 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Cross-Domain Generalization Using Unlabeled Target Data with Source-Domain Supervision
May 27, 2026It is often desirable to generalize medical imaging AI models trained with dense annotations to data acquired from different ultrasound scanners or clinical sites; however, retraining these models with new annotations is often difficult and costly. We examine this challenge in pediatric wrist fracture assessment using point-of-care ultrasound (POCUS), where fractures are common and can be effectively triaged via ultrasound. AI has shown radiologist-level performance for fracture detection, often aided by high-quality bony structure segmentation. However, due to significant domain shifts, models perform poorly on data from other centers or probes, and obtaining segmentation labels across devices is impractical due to manual annotation effort and data privacy concerns. To address this, we propose a target-informed self-supervised pretraining and model-ensemble strategy. Specifically, our approach combines masked image modeling (MIM) and contrastive learning to learn target-domain structural representations without labels, and introduces a confidence-aware infusion head to adaptively integrate predictions. The source dataset, collected with a Philips Lumify probe, contained dense labels, while the target dataset, acquired with a TeleMED portable probe, was unlabeled. The datasets were kept strictly separate throughout the entire process. Our method used labeled source data for supervised training and leveraged target-domain pretraining to improve generalization. On 318 images from 62 pediatric POCUS videos, this approach significantly improved cross-device performance, achieving over 6% Dice improvement on the target domain versus the baseline. These results demonstrate a label-efficient and privacy-preserving approach for cross-device-robust ultrasound AI, offering a framework that can be extended to multi-center studies or federated learning setups.
Maximizing User Connectivity in AI-Enabled Multi-UAV Networks: A Distributed Strategy Generalized to Arbitrary User Distributions
Nov 07, 2024



Deep reinforcement learning (DRL) has been extensively applied to Multi-Unmanned Aerial Vehicle (UAV) network (MUN) to effectively enable real-time adaptation to complex, time-varying environments. Nevertheless, most of the existing works assume a stationary user distribution (UD) or a dynamic one with predicted patterns. Such considerations may make the UD-specific strategies insufficient when a MUN is deployed in unknown environments. To this end, this paper investigates distributed user connectivity maximization problem in a MUN with generalization to arbitrary UDs. Specifically, the problem is first formulated into a time-coupled combinatorial nonlinear non-convex optimization with arbitrary underlying UDs. To make the optimization tractable, a multi-agent CNN-enhanced deep Q learning (MA-CDQL) algorithm is proposed. The algorithm integrates a ResNet-based CNN to the policy network to analyze the input UD in real time and obtain optimal decisions based on the extracted high-level UD features. To improve the learning efficiency and avoid local optimums, a heatmap algorithm is developed to transform the raw UD to a continuous density map. The map will be part of the true input to the policy network. Simulations are conducted to demonstrate the efficacy of UD heatmaps and the proposed algorithm in maximizing user connectivity as compared to K-means methods.
Learning with Dynamics: Autonomous Regulation of UAV Based Communication Networks with Dynamic UAV Crew
Sep 25, 2024Unmanned Aerial Vehicle (UAV) based communication networks (UCNs) are a key component in future mobile networking. To handle the dynamic environments in UCNs, reinforcement learning (RL) has been a promising solution attributed to its strong capability of adaptive decision-making free of the environment models. However, most existing RL-based research focus on control strategy design assuming a fixed set of UAVs. Few works have investigated how UCNs should be adaptively regulated when the serving UAVs change dynamically. This article discusses RL-based strategy design for adaptive UCN regulation given a dynamic UAV set, addressing both reactive strategies in general UCNs and proactive strategies in solar-powered UCNs. An overview of the UCN and the RL framework is first provided. Potential research directions with key challenges and possible solutions are then elaborated. Some of our recent works are presented as case studies to inspire innovative ways to handle dynamic UAV crew with different RL algorithms.
Mapping the Provenance Ontology to Basic Formal Ontology
Aug 02, 2024The Provenance Ontology (PROV-O) is a World Wide Web Consortium (W3C) recommended ontology used to structure data about provenance across a wide variety of domains. Basic Formal Ontology (BFO) is a top-level ontology ISO/IEC standard used to structure a wide variety of ontologies, such as the OBO Foundry ontologies and the Common Core Ontologies (CCO). To enhance interoperability between these two ontologies, their extensions, and data organized by them, an alignment is presented according to a specific mapping criteria and methodology which prioritizes structural and semantic considerations. The ontology alignment is evaluated by checking its logical consistency with canonical examples of PROV-O instances and querying terms that do not satisfy the mapping criteria as formalized in SPARQL. A variety of semantic web technologies are used in support of FAIR (Findable, Accessible, Interoperable, Reusable) principles.
LiveMap: Real-Time Dynamic Map in Automotive Edge Computing
Dec 16, 2020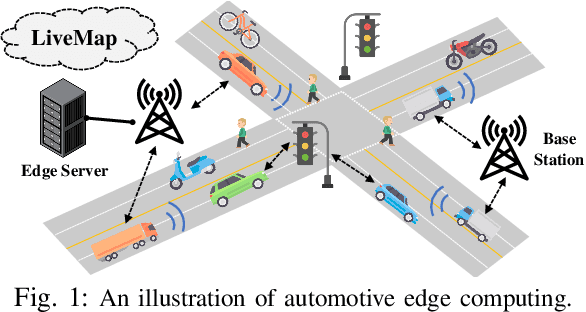
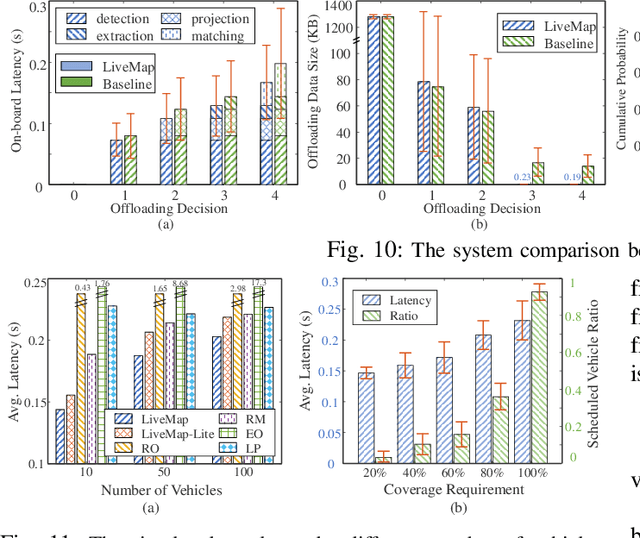
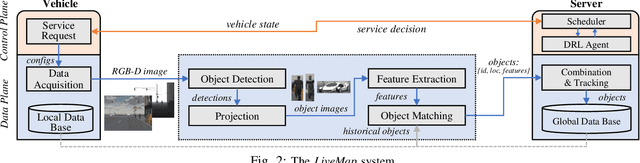
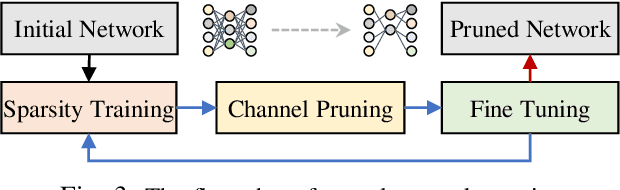
Autonomous driving needs various line-of-sight sensors to perceive surroundings that could be impaired under diverse environment uncertainties such as visual occlusion and extreme weather. To improve driving safety, we explore to wirelessly share perception information among connected vehicles within automotive edge computing networks. Sharing massive perception data in real time, however, is challenging under dynamic networking conditions and varying computation workloads. In this paper, we propose LiveMap, a real-time dynamic map, that detects, matches, and tracks objects on the road with crowdsourcing data from connected vehicles in sub-second. We develop the data plane of LiveMap that efficiently processes individual vehicle data with object detection, projection, feature extraction, object matching, and effectively integrates objects from multiple vehicles with object combination. We design the control plane of LiveMap that allows adaptive offloading of vehicle computations, and develop an intelligent vehicle scheduling and offloading algorithm to reduce the offloading latency of vehicles based on deep reinforcement learning (DRL) techniques. We implement LiveMap on a small-scale testbed and develop a large-scale network simulator. We evaluate the performance of LiveMap with both experiments and simulations, and the results show LiveMap reduces 34.1% average latency than the baseline solution.