 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLoViF 2026 Challenge on Human-oriented Semantic Image Quality Assessment: Methods and Results
Apr 13, 2026This paper reviews the LoViF 2026 Challenge on Human-oriented Semantic Image Quality Assessment. This challenge aims to raise a new direction, i.e., how to evaluate the loss of semantic information from the human perspective, intending to promote the development of some new directions, like semantic coding, processing, and semantic-oriented optimization, etc. Unlike existing datasets of quality assessment, we form a dataset of human-oriented semantic quality assessment, termed the SeIQA dataset. This dataset is divided into three parts for this competition: (i) training data: 510 pairs of degraded images and their corresponding ground truth references; (ii) validation data: 80 pairs of degraded images and their corresponding ground-truth references; (iii) testing data: 160 pairs of degraded images and their corresponding ground-truth references. The primary objective of this challenge is to establish a new and powerful benchmark for human-oriented semantic image quality assessment. There are a total of 58 teams registered in this competition, and 6 teams submitted valid solutions and fact sheets for the final testing phase. These submissions achieved state-of-the-art (SOTA) performance on the SeIQA dataset.
Assessing Multimodal Chronic Wound Embeddings with Expert Triplet Agreement
Apr 02, 2026Recessive dystrophic epidermolysis bullosa (RDEB) is a rare genetic skin disorder for which clinicians greatly benefit from finding similar cases using images and clinical text. However, off-the-shelf foundation models do not reliably capture clinically meaningful features for this heterogeneous, long-tail disease, and structured measurement of agreement with experts is challenging. To address these gaps, we propose evaluating embedding spaces with expert ordinal comparisons (triplet judgments), which are fast to collect and encode implicit clinical similarity knowledge. We further introduce TriDerm, a multimodal framework that learns interpretable wound representations from small cohorts by integrating wound imagery, boundary masks, and expert reports. On the vision side, TriDerm adapts visual foundation models to RDEB using wound-level attention pooling and non-contrastive representation learning. For text, we prompt large language models with comparison queries and recover medically meaningful representations via soft ordinal embeddings (SOE). We show that visual and textual modalities capture complementary aspects of wound phenotype, and that fusing both modalities yields 73.5% agreement with experts, outperforming the best off-the-shelf single-modality foundation model by over 5.6 percentage points. We make the expert annotation tool, model code and representative dataset samples publicly available.
Polysemantic Dropout: Conformal OOD Detection for Specialized LLMs
Sep 04, 2025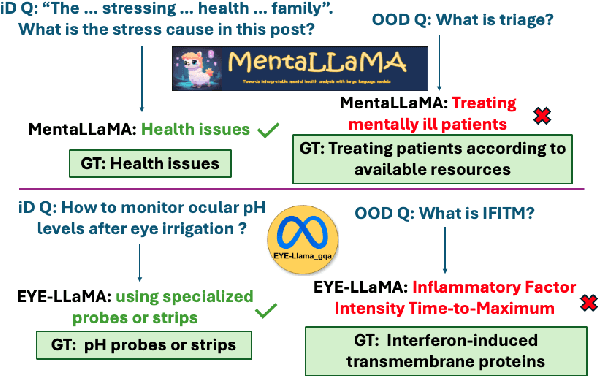

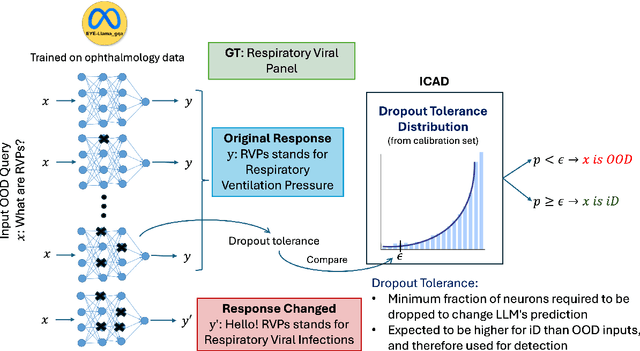

We propose a novel inference-time out-of-domain (OOD) detection algorithm for specialized large language models (LLMs). Despite achieving state-of-the-art performance on in-domain tasks through fine-tuning, specialized LLMs remain vulnerable to incorrect or unreliable outputs when presented with OOD inputs, posing risks in critical applications. Our method leverages the Inductive Conformal Anomaly Detection (ICAD) framework, using a new non-conformity measure based on the model's dropout tolerance. Motivated by recent findings on polysemanticity and redundancy in LLMs, we hypothesize that in-domain inputs exhibit higher dropout tolerance than OOD inputs. We aggregate dropout tolerance across multiple layers via a valid ensemble approach, improving detection while maintaining theoretical false alarm bounds from ICAD. Experiments with medical-specialized LLMs show that our approach detects OOD inputs better than baseline methods, with AUROC improvements of $2\%$ to $37\%$ when treating OOD datapoints as positives and in-domain test datapoints as negatives.
TOGA: Temporally Grounded Open-Ended Video QA with Weak Supervision
Jun 11, 2025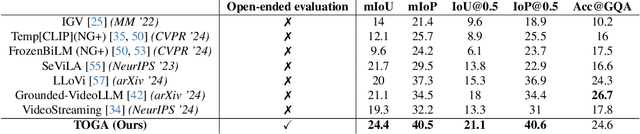
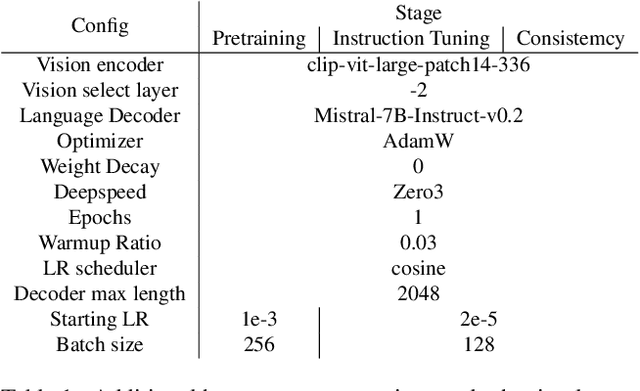
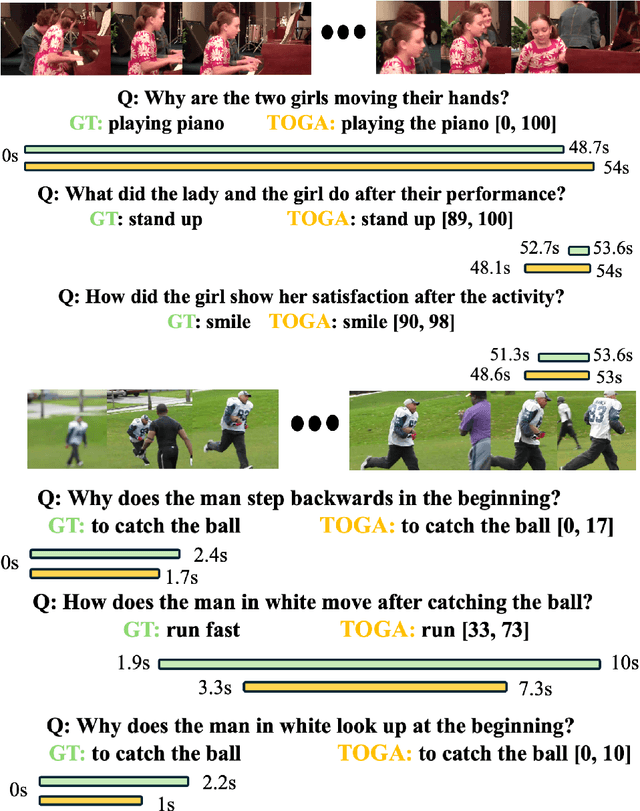
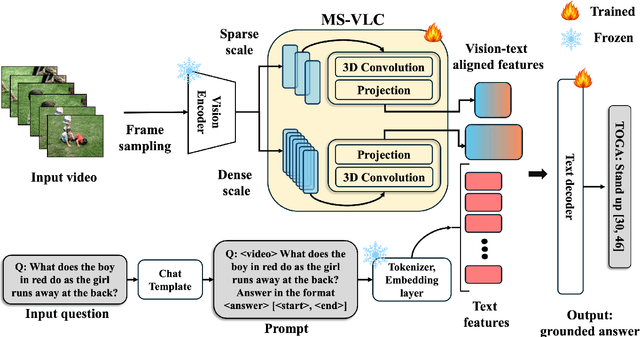
We address the problem of video question answering (video QA) with temporal grounding in a weakly supervised setup, without any temporal annotations. Given a video and a question, we generate an open-ended answer grounded with the start and end time. For this task, we propose TOGA: a vision-language model for Temporally Grounded Open-Ended Video QA with Weak Supervision. We instruct-tune TOGA to jointly generate the answer and the temporal grounding. We operate in a weakly supervised setup where the temporal grounding annotations are not available. We generate pseudo labels for temporal grounding and ensure the validity of these labels by imposing a consistency constraint between the question of a grounding response and the response generated by a question referring to the same temporal segment. We notice that jointly generating the answers with the grounding improves performance on question answering as well as grounding. We evaluate TOGA on grounded QA and open-ended QA tasks. For grounded QA, we consider the NExT-GQA benchmark which is designed to evaluate weakly supervised grounded question answering. For open-ended QA, we consider the MSVD-QA and ActivityNet-QA benchmarks. We achieve state-of-the-art performance for both tasks on these benchmarks.
MimicGait: A Model Agnostic approach for Occluded Gait Recognition using Correlational Knowledge Distillation
Jan 26, 2025Gait recognition is an important biometric technique over large distances. State-of-the-art gait recognition systems perform very well in controlled environments at close range. Recently, there has been an increased interest in gait recognition in the wild prompted by the collection of outdoor, more challenging datasets containing variations in terms of illumination, pitch angles, and distances. An important problem in these environments is that of occlusion, where the subject is partially blocked from camera view. While important, this problem has received little attention. Thus, we propose MimicGait, a model-agnostic approach for gait recognition in the presence of occlusions. We train the network using a multi-instance correlational distillation loss to capture both inter-sequence and intra-sequence correlations in the occluded gait patterns of a subject, utilizing an auxiliary Visibility Estimation Network to guide the training of the proposed mimic network. We demonstrate the effectiveness of our approach on challenging real-world datasets like GREW, Gait3D and BRIAR. We release the code in https://github.com/Ayush-00/mimicgait.
Question Answering on Patient Medical Records with Private Fine-Tuned LLMs
Jan 23, 2025Healthcare systems continuously generate vast amounts of electronic health records (EHRs), commonly stored in the Fast Healthcare Interoperability Resources (FHIR) standard. Despite the wealth of information in these records, their complexity and volume make it difficult for users to retrieve and interpret crucial health insights. Recent advances in Large Language Models (LLMs) offer a solution, enabling semantic question answering (QA) over medical data, allowing users to interact with their health records more effectively. However, ensuring privacy and compliance requires edge and private deployments of LLMs. This paper proposes a novel approach to semantic QA over EHRs by first identifying the most relevant FHIR resources for a user query (Task1) and subsequently answering the query based on these resources (Task2). We explore the performance of privately hosted, fine-tuned LLMs, evaluating them against benchmark models such as GPT-4 and GPT-4o. Our results demonstrate that fine-tuned LLMs, while 250x smaller in size, outperform GPT-4 family models by 0.55% in F1 score on Task1 and 42% on Meteor Task in Task2. Additionally, we examine advanced aspects of LLM usage, including sequential fine-tuning, model self-evaluation (narcissistic evaluation), and the impact of training data size on performance. The models and datasets are available here: https://huggingface.co/genloop
You Can Run but not Hide: Improving Gait Recognition with Intrinsic Occlusion Type Awareness
Dec 04, 2023While gait recognition has seen many advances in recent years, the occlusion problem has largely been ignored. This problem is especially important for gait recognition from uncontrolled outdoor sequences at range - since any small obstruction can affect the recognition system. Most current methods assume the availability of complete body information while extracting the gait features. When parts of the body are occluded, these methods may hallucinate and output a corrupted gait signature as they try to look for body parts which are not present in the input at all. To address this, we exploit the learned occlusion type while extracting identity features from videos. Thus, in this work, we propose an occlusion aware gait recognition method which can be used to model intrinsic occlusion awareness into potentially any state-of-the-art gait recognition method. Our experiments on the challenging GREW and BRIAR datasets show that networks enhanced with this occlusion awareness perform better at recognition tasks than their counterparts trained on similar occlusions.
DroneARchery: Human-Drone Interaction through Augmented Reality with Haptic Feedback and Multi-UAV Collision Avoidance Driven by Deep Reinforcement Learning
Oct 14, 2022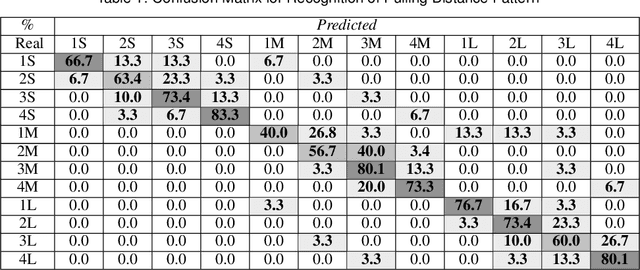
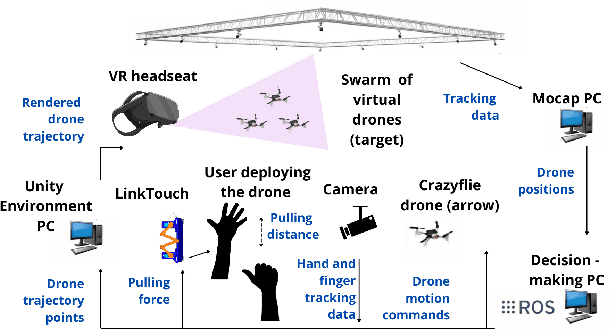
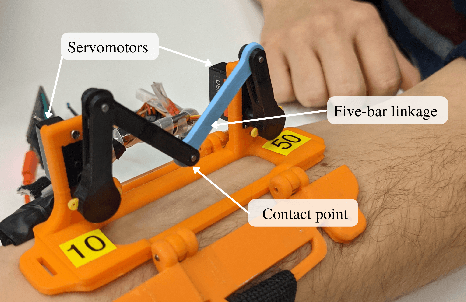
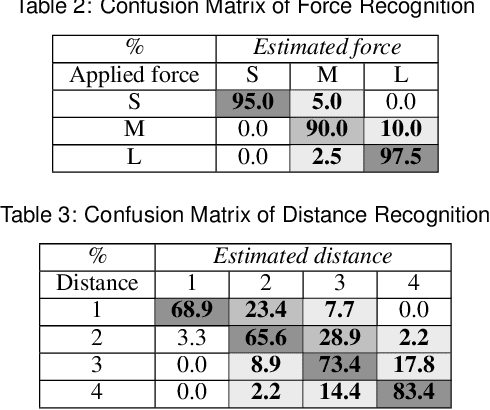
We propose a novel concept of augmented reality (AR) human-drone interaction driven by RL-based swarm behavior to achieve intuitive and immersive control of a swarm formation of unmanned aerial vehicles. The DroneARchery system developed by us allows the user to quickly deploy a swarm of drones, generating flight paths simulating archery. The haptic interface LinkGlide delivers a tactile stimulus of the bowstring tension to the forearm to increase the precision of aiming. The swarm of released drones dynamically avoids collisions between each other, the drone following the user, and external obstacles with behavior control based on deep reinforcement learning. The developed concept was tested in the scenario with a human, where the user shoots from a virtual bow with a real drone to hit the target. The human operator observes the ballistic trajectory of the drone in an AR and achieves a realistic and highly recognizable experience of the bowstring tension through the haptic display. The experimental results revealed that the system improves trajectory prediction accuracy by 63.3% through applying AR technology and conveying haptic feedback of pulling force. DroneARchery users highlighted the naturalness (4.3 out of 5 point Likert scale) and increased confidence (4.7 out of 5) when controlling the drone. We have designed the tactile patterns to present four sliding distances (tension) and three applied force levels (stiffness) of the haptic display. Users demonstrated the ability to distinguish tactile patterns produced by the haptic display representing varying bowstring tension(average recognition rate is of 72.8%) and stiffness (average recognition rate is of 94.2%). The novelty of the research is the development of an AR-based approach for drone control that does not require special skills and training from the operator.
SwarMan: Anthropomorphic Swarm of Drones Avatar with Body Tracking and Deep Learning-Based Gesture Recognition
Oct 04, 2022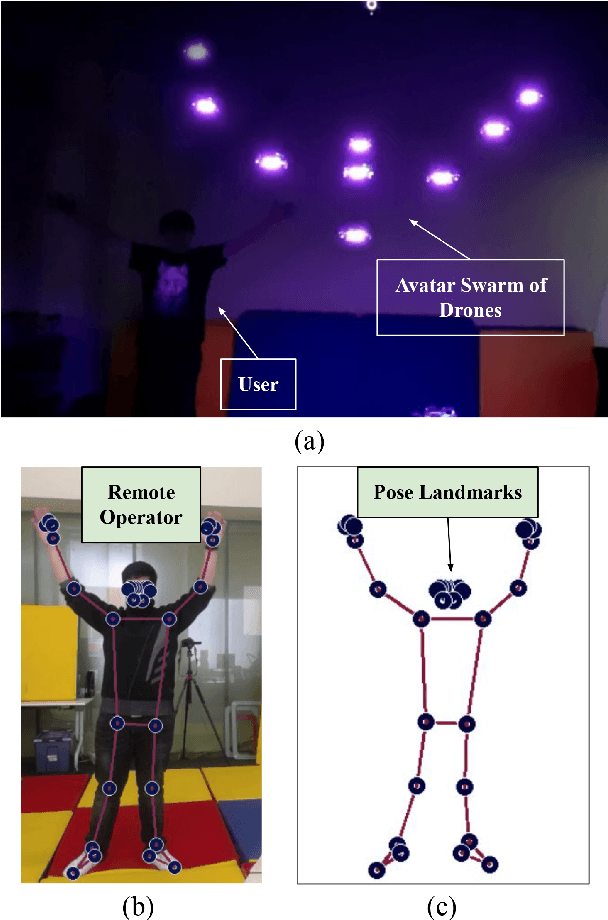
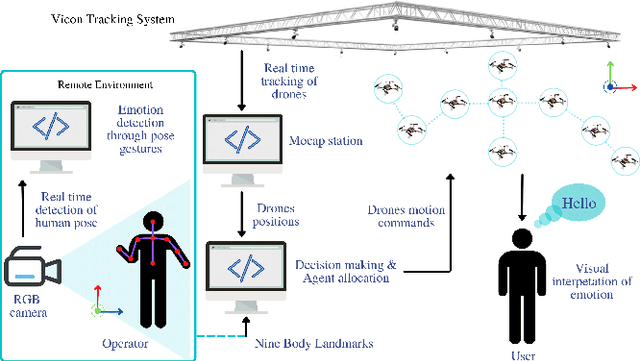
Anthropomorphic robot avatars present a conceptually novel approach to remote affective communication, allowing people across the world a wider specter of emotional and social exchanges over traditional 2D and 3D image data. However, there are several limitations of current telepresence robots, such as the high weight, complexity of the system that prevents its fast deployment, and the limited workspace of the avatars mounted on either static or wheeled mobile platforms. In this paper, we present a novel concept of telecommunication through a robot avatar based on an anthropomorphic swarm of drones; SwarMan. The developed system consists of nine nanocopters controlled remotely by the operator through a gesture recognition interface. SwarMan allows operators to communicate by directly following their motions and by recognizing one of the prerecorded emotional patterns, thus rendering the captured emotion as illumination on the drones. The LSTM MediaPipe network was trained on a collected dataset of 600 short videos with five emotional gestures. The accuracy of achieved emotion recognition was 97% on the test dataset. As communication through the swarm avatar significantly changes the visual appearance of the operator, we investigated the ability of the users to recognize and respond to emotions performed by the swarm of drones. The experimental results revealed a high consistency between the users in rating emotions. Additionally, users indicated low physical demand (2.25 on the Likert scale) and were satisfied with their performance (1.38 on the Likert scale) when communicating by the SwarMan interface.
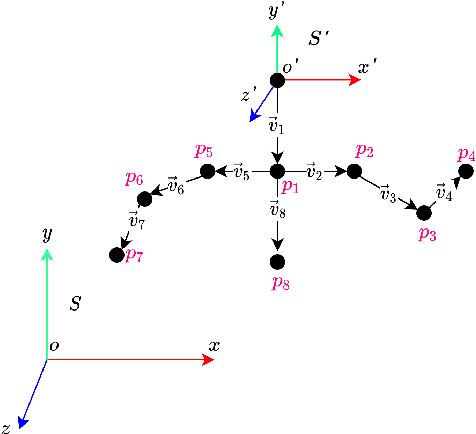
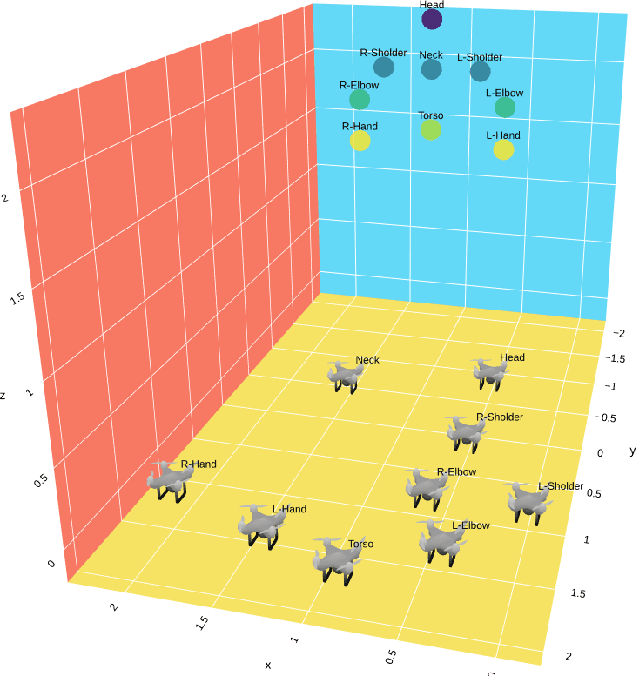
DandelionTouch: High Fidelity Haptic Rendering of Soft Objects in VR by a Swarm of Drones
Sep 22, 2022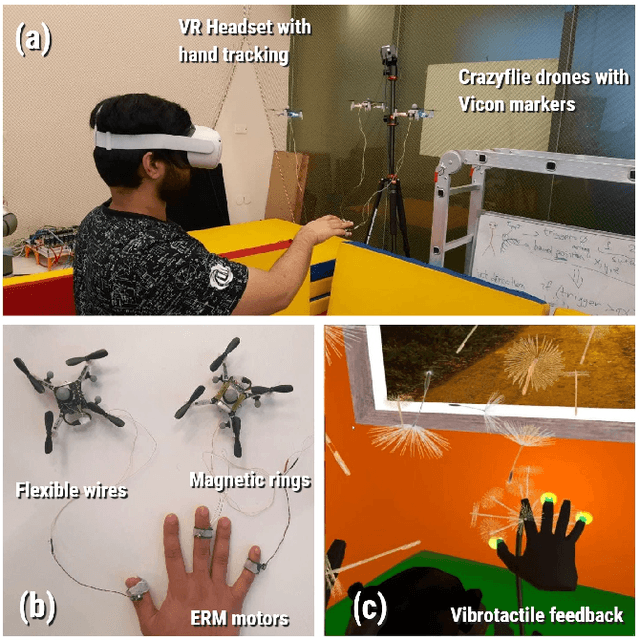
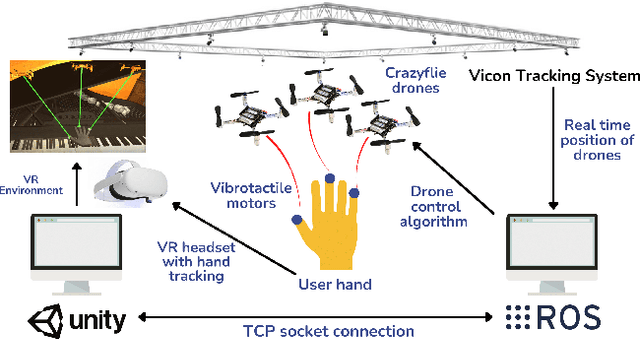
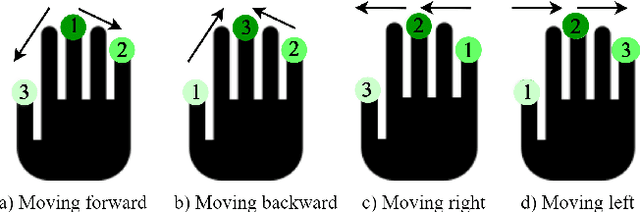
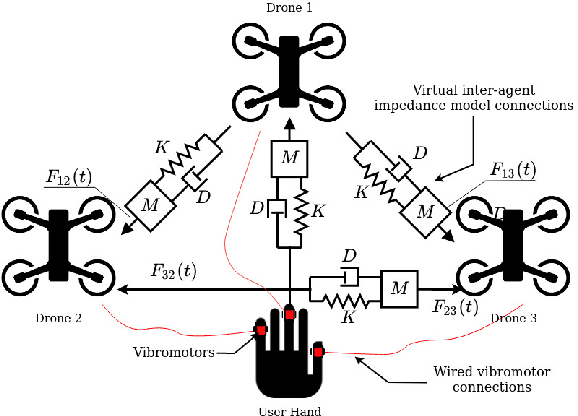
To achieve high fidelity haptic rendering of soft objects in a high mobility virtual environment, we propose a novel haptic display DandelionTouch. The tactile actuators are delivered to the fingertips of the user by a swarm of drones. Users of DandelionTouch are capable of experiencing tactile feedback in a large space that is not limited by the device's working area. Importantly, they will not experience muscle fatigue during long interactions with virtual objects. Hand tracking and swarm control algorithm allow guiding the swarm with hand motions and avoid collisions inside the formation. Several topologies of the impedance connection between swarm units were investigated in this research. The experiment, in which drones performed a point following task on a square trajectory in real-time, revealed that drones connected in a Star topology performed the trajectory with low mean positional error (RMSE decreased by 20.6% in comparison with other impedance topologies and by 40.9% in comparison with potential field-based swarm control). The achieved velocities of the drones in all formations with impedance behavior were 28% higher than for the swarm controlled with the potential field algorithm. Additionally, the perception of several vibrotactile patterns was evaluated in a user study with 7 participants. The study has shown that the proposed combination of temporal delay and frequency modulation allows users to successfully recognize the surface property and motion direction in VR simultaneously (mean recognition rate of 70%, maximum of 93%). DandelionTouch suggests a new type of haptic feedback in VR systems where no hand-held or wearable interface is required.