 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Path Towards Legal Autonomy: An interoperable and explainable approach to extracting, transforming, loading and computing legal information using large language models, expert systems and Bayesian networks
Mar 27, 2024Legal autonomy - the lawful activity of artificial intelligence agents - can be achieved in one of two ways. It can be achieved either by imposing constraints on AI actors such as developers, deployers and users, and on AI resources such as data, or by imposing constraints on the range and scope of the impact that AI agents can have on the environment. The latter approach involves encoding extant rules concerning AI driven devices into the software of AI agents controlling those devices (e.g., encoding rules about limitations on zones of operations into the agent software of an autonomous drone device). This is a challenge since the effectivity of such an approach requires a method of extracting, loading, transforming and computing legal information that would be both explainable and legally interoperable, and that would enable AI agents to reason about the law. In this paper, we sketch a proof of principle for such a method using large language models (LLMs), expert legal systems known as legal decision paths, and Bayesian networks. We then show how the proposed method could be applied to extant regulation in matters of autonomous cars, such as the California Vehicle Code.
Designing Ecosystems of Intelligence from First Principles
Dec 02, 2022


This white paper lays out a vision of research and development in the field of artificial intelligence for the next decade (and beyond). Its denouement is a cyber-physical ecosystem of natural and synthetic sense-making, in which humans are integral participants$\unicode{x2014}$what we call ''shared intelligence''. This vision is premised on active inference, a formulation of adaptive behavior that can be read as a physics of intelligence, and which inherits from the physics of self-organization. In this context, we understand intelligence as the capacity to accumulate evidence for a generative model of one's sensed world$\unicode{x2014}$also known as self-evidencing. Formally, this corresponds to maximizing (Bayesian) model evidence, via belief updating over several scales: i.e., inference, learning, and model selection. Operationally, this self-evidencing can be realized via (variational) message passing or belief propagation on a factor graph. Crucially, active inference foregrounds an existential imperative of intelligent systems; namely, curiosity or the resolution of uncertainty. This same imperative underwrites belief sharing in ensembles of agents, in which certain aspects (i.e., factors) of each agent's generative world model provide a common ground or frame of reference. Active inference plays a foundational role in this ecology of belief sharing$\unicode{x2014}$leading to a formal account of collective intelligence that rests on shared narratives and goals. We also consider the kinds of communication protocols that must be developed to enable such an ecosystem of intelligences and motivate the development of a shared hyper-spatial modeling language and transaction protocol, as a first$\unicode{x2014}$and key$\unicode{x2014}$step towards such an ecology.
Trial by Flyer: Building Quadcopters From Scratch in a Ten-Week Capstone Course
Feb 27, 2019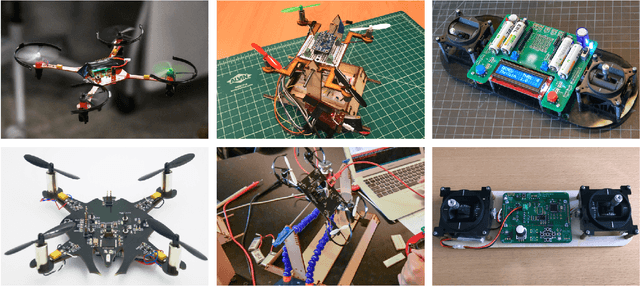
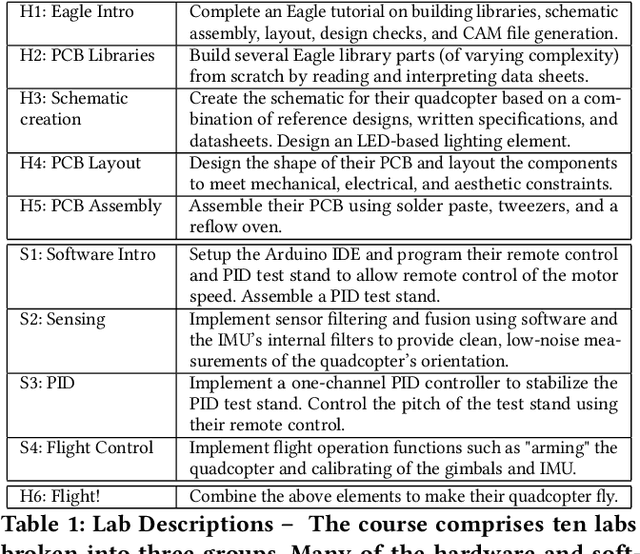

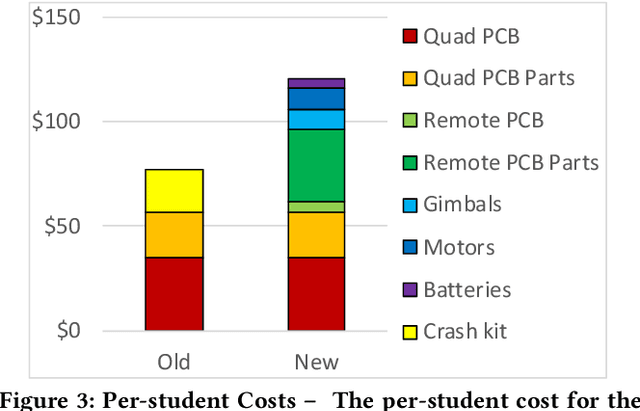
We describe our experience teaching an intensive capstone course in which pairs of students build the hardware and software for a remote-controller quad-rotor aircraft (i.e., a quadcopter or "drone") from scratch in one 10-week quarter. The course covers printed circuit board (PCB) design and assembly, basic control theory and sensor fusion, and embedded systems programming. To reduce the workload on course staff and provide higher-quality feedback on student designs, we have implemented an automated PCB design checking tool/autograder. We describe the course content in detail, identify the challenges it presents to students and course staff, and propose changes to further increase student success and improve the scalability of the course.