 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Turbulent Flows with Generative Models: Super-resolution, Forecasting, and Sparse Flow Reconstruction
Sep 10, 2025



Neural operators are promising surrogates for dynamical systems but when trained with standard L2 losses they tend to oversmooth fine-scale turbulent structures. Here, we show that combining operator learning with generative modeling overcomes this limitation. We consider three practical turbulent-flow challenges where conventional neural operators fail: spatio-temporal super-resolution, forecasting, and sparse flow reconstruction. For Schlieren jet super-resolution, an adversarially trained neural operator (adv-NO) reduces the energy-spectrum error by 15x while preserving sharp gradients at neural operator-like inference cost. For 3D homogeneous isotropic turbulence, adv-NO trained on only 160 timesteps from a single trajectory forecasts accurately for five eddy-turnover times and offers 114x wall-clock speed-up at inference than the baseline diffusion-based forecasters, enabling near-real-time rollouts. For reconstructing cylinder wake flows from highly sparse Particle Tracking Velocimetry-like inputs, a conditional generative model infers full 3D velocity and pressure fields with correct phase alignment and statistics. These advances enable accurate reconstruction and forecasting at low compute cost, bringing near-real-time analysis and control within reach in experimental and computational fluid mechanics. See our project page: https://vivekoommen.github.io/Gen4Turb/
Mitigating Spectral Bias in Neural Operators via High-Frequency Scaling for Physical Systems
Mar 17, 2025Neural operators have emerged as powerful surrogates for modeling complex physical problems. However, they suffer from spectral bias making them oblivious to high-frequency modes, which are present in multiscale physical systems. Therefore, they tend to produce over-smoothed solutions, which is particularly problematic in modeling turbulence and for systems with intricate patterns and sharp gradients such as multi-phase flow systems. In this work, we introduce a new approach named high-frequency scaling (HFS) to mitigate spectral bias in convolutional-based neural operators. By integrating HFS with proper variants of UNet neural operators, we demonstrate a higher prediction accuracy by mitigating spectral bias in single and two-phase flow problems. Unlike Fourier-based techniques, HFS is directly applied to the latent space, thus eliminating the computational cost associated with the Fourier transform. Additionally, we investigate alternative spectral bias mitigation through diffusion models conditioned on neural operators. While the diffusion model integrated with the standard neural operator may still suffer from significant errors, these errors are substantially reduced when the diffusion model is integrated with a HFS-enhanced neural operator.
XAI4Extremes: An interpretable machine learning framework for understanding extreme-weather precursors under climate change
Mar 11, 2025Extreme weather events are increasing in frequency and intensity due to climate change. This, in turn, is exacting a significant toll in communities worldwide. While prediction skills are increasing with advances in numerical weather prediction and artificial intelligence tools, extreme weather still present challenges. More specifically, identifying the precursors of such extreme weather events and how these precursors may evolve under climate change remain unclear. In this paper, we propose to use post-hoc interpretability methods to construct relevance weather maps that show the key extreme-weather precursors identified by deep learning models. We then compare this machine view with existing domain knowledge to understand whether deep learning models identified patterns in data that may enrich our understanding of extreme-weather precursors. We finally bin these relevant maps into different multi-year time periods to understand the role that climate change is having on these precursors. The experiments are carried out on Indochina heatwaves, but the methodology can be readily extended to other extreme weather events worldwide.
Integrating Neural Operators with Diffusion Models Improves Spectral Representation in Turbulence Modeling
Sep 13, 2024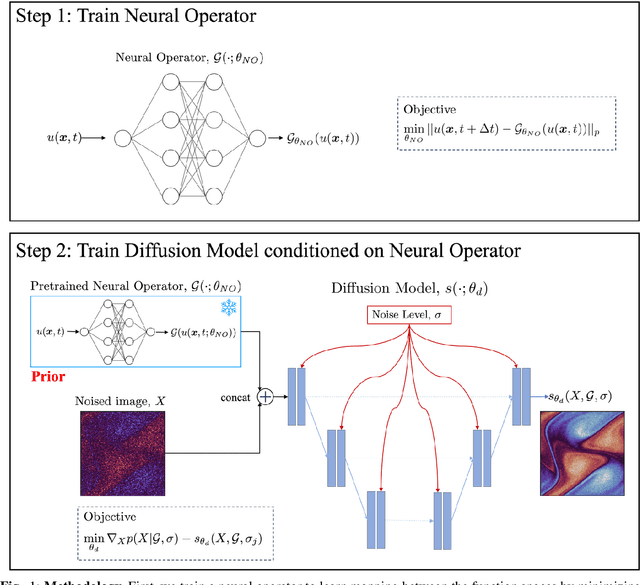
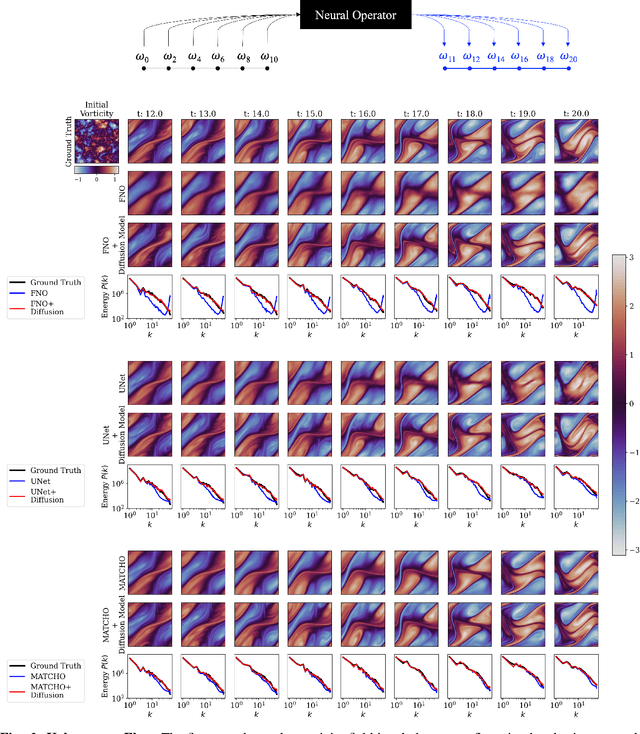
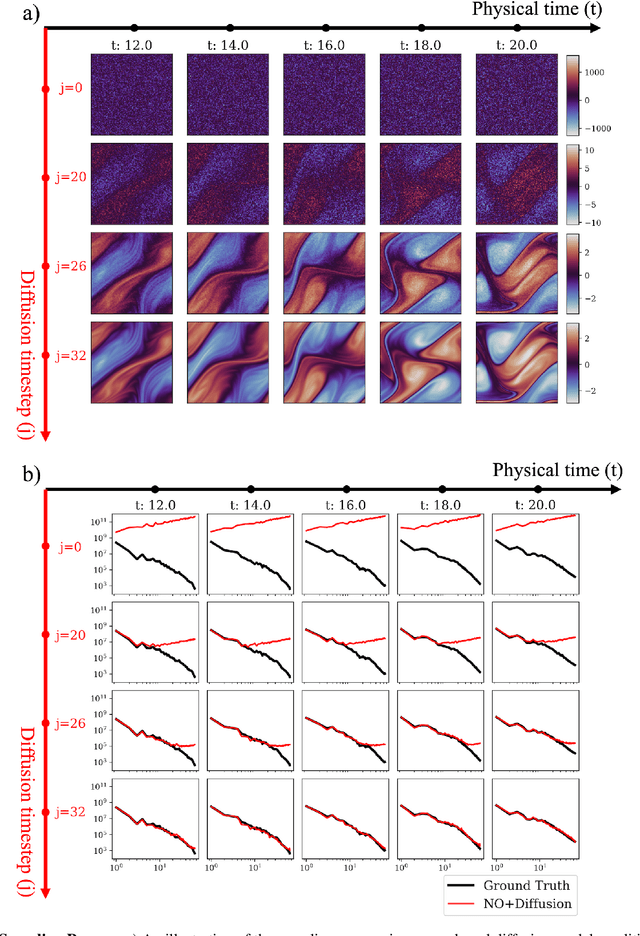

We integrate neural operators with diffusion models to address the spectral limitations of neural operators in surrogate modeling of turbulent flows. While neural operators offer computational efficiency, they exhibit deficiencies in capturing high-frequency flow dynamics, resulting in overly smooth approximations. To overcome this, we condition diffusion models on neural operators to enhance the resolution of turbulent structures. Our approach is validated for different neural operators on diverse datasets, including a high Reynolds number jet flow simulation and experimental Schlieren velocimetry. The proposed method significantly improves the alignment of predicted energy spectra with true distributions compared to neural operators alone. Additionally, proper orthogonal decomposition analysis demonstrates enhanced spectral fidelity in space-time. This work establishes a new paradigm for combining generative models with neural operators to advance surrogate modeling of turbulent systems, and it can be used in other scientific applications that involve microstructure and high-frequency content. See our project page: vivekoommen.github.io/NO_DM
TransformerG2G: Adaptive time-stepping for learning temporal graph embeddings using transformers
Jul 05, 2023



Dynamic graph embedding has emerged as a very effective technique for addressing diverse temporal graph analytic tasks (i.e., link prediction, node classification, recommender systems, anomaly detection, and graph generation) in various applications. Such temporal graphs exhibit heterogeneous transient dynamics, varying time intervals, and highly evolving node features throughout their evolution. Hence, incorporating long-range dependencies from the historical graph context plays a crucial role in accurately learning their temporal dynamics. In this paper, we develop a graph embedding model with uncertainty quantification, TransformerG2G, by exploiting the advanced transformer encoder to first learn intermediate node representations from its current state ($t$) and previous context (over timestamps [$t-1, t-l$], $l$ is the length of context). Moreover, we employ two projection layers to generate lower-dimensional multivariate Gaussian distributions as each node's latent embedding at timestamp $t$. We consider diverse benchmarks with varying levels of ``novelty" as measured by the TEA plots. Our experiments demonstrate that the proposed TransformerG2G model outperforms conventional multi-step methods and our prior work (DynG2G) in terms of both link prediction accuracy and computational efficiency, especially for high degree of novelty. Furthermore, the learned time-dependent attention weights across multiple graph snapshots reveal the development of an automatic adaptive time stepping enabled by the transformer. Importantly, by examining the attention weights, we can uncover temporal dependencies, identify influential elements, and gain insights into the complex interactions within the graph structure. For example, we identified a strong correlation between attention weights and node degree at the various stages of the graph topology evolution.
Learning bias corrections for climate models using deep neural operators
Feb 07, 2023Numerical simulation for climate modeling resolving all important scales is a computationally taxing process. Therefore, to circumvent this issue a low resolution simulation is performed, which is subsequently corrected for bias using reanalyzed data (ERA5), known as nudging correction. The existing implementation for nudging correction uses a relaxation based method for the algebraic difference between low resolution and ERA5 data. In this study, we replace the bias correction process with a surrogate model based on the Deep Operator Network (DeepONet). DeepONet (Deep Operator Neural Network) learns the mapping from the state before nudging (a functional) to the nudging tendency (another functional). The nudging tendency is a very high dimensional data albeit having many low energy modes. Therefore, the DeepoNet is combined with a convolution based auto-encoder-decoder (AED) architecture in order to learn the nudging tendency in a lower dimensional latent space efficiently. The accuracy of the DeepONet model is tested against the nudging tendency obtained from the E3SMv2 (Energy Exascale Earth System Model) and shows good agreement. The overarching goal of this work is to deploy the DeepONet model in an online setting and replace the nudging module in the E3SM loop for better efficiency and accuracy.
Physics-Informed Deep Neural Operator Networks
Jul 17, 2022



Standard neural networks can approximate general nonlinear operators, represented either explicitly by a combination of mathematical operators, e.g., in an advection-diffusion-reaction partial differential equation, or simply as a black box, e.g., a system-of-systems. The first neural operator was the Deep Operator Network (DeepONet), proposed in 2019 based on rigorous approximation theory. Since then, a few other less general operators have been published, e.g., based on graph neural networks or Fourier transforms. For black box systems, training of neural operators is data-driven only but if the governing equations are known they can be incorporated into the loss function during training to develop physics-informed neural operators. Neural operators can be used as surrogates in design problems, uncertainty quantification, autonomous systems, and almost in any application requiring real-time inference. Moreover, independently pre-trained DeepONets can be used as components of a complex multi-physics system by coupling them together with relatively light training. Here, we present a review of DeepONet, the Fourier neural operator, and the graph neural operator, as well as appropriate extensions with feature expansions, and highlight their usefulness in diverse applications in computational mechanics, including porous media, fluid mechanics, and solid mechanics.