 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCapturing Opinion Shifts in Deliberative Discourse through Frequency-based Quantum deep learning methods
Sep 26, 2025Deliberation plays a crucial role in shaping outcomes by weighing diverse perspectives before reaching decisions. With recent advancements in Natural Language Processing, it has become possible to computationally model deliberation by analyzing opinion shifts and predicting potential outcomes under varying scenarios. In this study, we present a comparative analysis of multiple NLP techniques to evaluate how effectively models interpret deliberative discourse and produce meaningful insights. Opinions from individuals of varied backgrounds were collected to construct a self-sourced dataset that reflects diverse viewpoints. Deliberation was simulated using product presentations enriched with striking facts, which often prompted measurable shifts in audience opinions. We have given comparative analysis between two models namely Frequency-Based Discourse Modulation and Quantum-Deliberation Framework which outperform the existing state of art models. The findings highlight practical applications in public policy-making, debate evaluation, decision-support frameworks, and large-scale social media opinion mining.
Hierarchical Unsupervised Topological SLAM
Oct 07, 2023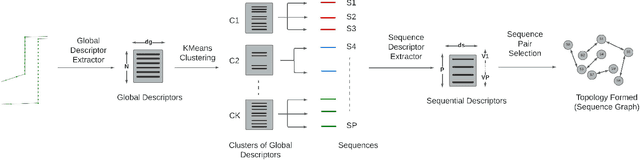
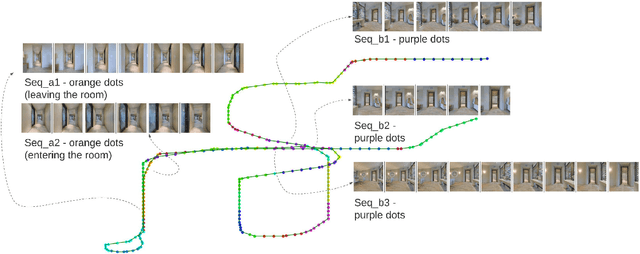
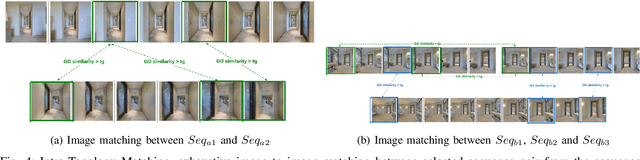

In this paper we present a novel framework for unsupervised topological clustering resulting in improved loop. In this paper we present a novel framework for unsupervised topological clustering resulting in improved loop detection and closure for SLAM. A navigating mobile robot clusters its traversal into visually similar topologies where each cluster (topology) contains a set of similar looking images typically observed from spatially adjacent locations. Each such set of spatially adjacent and visually similar grouping of images constitutes a topology obtained without any supervision. We formulate a hierarchical loop discovery strategy that first detects loops at the level of topologies and subsequently at the level of images between the looped topologies. We show over a number of traversals across different Habitat environments that such a hierarchical pipeline significantly improves SOTA image based loop detection and closure methods. Further, as a consequence of improved loop detection, we enhance the loop closure and backend SLAM performance. Such a rendering of a traversal into topological segments is beneficial for downstream tasks such as navigation that can now build a topological graph where spatially adjacent topological clusters are connected by an edge and navigate over such topological graphs.
Malaria Detection and Classificaiton
Nov 29, 2020Malaria is a disease of global concern according to the World Health Organization. Billions of people in the world are at risk of Malaria today. Microscopy is considered the gold standard for Malaria diagnosis. Microscopic assessment of blood samples requires the need of trained professionals who at times are not available in rural areas where Malaria is a problem. Full automation of Malaria diagnosis is a challenging task. In this work, we put forward a framework for diagnosis of malaria. We adopt a two layer approach, where we detect infected cells using a Faster-RCNN in the first layer, crop them out, and feed the cropped cells to a seperate neural network for classification. The proposed methodology was tested on an openly available dataset, this will serve as a baseline for the future methods as currently there is no common dataset on which results are reported for Malaria Diagnosis.
IIT Varanasi at MSR-SRST 2018: A Language Model Based Approach for Natural Language Generation
Apr 12, 2019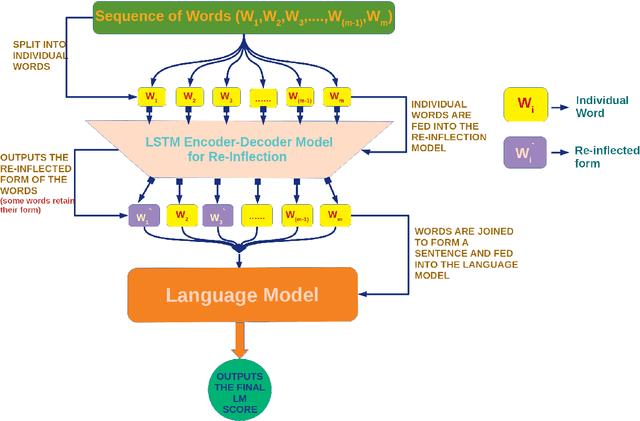
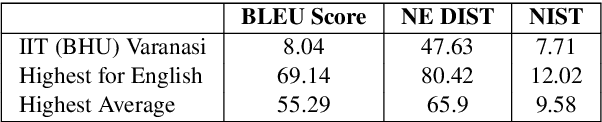
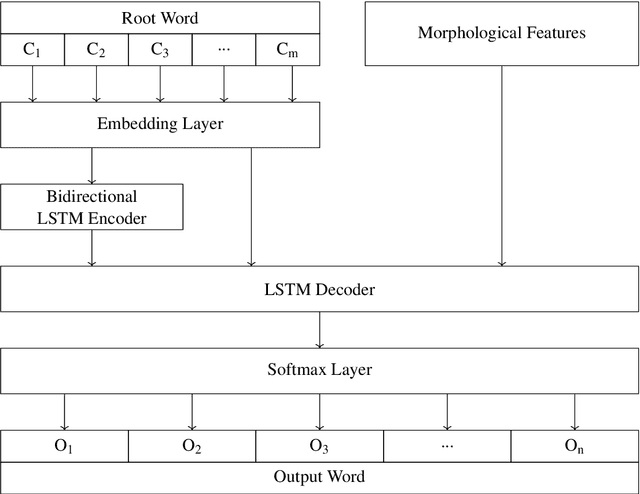
This paper describes our submission system for the Shallow Track of Surface Realization Shared Task 2018 (SRST'18). The task was to convert genuine UD structures, from which word order information had been removed and the tokens had been lemmatized, into their correct sentential form. We divide the problem statement into two parts, word reinflection and correct word order prediction. For the first sub-problem, we use a Long Short Term Memory based Encoder-Decoder approach. For the second sub-problem, we present a Language Model (LM) based approach. We apply two different sub-approaches in the LM Based approach and the combined result of these two approaches is considered as the final output of the system.
On Optimizing Human-Machine Task Assignments
Sep 24, 2015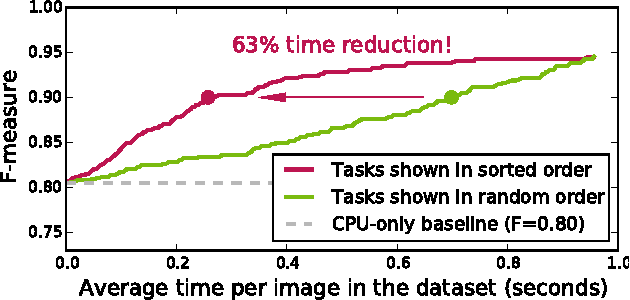
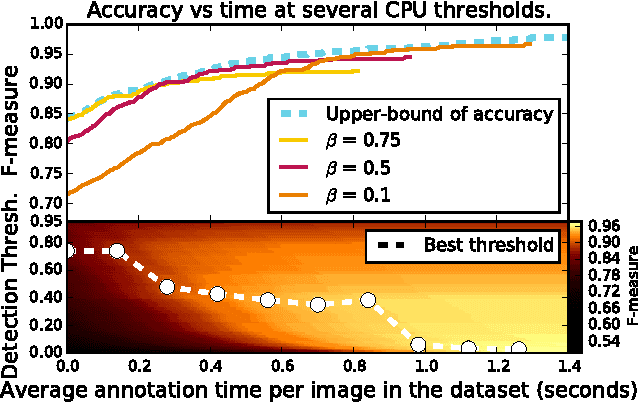
When crowdsourcing systems are used in combination with machine inference systems in the real world, they benefit the most when the machine system is deeply integrated with the crowd workers. However, if researchers wish to integrate the crowd with "off-the-shelf" machine classifiers, this deep integration is not always possible. This work explores two strategies to increase accuracy and decrease cost under this setting. First, we show that reordering tasks presented to the human can create a significant accuracy improvement. Further, we show that greedily choosing parameters to maximize machine accuracy is sub-optimal, and joint optimization of the combined system improves performance.