 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQueSTMaps: Queryable Semantic Topological Maps for 3D Scene Understanding
Apr 09, 2024Understanding the structural organisation of 3D indoor scenes in terms of rooms is often accomplished via floorplan extraction. Robotic tasks such as planning and navigation require a semantic understanding of the scene as well. This is typically achieved via object-level semantic segmentation. However, such methods struggle to segment out topological regions like "kitchen" in the scene. In this work, we introduce a two-step pipeline. First, we extract a topological map, i.e., floorplan of the indoor scene using a novel multi-channel occupancy representation. Then, we generate CLIP-aligned features and semantic labels for every room instance based on the objects it contains using a self-attention transformer. Our language-topology alignment supports natural language querying, e.g., a "place to cook" locates the "kitchen". We outperform the current state-of-the-art on room segmentation by ~20% and room classification by ~12%. Our detailed qualitative analysis and ablation studies provide insights into the problem of joint structural and semantic 3D scene understanding.
Hierarchical Unsupervised Topological SLAM
Oct 07, 2023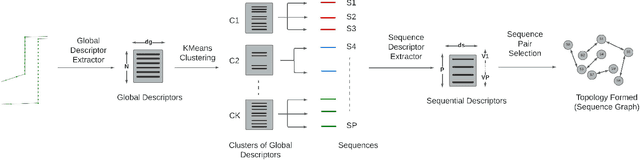
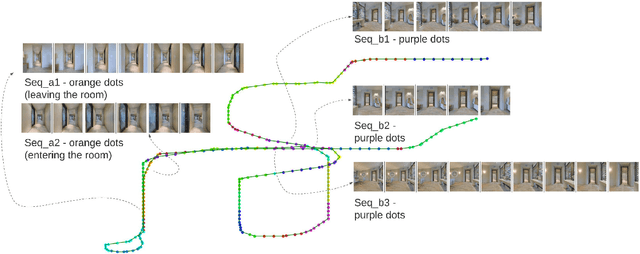
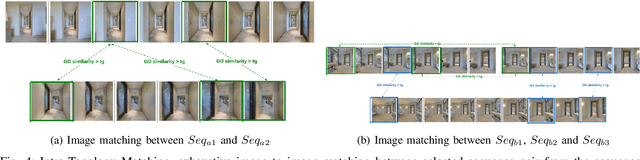

In this paper we present a novel framework for unsupervised topological clustering resulting in improved loop. In this paper we present a novel framework for unsupervised topological clustering resulting in improved loop detection and closure for SLAM. A navigating mobile robot clusters its traversal into visually similar topologies where each cluster (topology) contains a set of similar looking images typically observed from spatially adjacent locations. Each such set of spatially adjacent and visually similar grouping of images constitutes a topology obtained without any supervision. We formulate a hierarchical loop discovery strategy that first detects loops at the level of topologies and subsequently at the level of images between the looped topologies. We show over a number of traversals across different Habitat environments that such a hierarchical pipeline significantly improves SOTA image based loop detection and closure methods. Further, as a consequence of improved loop detection, we enhance the loop closure and backend SLAM performance. Such a rendering of a traversal into topological segments is beneficial for downstream tasks such as navigation that can now build a topological graph where spatially adjacent topological clusters are connected by an edge and navigate over such topological graphs.