 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSegMASt3R: Geometry Grounded Segment Matching
Oct 06, 2025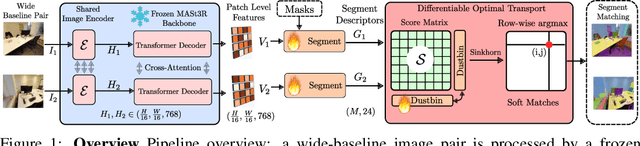
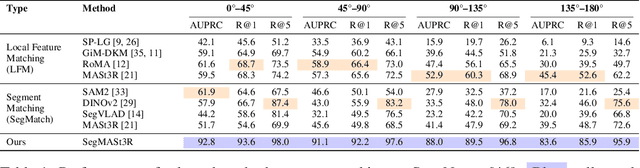

Segment matching is an important intermediate task in computer vision that establishes correspondences between semantically or geometrically coherent regions across images. Unlike keypoint matching, which focuses on localized features, segment matching captures structured regions, offering greater robustness to occlusions, lighting variations, and viewpoint changes. In this paper, we leverage the spatial understanding of 3D foundation models to tackle wide-baseline segment matching, a challenging setting involving extreme viewpoint shifts. We propose an architecture that uses the inductive bias of these 3D foundation models to match segments across image pairs with up to 180 degree view-point change. Extensive experiments show that our approach outperforms state-of-the-art methods, including the SAM2 video propagator and local feature matching methods, by upto 30% on the AUPRC metric, on ScanNet++ and Replica datasets. We further demonstrate benefits of the proposed model on relevant downstream tasks, including 3D instance segmentation and image-goal navigation. Project Page: https://segmast3r.github.io/
QueSTMaps: Queryable Semantic Topological Maps for 3D Scene Understanding
Apr 09, 2024Understanding the structural organisation of 3D indoor scenes in terms of rooms is often accomplished via floorplan extraction. Robotic tasks such as planning and navigation require a semantic understanding of the scene as well. This is typically achieved via object-level semantic segmentation. However, such methods struggle to segment out topological regions like "kitchen" in the scene. In this work, we introduce a two-step pipeline. First, we extract a topological map, i.e., floorplan of the indoor scene using a novel multi-channel occupancy representation. Then, we generate CLIP-aligned features and semantic labels for every room instance based on the objects it contains using a self-attention transformer. Our language-topology alignment supports natural language querying, e.g., a "place to cook" locates the "kitchen". We outperform the current state-of-the-art on room segmentation by ~20% and room classification by ~12%. Our detailed qualitative analysis and ablation studies provide insights into the problem of joint structural and semantic 3D scene understanding.