 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMASt3R-Nav: WayPixel Navigation in Relative 3D Maps
May 22, 2026Visual navigation ability is strongly tied to its underlying representation of the world. Unlike classical 3D maps that require globally-consistent geometry, image- or object-relative topological graphs almost entirely do away with geometric understanding. But, this comes at the cost of navigation capability, often limiting it to merely teach-and-repeat. In this work, we propose a novel map representation in the form of pixel-relative connectivity, which is geometrically accurate but does not require global geometric consistency. Inspired by recent progress in 3D grounded image matching, we construct a map from an image sequence through inter-image connectivity based on pixel correspondences in the relative 3D coordinate systems of individual image pairs. We then use this pixel-level graph to perform global path planning by approximating and sparsifying intra-image pixel connectivity. Through this, we derive a ''WayPixel Costmap'' representation and train a controller conditioned on it to predict a trajectory rollout. We show that this dense pixel-level costmap based on relative geometry is a more accurate conditioning variable for control prediction than its image- and object-level counterparts. This enables a highly capable navigation system, as validated on four types of navigation tasks in the simulator and through real world demonstrations.
Leveraging Cycle-Consistent Anchor Points for Self-Supervised RGB-D Registration
Oct 16, 2025With the rise in consumer depth cameras, a wealth of unlabeled RGB-D data has become available. This prompts the question of how to utilize this data for geometric reasoning of scenes. While many RGB-D registration meth- ods rely on geometric and feature-based similarity, we take a different approach. We use cycle-consistent keypoints as salient points to enforce spatial coherence constraints during matching, improving correspondence accuracy. Additionally, we introduce a novel pose block that combines a GRU recurrent unit with transformation synchronization, blending historical and multi-view data. Our approach surpasses previous self- supervised registration methods on ScanNet and 3DMatch, even outperforming some older supervised methods. We also integrate our components into existing methods, showing their effectiveness.
* 8 pages, accepted at ICRA 2024 (International Conference on Robotics and Automation)
SegMASt3R: Geometry Grounded Segment Matching
Oct 06, 2025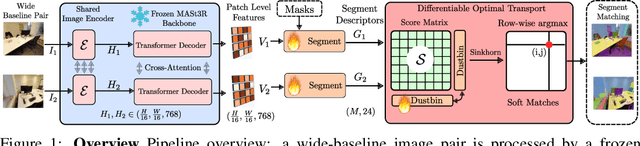
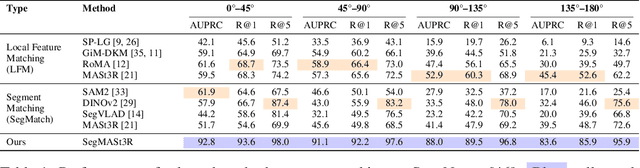

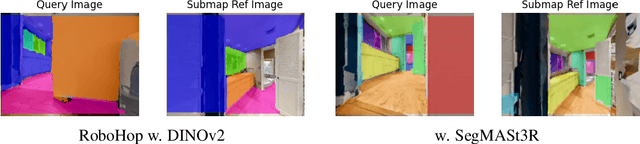
Segment matching is an important intermediate task in computer vision that establishes correspondences between semantically or geometrically coherent regions across images. Unlike keypoint matching, which focuses on localized features, segment matching captures structured regions, offering greater robustness to occlusions, lighting variations, and viewpoint changes. In this paper, we leverage the spatial understanding of 3D foundation models to tackle wide-baseline segment matching, a challenging setting involving extreme viewpoint shifts. We propose an architecture that uses the inductive bias of these 3D foundation models to match segments across image pairs with up to 180 degree view-point change. Extensive experiments show that our approach outperforms state-of-the-art methods, including the SAM2 video propagator and local feature matching methods, by upto 30% on the AUPRC metric, on ScanNet++ and Replica datasets. We further demonstrate benefits of the proposed model on relevant downstream tasks, including 3D instance segmentation and image-goal navigation. Project Page: https://segmast3r.github.io/
Pose-Guided Self-Training with Two-Stage Clustering for Unsupervised Landmark Discovery
Mar 24, 2024Unsupervised landmarks discovery (ULD) for an object category is a challenging computer vision problem. In pursuit of developing a robust ULD framework, we explore the potential of a recent paradigm of self-supervised learning algorithms, known as diffusion models. Some recent works have shown that these models implicitly contain important correspondence cues. Towards harnessing the potential of diffusion models for the ULD task, we make the following core contributions. First, we propose a ZeroShot ULD baseline based on simple clustering of random pixel locations with nearest neighbour matching. It delivers better results than existing ULD methods. Second, motivated by the ZeroShot performance, we develop a ULD algorithm based on diffusion features using self-training and clustering which also outperforms prior methods by notable margins. Third, we introduce a new proxy task based on generating latent pose codes and also propose a two-stage clustering mechanism to facilitate effective pseudo-labeling, resulting in a significant performance improvement. Overall, our approach consistently outperforms state-of-the-art methods on four challenging benchmarks AFLW, MAFL, CatHeads and LS3D by significant margins.
Unsupervised Deep Graph Matching Based on Cycle Consistency
Aug 01, 2023
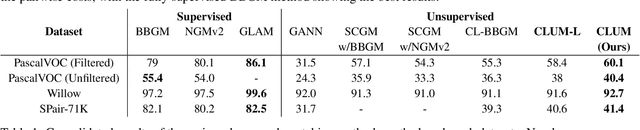


We contribute to the sparsely populated area of unsupervised deep graph matching with application to keypoint matching in images. Contrary to the standard \emph{supervised} approach, our method does not require ground truth correspondences between keypoint pairs. Instead, it is self-supervised by enforcing consistency of matchings between images of the same object category. As the matching and the consistency loss are discrete, their derivatives cannot be straightforwardly used for learning. We address this issue in a principled way by building our method upon the recent results on black-box differentiation of combinatorial solvers. This makes our method exceptionally flexible, as it is compatible with arbitrary network architectures and combinatorial solvers. Our experimental evaluation suggests that our technique sets a new state-of-the-art for unsupervised graph matching.
MPLP++: Fast, Parallel Dual Block-Coordinate Ascent for Dense Graphical Models
Apr 16, 2020
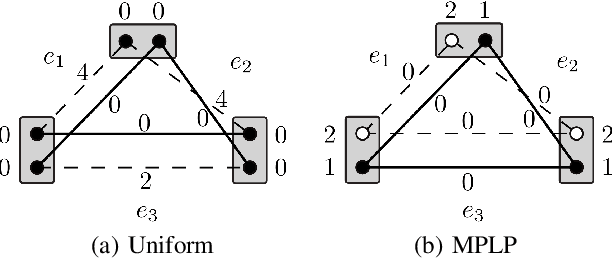
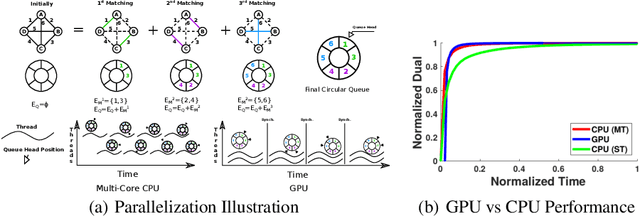
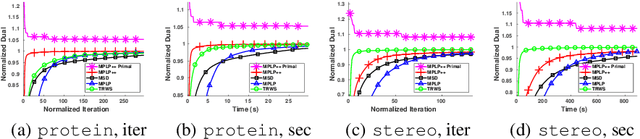
Dense, discrete Graphical Models with pairwise potentials are a powerful class of models which are employed in state-of-the-art computer vision and bio-imaging applications. This work introduces a new MAP-solver, based on the popular Dual Block-Coordinate Ascent principle. Surprisingly, by making a small change to the low-performing solver, the Max Product Linear Programming (MPLP) algorithm, we derive the new solver MPLP++ that significantly outperforms all existing solvers by a large margin, including the state-of-the-art solver Tree-Reweighted Sequential (TRWS) message-passing algorithm. Additionally, our solver is highly parallel, in contrast to TRWS, which gives a further boost in performance with the proposed GPU and multi-thread CPU implementations. We verify the superiority of our algorithm on dense problems from publicly available benchmarks, as well, as a new benchmark for 6D Object Pose estimation. We also provide an ablation study with respect to graph density.
Taxonomy of Dual Block-Coordinate Ascent Methods for Discrete Energy Minimization
Apr 16, 2020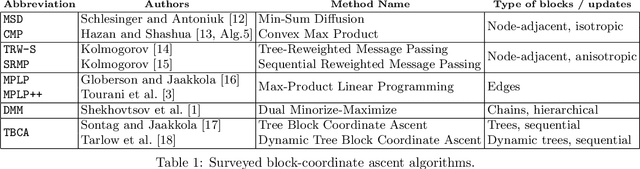
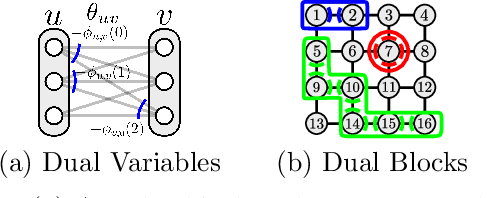
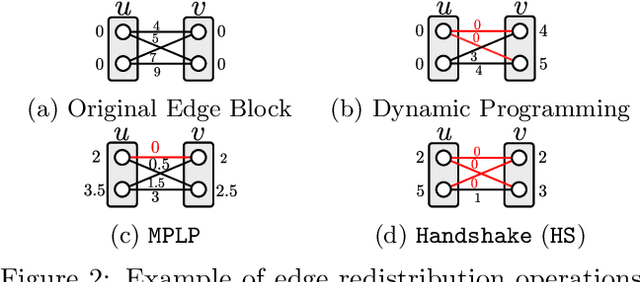
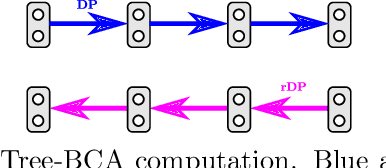
We consider the maximum-a-posteriori inference problem in discrete graphical models and study solvers based on the dual block-coordinate ascent rule. We map all existing solvers in a single framework, allowing for a better understanding of their design principles. We theoretically show that some block-optimizing updates are sub-optimal and how to strictly improve them. On a wide range of problem instances of varying graph connectivity, we study the performance of existing solvers as well as new variants that can be obtained within the framework. As a result of this exploration we build a new state-of-the art solver, performing uniformly better on the whole range of test instances.