 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSwarmHive: Heterogeneous Swarm of Drones for Robust Autonomous Landing on Moving Robot
Jun 17, 2022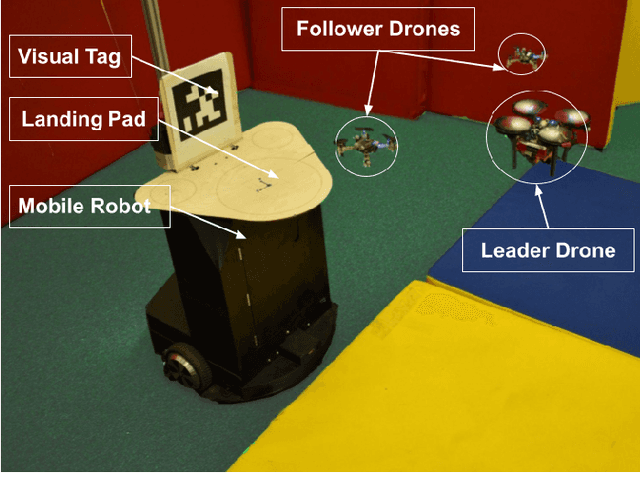
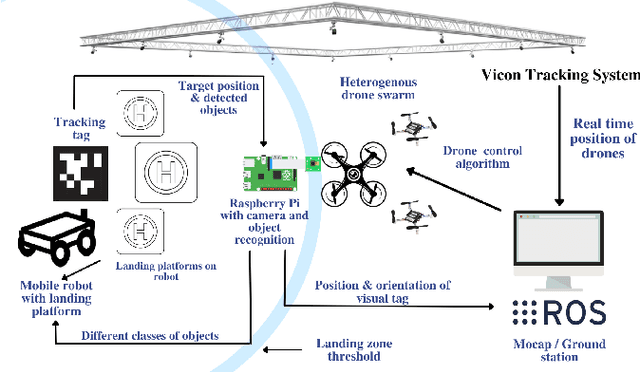
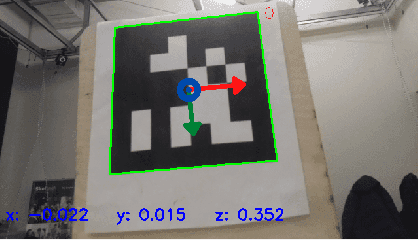
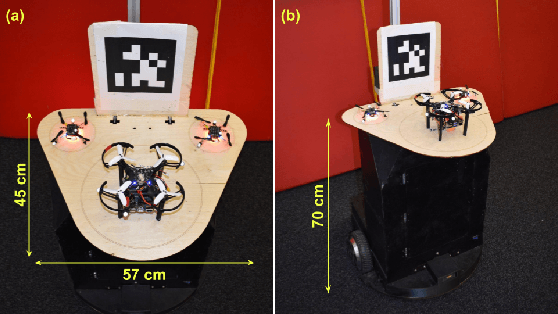
The paper focuses on a heterogeneous swarm of drones to achieve a dynamic landing of formation on a moving robot. This challenging task was not yet achieved by scientists. The key technology is that instead of facilitating each agent of the swarm of drones with computer vision that considerably increases the payload and shortens the flight time, we propose to install only one camera on the leader drone. The follower drones receive the commands from the leader UAV and maintain a collision-free trajectory with the artificial potential field. The experimental results revealed a high accuracy of the swarm landing on a static mobile platform (RMSE of 4.48 cm). RMSE of swarm landing on the mobile platform moving with the maximum velocities of 1.0 m/s and 1.5 m/s equals 8.76 cm and 8.98 cm, respectively. The proposed SwarmHive technology will allow the time-saving landing of the swarm for further drone recharging. This will make it possible to achieve self-sustainable operation of a multi-agent robotic system for such scenarios as rescue operations, inspection and maintenance, autonomous warehouse inventory, cargo delivery, and etc.