 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDroneARchery: Human-Drone Interaction through Augmented Reality with Haptic Feedback and Multi-UAV Collision Avoidance Driven by Deep Reinforcement Learning
Oct 14, 2022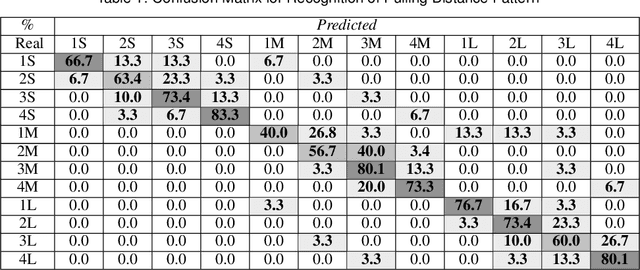
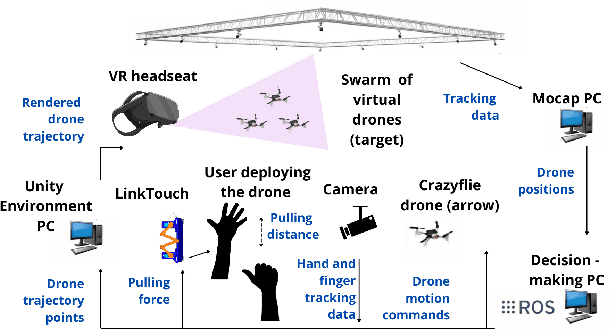
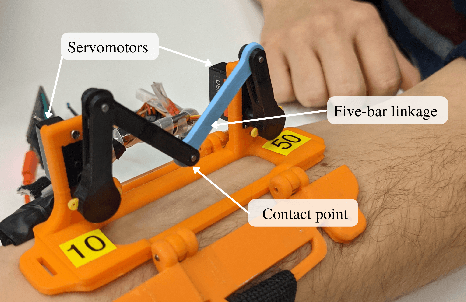
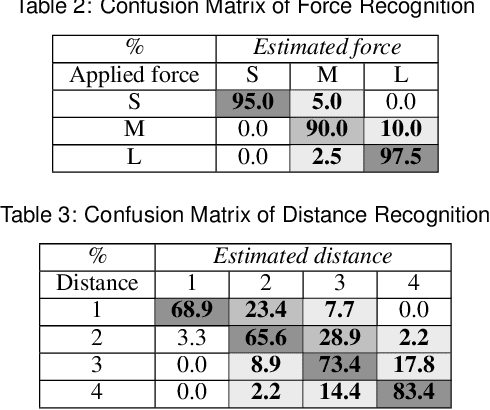
We propose a novel concept of augmented reality (AR) human-drone interaction driven by RL-based swarm behavior to achieve intuitive and immersive control of a swarm formation of unmanned aerial vehicles. The DroneARchery system developed by us allows the user to quickly deploy a swarm of drones, generating flight paths simulating archery. The haptic interface LinkGlide delivers a tactile stimulus of the bowstring tension to the forearm to increase the precision of aiming. The swarm of released drones dynamically avoids collisions between each other, the drone following the user, and external obstacles with behavior control based on deep reinforcement learning. The developed concept was tested in the scenario with a human, where the user shoots from a virtual bow with a real drone to hit the target. The human operator observes the ballistic trajectory of the drone in an AR and achieves a realistic and highly recognizable experience of the bowstring tension through the haptic display. The experimental results revealed that the system improves trajectory prediction accuracy by 63.3% through applying AR technology and conveying haptic feedback of pulling force. DroneARchery users highlighted the naturalness (4.3 out of 5 point Likert scale) and increased confidence (4.7 out of 5) when controlling the drone. We have designed the tactile patterns to present four sliding distances (tension) and three applied force levels (stiffness) of the haptic display. Users demonstrated the ability to distinguish tactile patterns produced by the haptic display representing varying bowstring tension(average recognition rate is of 72.8%) and stiffness (average recognition rate is of 94.2%). The novelty of the research is the development of an AR-based approach for drone control that does not require special skills and training from the operator.
SwarMan: Anthropomorphic Swarm of Drones Avatar with Body Tracking and Deep Learning-Based Gesture Recognition
Oct 04, 2022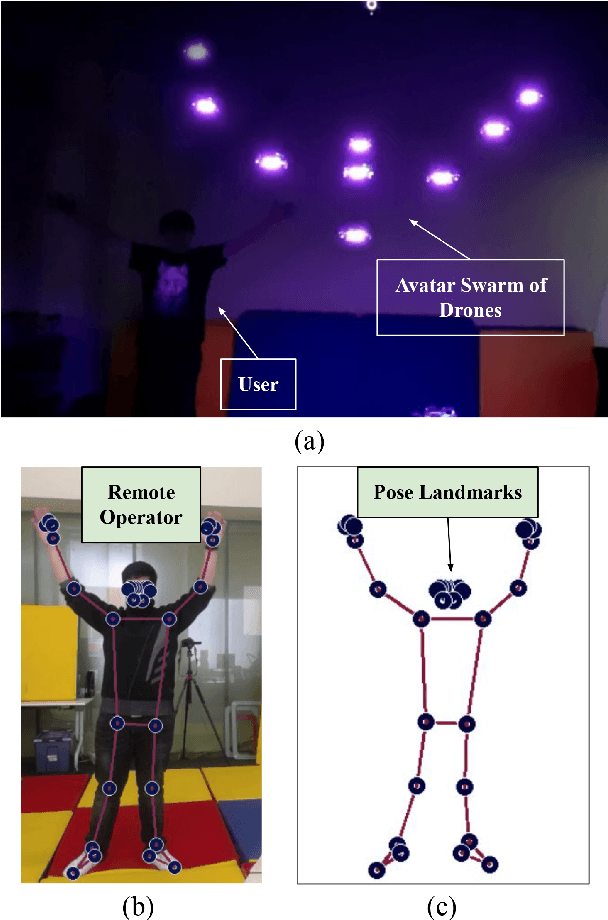
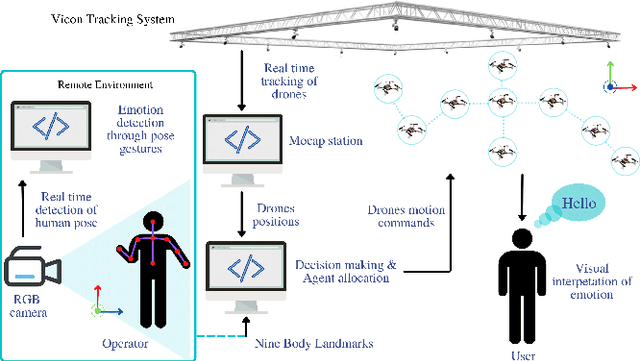
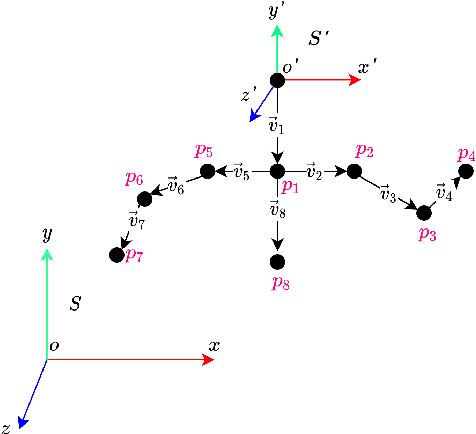
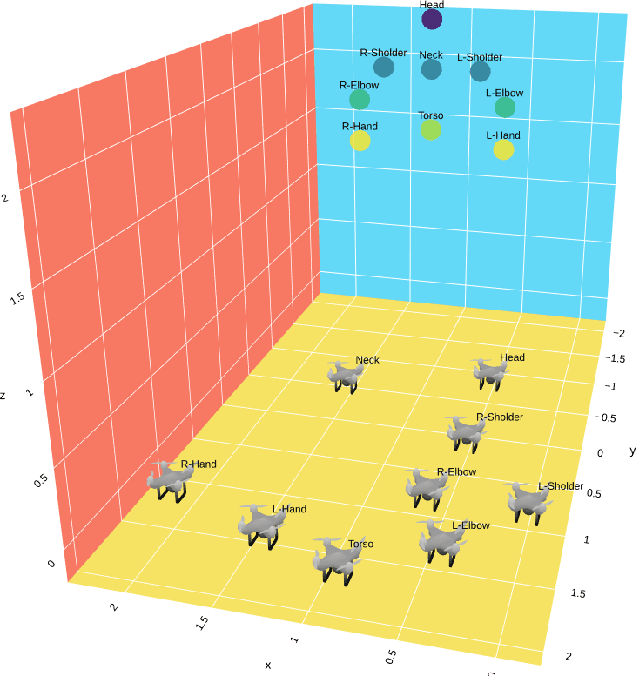
Anthropomorphic robot avatars present a conceptually novel approach to remote affective communication, allowing people across the world a wider specter of emotional and social exchanges over traditional 2D and 3D image data. However, there are several limitations of current telepresence robots, such as the high weight, complexity of the system that prevents its fast deployment, and the limited workspace of the avatars mounted on either static or wheeled mobile platforms. In this paper, we present a novel concept of telecommunication through a robot avatar based on an anthropomorphic swarm of drones; SwarMan. The developed system consists of nine nanocopters controlled remotely by the operator through a gesture recognition interface. SwarMan allows operators to communicate by directly following their motions and by recognizing one of the prerecorded emotional patterns, thus rendering the captured emotion as illumination on the drones. The LSTM MediaPipe network was trained on a collected dataset of 600 short videos with five emotional gestures. The accuracy of achieved emotion recognition was 97% on the test dataset. As communication through the swarm avatar significantly changes the visual appearance of the operator, we investigated the ability of the users to recognize and respond to emotions performed by the swarm of drones. The experimental results revealed a high consistency between the users in rating emotions. Additionally, users indicated low physical demand (2.25 on the Likert scale) and were satisfied with their performance (1.38 on the Likert scale) when communicating by the SwarMan interface.
DandelionTouch: High Fidelity Haptic Rendering of Soft Objects in VR by a Swarm of Drones
Sep 22, 2022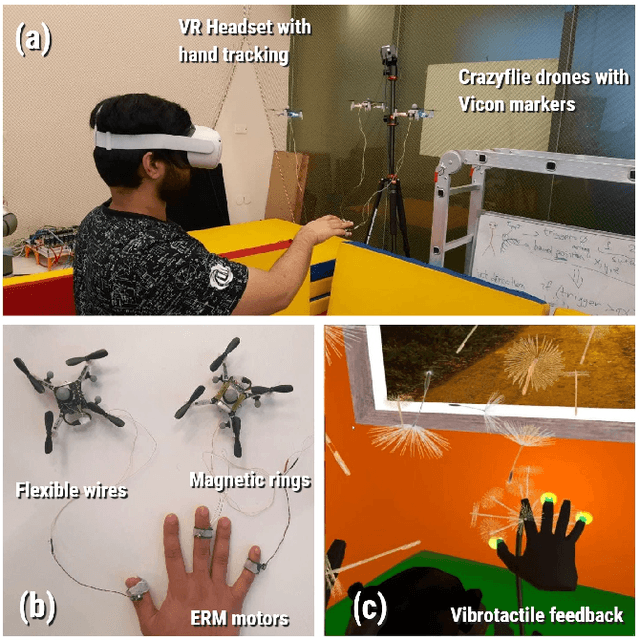
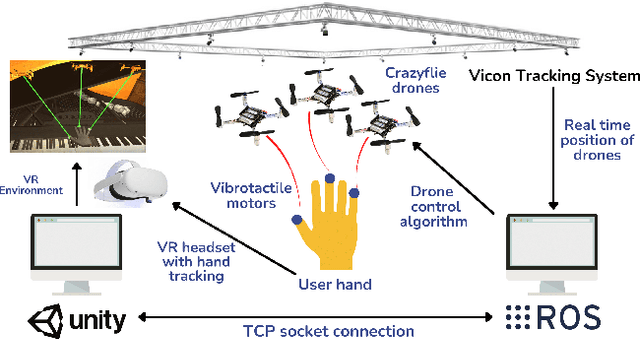
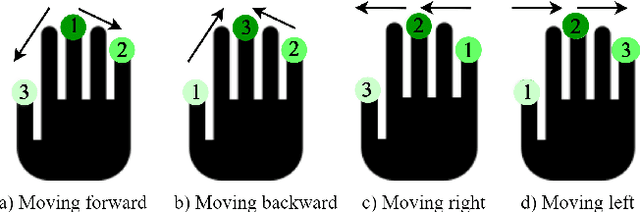
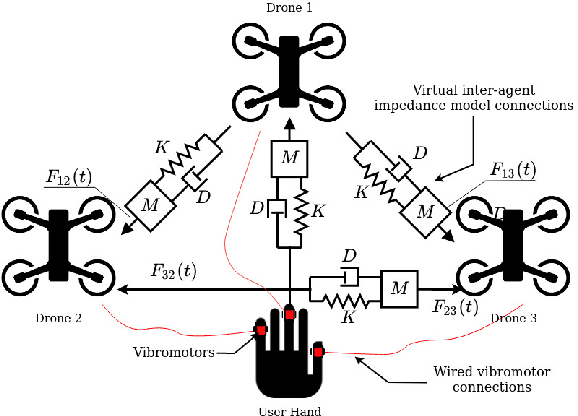
To achieve high fidelity haptic rendering of soft objects in a high mobility virtual environment, we propose a novel haptic display DandelionTouch. The tactile actuators are delivered to the fingertips of the user by a swarm of drones. Users of DandelionTouch are capable of experiencing tactile feedback in a large space that is not limited by the device's working area. Importantly, they will not experience muscle fatigue during long interactions with virtual objects. Hand tracking and swarm control algorithm allow guiding the swarm with hand motions and avoid collisions inside the formation. Several topologies of the impedance connection between swarm units were investigated in this research. The experiment, in which drones performed a point following task on a square trajectory in real-time, revealed that drones connected in a Star topology performed the trajectory with low mean positional error (RMSE decreased by 20.6% in comparison with other impedance topologies and by 40.9% in comparison with potential field-based swarm control). The achieved velocities of the drones in all formations with impedance behavior were 28% higher than for the swarm controlled with the potential field algorithm. Additionally, the perception of several vibrotactile patterns was evaluated in a user study with 7 participants. The study has shown that the proposed combination of temporal delay and frequency modulation allows users to successfully recognize the surface property and motion direction in VR simultaneously (mean recognition rate of 70%, maximum of 93%). DandelionTouch suggests a new type of haptic feedback in VR systems where no hand-held or wearable interface is required.
SwarmHawk: Self-Sustaining Multi-Agent System for Landing on a Moving Platform through an Agent Supervision
Jun 17, 2022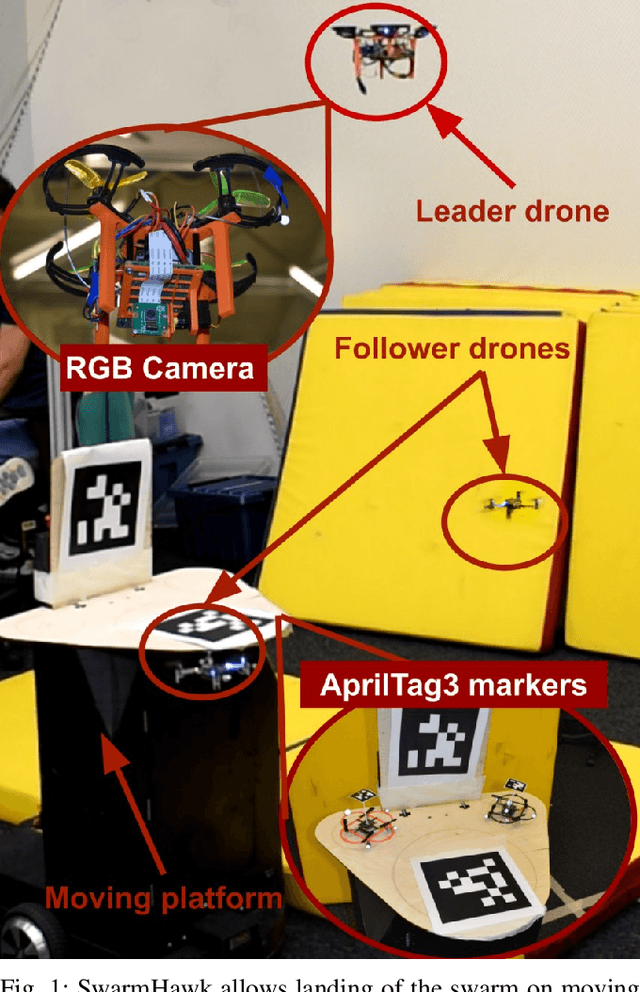

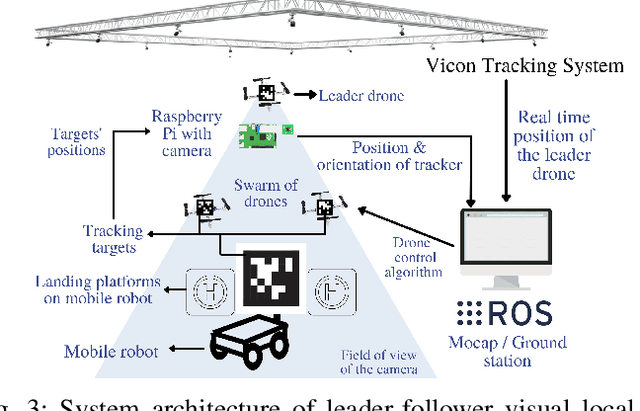
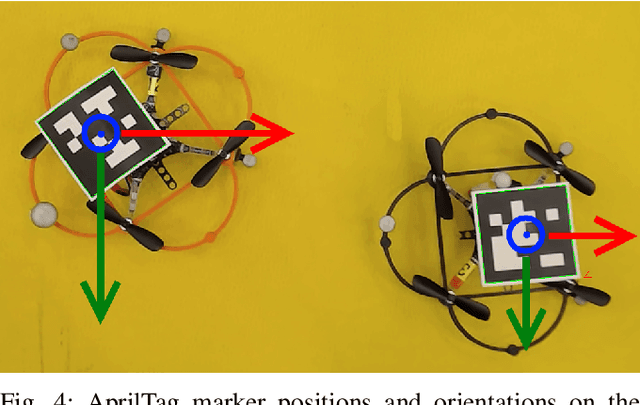
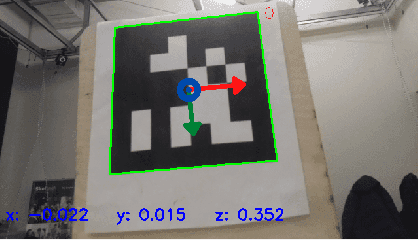
Heterogeneous teams of mobile robots and UAVs are offering a substantial benefit in an autonomous exploration of the environment. Nevertheless, although joint exploration scenarios for such systems are widely discussed, they are still suffering from low adaptability to changes in external conditions and faults of swarm agents during the UAV docking. We propose a novel vision-based drone swarm docking system for robust landing on a moving platform when one of the agents lost its position signal. The proposed SwarmHawk system relies on vision-based detection for the mobile platform tracking and navigation of its agents. Each drone of the swarm carries an RGB camera and AprilTag3 QR-code marker on board. SwarmHawk can switch between two modes of operation, acting as a homogeneous swarm in case of global UAV localization or assigning leader drones to navigate its neighbors in case of a camera fault in one of the drones or global localization failure. Two experiments were performed to evaluate SwarmHawk's performance under the global and local localization with static and moving platforms. The experimental results revealed a sufficient accuracy in the swarm landing task on a static mobile platform (error of 4.2 cm in homogeneous formation and 1.9 cm in leader-follower formation) and on moving platform (error of 6.9 cm in homogeneous formation and 4.7 cm in leader-follower formation). Moreover, the drones showed a good landing on a platform moving along a complex trajectory (average error of 19.4 cm) in leader-follower formation. The proposed SwarmHawk technology can be potentially applied in various swarm scenarios, including complex environment exploration, inspection, and drone delivery.
SwarmHive: Heterogeneous Swarm of Drones for Robust Autonomous Landing on Moving Robot
Jun 17, 2022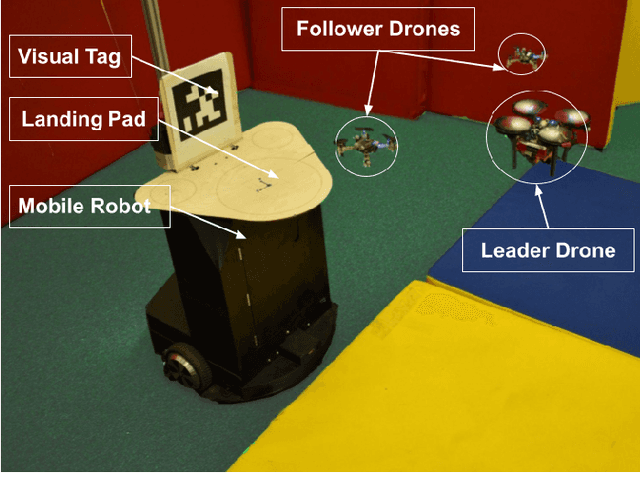
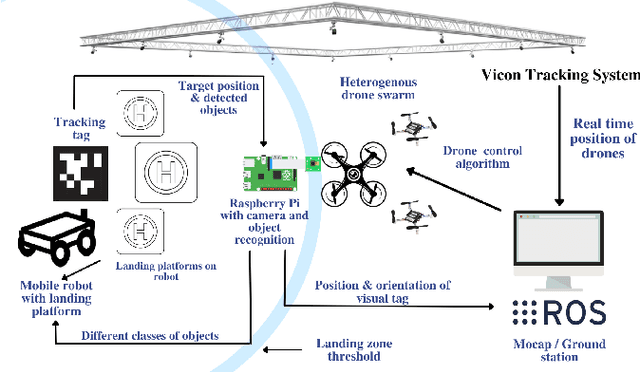
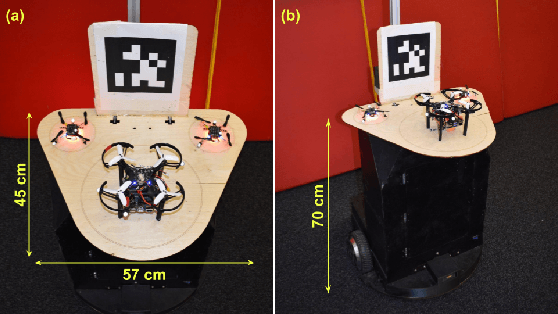
The paper focuses on a heterogeneous swarm of drones to achieve a dynamic landing of formation on a moving robot. This challenging task was not yet achieved by scientists. The key technology is that instead of facilitating each agent of the swarm of drones with computer vision that considerably increases the payload and shortens the flight time, we propose to install only one camera on the leader drone. The follower drones receive the commands from the leader UAV and maintain a collision-free trajectory with the artificial potential field. The experimental results revealed a high accuracy of the swarm landing on a static mobile platform (RMSE of 4.48 cm). RMSE of swarm landing on the mobile platform moving with the maximum velocities of 1.0 m/s and 1.5 m/s equals 8.76 cm and 8.98 cm, respectively. The proposed SwarmHive technology will allow the time-saving landing of the swarm for further drone recharging. This will make it possible to achieve self-sustainable operation of a multi-agent robotic system for such scenarios as rescue operations, inspection and maintenance, autonomous warehouse inventory, cargo delivery, and etc.