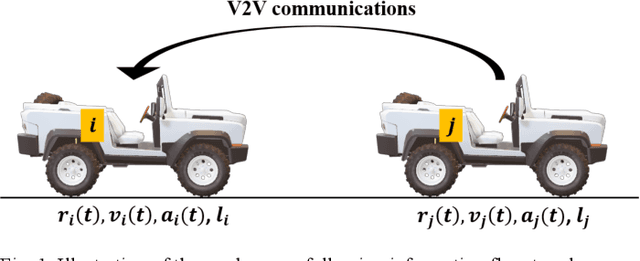
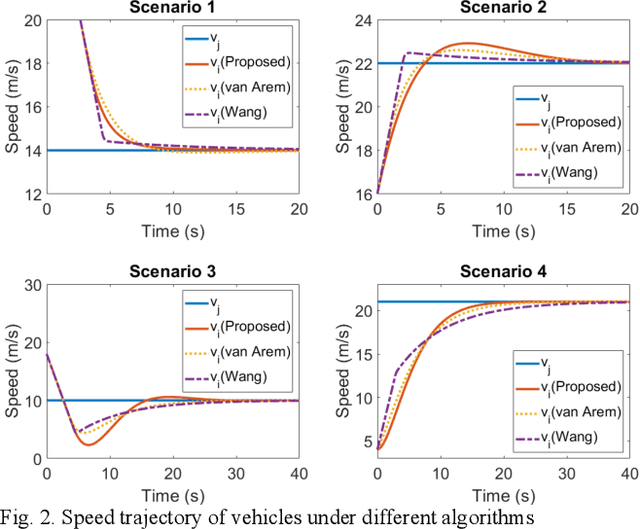
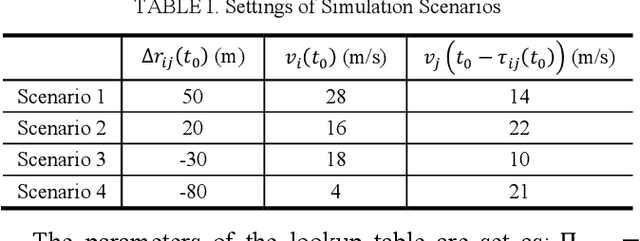
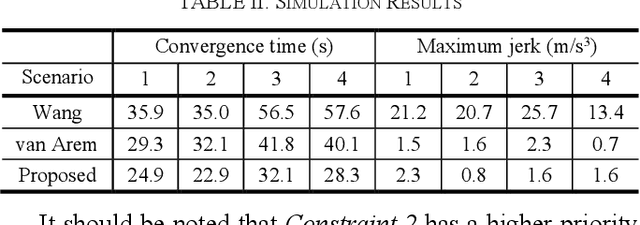
Connected and automated vehicle (CAV) technology is one of the promising solutions to addressing the safety, mobility and sustainability issues of our current transportation systems. Specifically, the control algorithm plays an important role in a CAV system, since it executes the commands generated by former steps, such as communication, perception, and planning. In this study, we propose a consensus algorithm to control the longitudinal motion of CAVs in real time. Different from previous studies in this field where control gains of the consensus algorithm are pre-determined and fixed, we develop algorithms to build up a lookup table, searching for the ideal control gains with respect to different initial conditions of CAVs in real time. Numerical simulation shows that, the proposed lookup table-based consensus algorithm outperforms the authors' previous work, as well as van Arem's linear feedback-based longitudinal motion control algorithm in all four different scenarios with various initial conditions of CAVs, in terms of convergence time and maximum jerk of the simulation run.