 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Contingencies of Physical Embodiment Allow for Open-Endedness and Care
Oct 08, 2025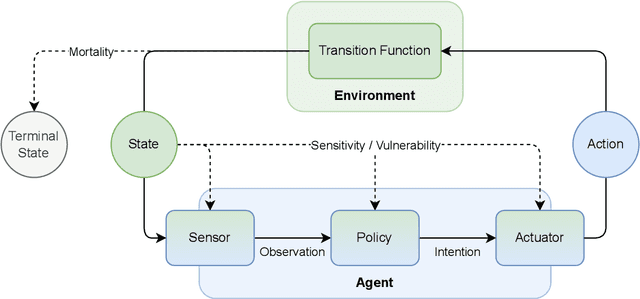
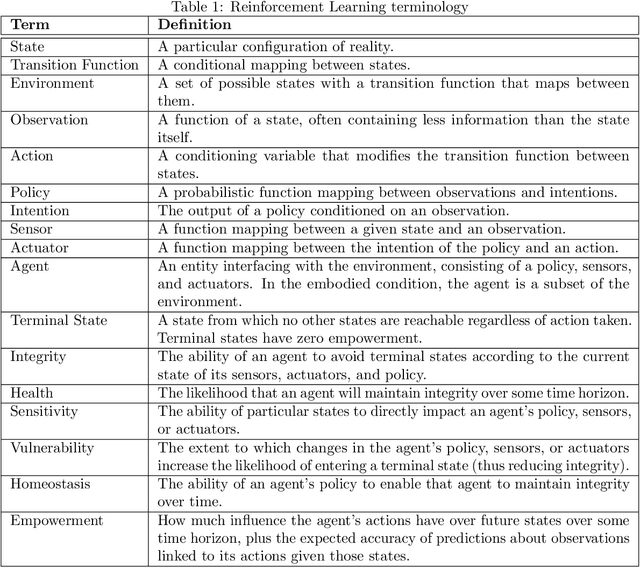
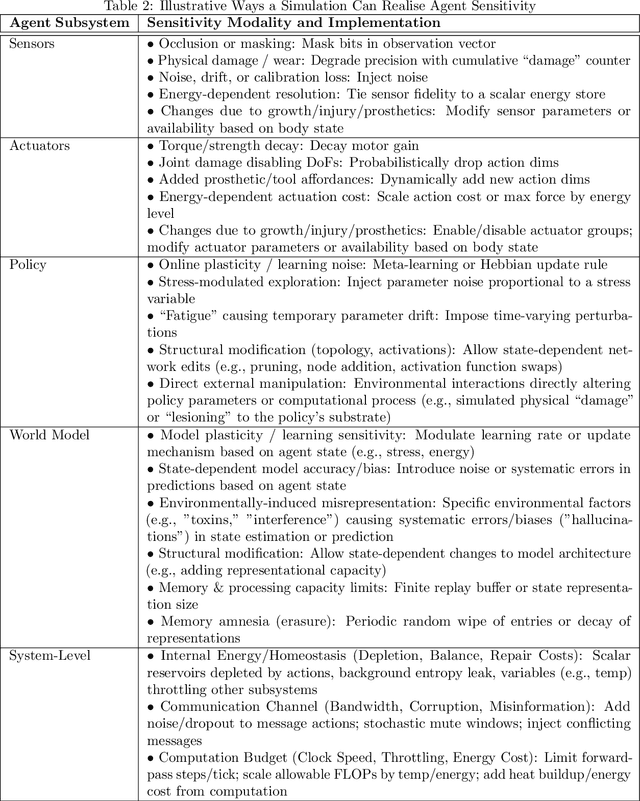
Physical vulnerability and mortality are often seen as obstacles to be avoided in the development of artificial agents, which struggle to adapt to open-ended environments and provide aligned care. Meanwhile, biological organisms survive, thrive, and care for each other in an open-ended physical world with relative ease and efficiency. Understanding the role of the conditions of life in this disparity can aid in developing more robust, adaptive, and caring artificial agents. Here we define two minimal conditions for physical embodiment inspired by the existentialist phenomenology of Martin Heidegger: being-in-the-world (the agent is a part of the environment) and being-towards-death (unless counteracted, the agent drifts toward terminal states due to the second law of thermodynamics). We propose that from these conditions we can obtain both a homeostatic drive - aimed at maintaining integrity and avoiding death by expending energy to learn and act - and an intrinsic drive to continue to do so in as many ways as possible. Drawing inspiration from Friedrich Nietzsche's existentialist concept of will-to-power, we examine how intrinsic drives to maximize control over future states, e.g., empowerment, allow agents to increase the probability that they will be able to meet their future homeostatic needs, thereby enhancing their capacity to maintain physical integrity. We formalize these concepts within a reinforcement learning framework, which enables us to examine how intrinsically driven embodied agents learning in open-ended multi-agent environments may cultivate the capacities for open-endedness and care.ov
A Path Towards Legal Autonomy: An interoperable and explainable approach to extracting, transforming, loading and computing legal information using large language models, expert systems and Bayesian networks
Mar 27, 2024Legal autonomy - the lawful activity of artificial intelligence agents - can be achieved in one of two ways. It can be achieved either by imposing constraints on AI actors such as developers, deployers and users, and on AI resources such as data, or by imposing constraints on the range and scope of the impact that AI agents can have on the environment. The latter approach involves encoding extant rules concerning AI driven devices into the software of AI agents controlling those devices (e.g., encoding rules about limitations on zones of operations into the agent software of an autonomous drone device). This is a challenge since the effectivity of such an approach requires a method of extracting, loading, transforming and computing legal information that would be both explainable and legally interoperable, and that would enable AI agents to reason about the law. In this paper, we sketch a proof of principle for such a method using large language models (LLMs), expert legal systems known as legal decision paths, and Bayesian networks. We then show how the proposed method could be applied to extant regulation in matters of autonomous cars, such as the California Vehicle Code.
Active Inference and Intentional Behaviour
Dec 16, 2023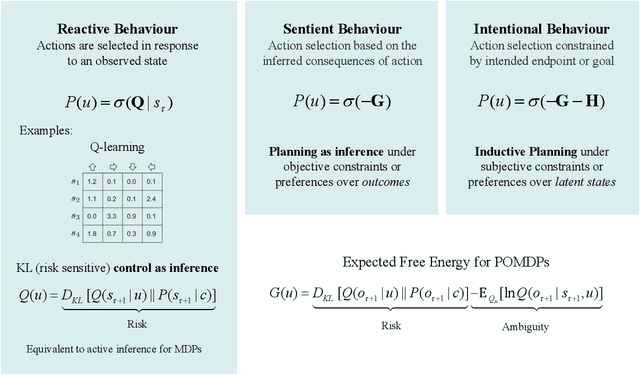
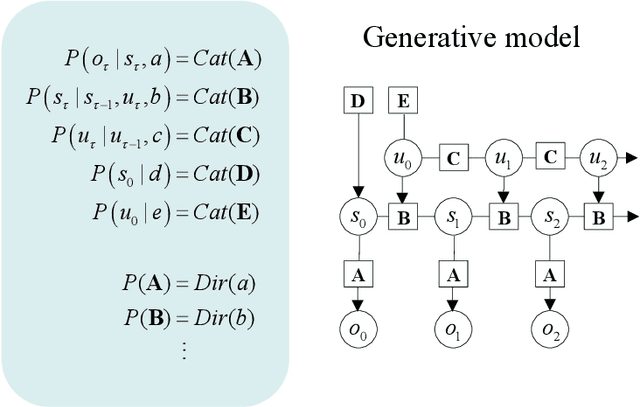

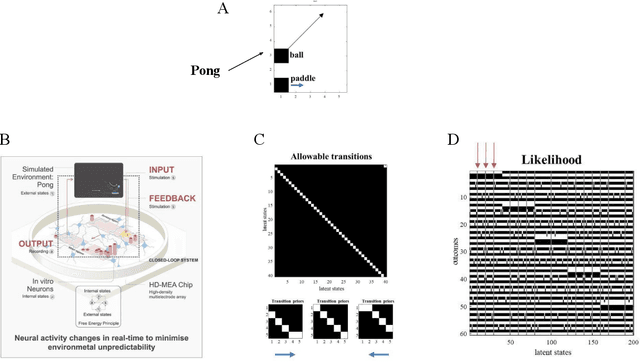
Recent advances in theoretical biology suggest that basal cognition and sentient behaviour are emergent properties of in vitro cell cultures and neuronal networks, respectively. Such neuronal networks spontaneously learn structured behaviours in the absence of reward or reinforcement. In this paper, we characterise this kind of self-organisation through the lens of the free energy principle, i.e., as self-evidencing. We do this by first discussing the definitions of reactive and sentient behaviour in the setting of active inference, which describes the behaviour of agents that model the consequences of their actions. We then introduce a formal account of intentional behaviour, that describes agents as driven by a preferred endpoint or goal in latent state-spaces. We then investigate these forms of (reactive, sentient, and intentional) behaviour using simulations. First, we simulate the aforementioned in vitro experiments, in which neuronal cultures spontaneously learn to play Pong, by implementing nested, free energy minimising processes. The simulations are then used to deconstruct the ensuing predictive behaviour, leading to the distinction between merely reactive, sentient, and intentional behaviour, with the latter formalised in terms of inductive planning. This distinction is further studied using simple machine learning benchmarks (navigation in a grid world and the Tower of Hanoi problem), that show how quickly and efficiently adaptive behaviour emerges under an inductive form of active inference.
Supervised structure learning
Nov 17, 2023



This paper concerns structure learning or discovery of discrete generative models. It focuses on Bayesian model selection and the assimilation of training data or content, with a special emphasis on the order in which data are ingested. A key move - in the ensuing schemes - is to place priors on the selection of models, based upon expected free energy. In this setting, expected free energy reduces to a constrained mutual information, where the constraints inherit from priors over outcomes (i.e., preferred outcomes). The resulting scheme is first used to perform image classification on the MNIST dataset to illustrate the basic idea, and then tested on a more challenging problem of discovering models with dynamics, using a simple sprite-based visual disentanglement paradigm and the Tower of Hanoi (cf., blocks world) problem. In these examples, generative models are constructed autodidactically to recover (i.e., disentangle) the factorial structure of latent states - and their characteristic paths or dynamics.