 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDroneARchery: Human-Drone Interaction through Augmented Reality with Haptic Feedback and Multi-UAV Collision Avoidance Driven by Deep Reinforcement Learning
Paper and Code
Oct 14, 2022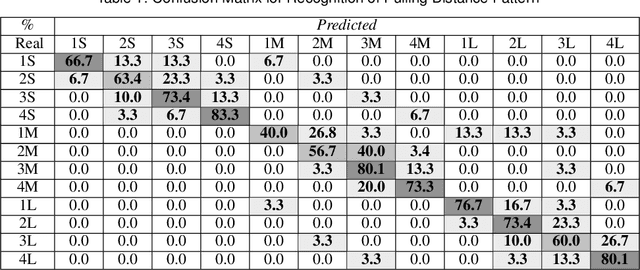
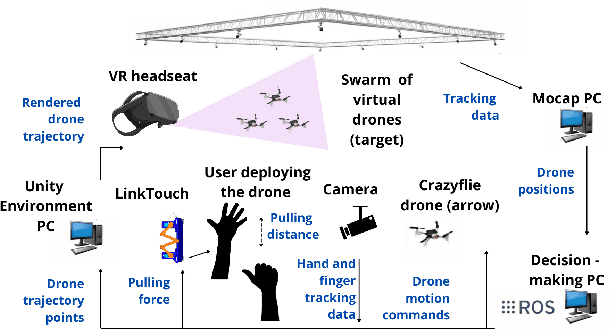
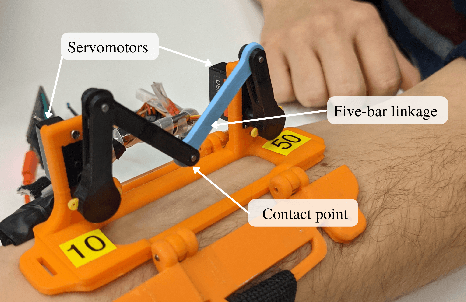
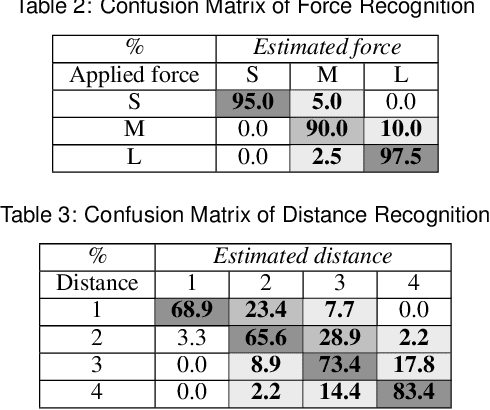
We propose a novel concept of augmented reality (AR) human-drone interaction driven by RL-based swarm behavior to achieve intuitive and immersive control of a swarm formation of unmanned aerial vehicles. The DroneARchery system developed by us allows the user to quickly deploy a swarm of drones, generating flight paths simulating archery. The haptic interface LinkGlide delivers a tactile stimulus of the bowstring tension to the forearm to increase the precision of aiming. The swarm of released drones dynamically avoids collisions between each other, the drone following the user, and external obstacles with behavior control based on deep reinforcement learning. The developed concept was tested in the scenario with a human, where the user shoots from a virtual bow with a real drone to hit the target. The human operator observes the ballistic trajectory of the drone in an AR and achieves a realistic and highly recognizable experience of the bowstring tension through the haptic display. The experimental results revealed that the system improves trajectory prediction accuracy by 63.3% through applying AR technology and conveying haptic feedback of pulling force. DroneARchery users highlighted the naturalness (4.3 out of 5 point Likert scale) and increased confidence (4.7 out of 5) when controlling the drone. We have designed the tactile patterns to present four sliding distances (tension) and three applied force levels (stiffness) of the haptic display. Users demonstrated the ability to distinguish tactile patterns produced by the haptic display representing varying bowstring tension(average recognition rate is of 72.8%) and stiffness (average recognition rate is of 94.2%). The novelty of the research is the development of an AR-based approach for drone control that does not require special skills and training from the operator.