 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSwarmHawk: Self-Sustaining Multi-Agent System for Landing on a Moving Platform through an Agent Supervision
Paper and Code
Jun 17, 2022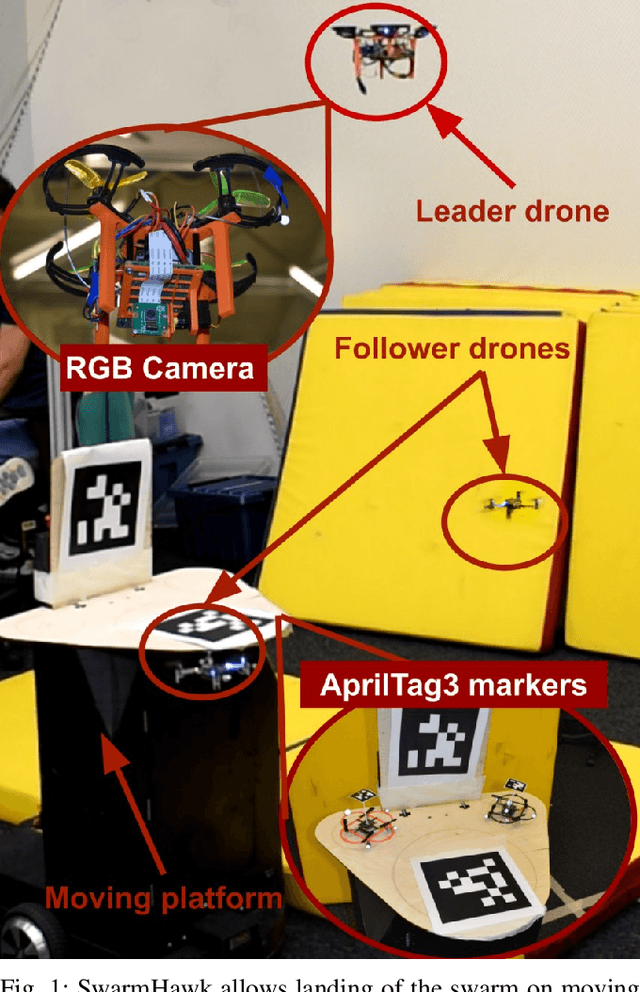

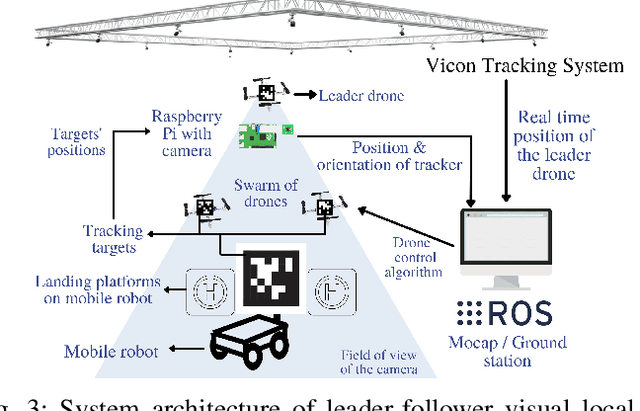
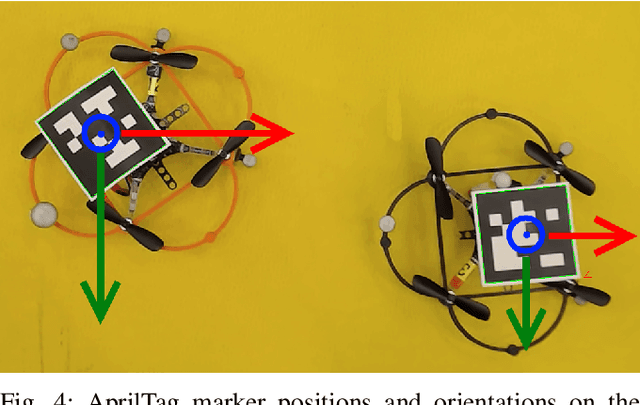
Heterogeneous teams of mobile robots and UAVs are offering a substantial benefit in an autonomous exploration of the environment. Nevertheless, although joint exploration scenarios for such systems are widely discussed, they are still suffering from low adaptability to changes in external conditions and faults of swarm agents during the UAV docking. We propose a novel vision-based drone swarm docking system for robust landing on a moving platform when one of the agents lost its position signal. The proposed SwarmHawk system relies on vision-based detection for the mobile platform tracking and navigation of its agents. Each drone of the swarm carries an RGB camera and AprilTag3 QR-code marker on board. SwarmHawk can switch between two modes of operation, acting as a homogeneous swarm in case of global UAV localization or assigning leader drones to navigate its neighbors in case of a camera fault in one of the drones or global localization failure. Two experiments were performed to evaluate SwarmHawk's performance under the global and local localization with static and moving platforms. The experimental results revealed a sufficient accuracy in the swarm landing task on a static mobile platform (error of 4.2 cm in homogeneous formation and 1.9 cm in leader-follower formation) and on moving platform (error of 6.9 cm in homogeneous formation and 4.7 cm in leader-follower formation). Moreover, the drones showed a good landing on a platform moving along a complex trajectory (average error of 19.4 cm) in leader-follower formation. The proposed SwarmHawk technology can be potentially applied in various swarm scenarios, including complex environment exploration, inspection, and drone delivery.