 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRecognition of Handwritten Japanese Characters Using Ensemble of Convolutional Neural Networks
Jun 06, 2023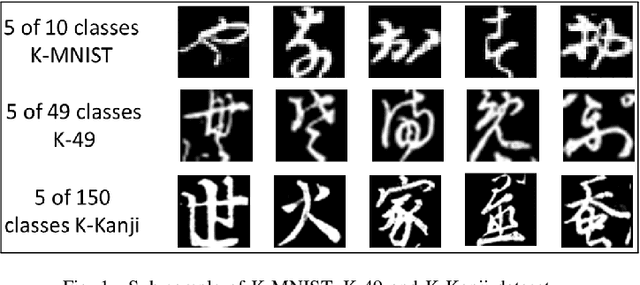
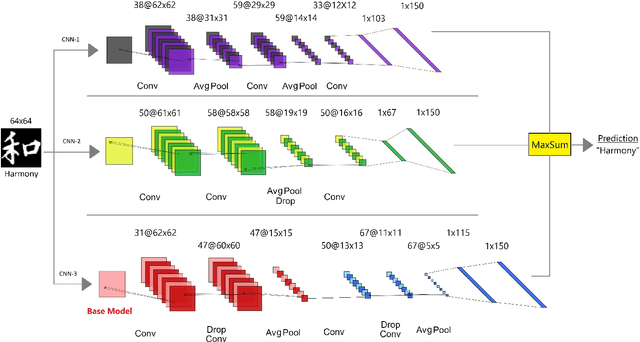
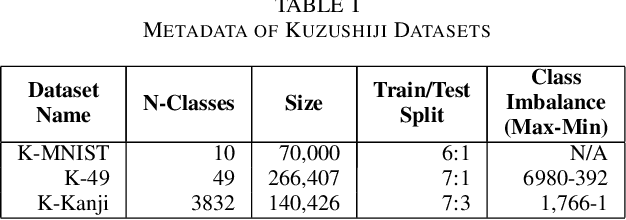
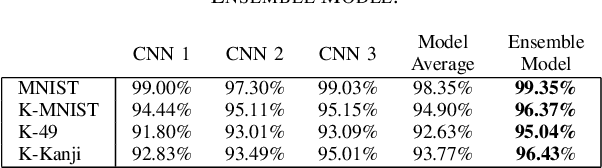
The Japanese writing system is complex, with three character types of Hiragana, Katakana, and Kanji. Kanji consists of thousands of unique characters, further adding to the complexity of character identification and literature understanding. Being able to translate handwritten Japanese characters into digital text is useful for data analysis, translation, learning and cultural preservation. In this study, a machine learning approach to analyzing and recognizing handwritten Japanese characters (Kanji) is proposed. The study used an ensemble of three convolutional neural networks (CNNs) for recognizing handwritten Kanji characters and utilized four datasets of MNIST, K-MNIST, Kuzushiji-49 (K49) and the top 150 represented classes in the Kuzushiji-Kanji (K-Kanji) dataset for its performance evaluation. The results indicate feasibility of using proposed CNN-ensemble architecture for recognizing handwritten characters, achieving 99.4%, 96.4%, 95.0% and 96.4% classification accuracy on MNIST, K-MNIS, K49, and K-Kanji datasets respectively.
Triplet Loss-less Center Loss Sampling Strategies in Facial Expression Recognition Scenarios
Feb 08, 2023
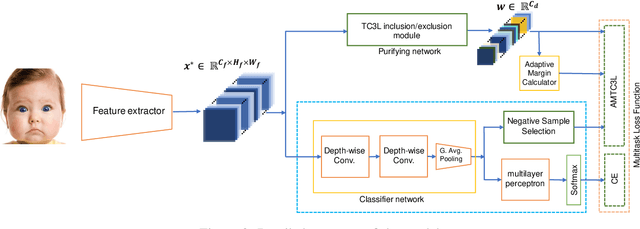
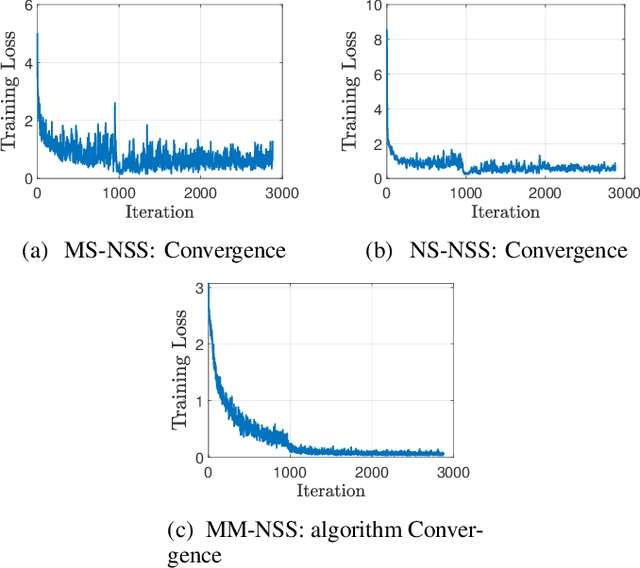
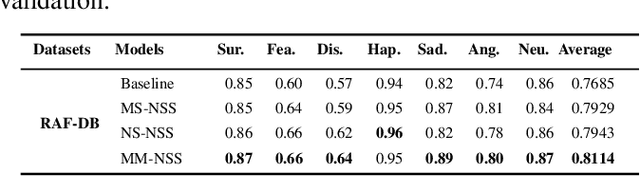
Facial expressions convey massive information and play a crucial role in emotional expression. Deep neural network (DNN) accompanied by deep metric learning (DML) techniques boost the discriminative ability of the model in facial expression recognition (FER) applications. DNN, equipped with only classification loss functions such as Cross-Entropy cannot compact intra-class feature variation or separate inter-class feature distance as well as when it gets fortified by a DML supporting loss item. The triplet center loss (TCL) function is applied on all dimensions of the sample's embedding in the embedding space. In our work, we developed three strategies: fully-synthesized, semi-synthesized, and prediction-based negative sample selection strategies. To achieve better results, we introduce a selective attention module that provides a combination of pixel-wise and element-wise attention coefficients using high-semantic deep features of input samples. We evaluated the proposed method on the RAF-DB, a highly imbalanced dataset. The experimental results reveal significant improvements in comparison to the baseline for all three negative sample selection strategies.
Learning Oculomotor Behaviors from Scanpath
Aug 11, 2021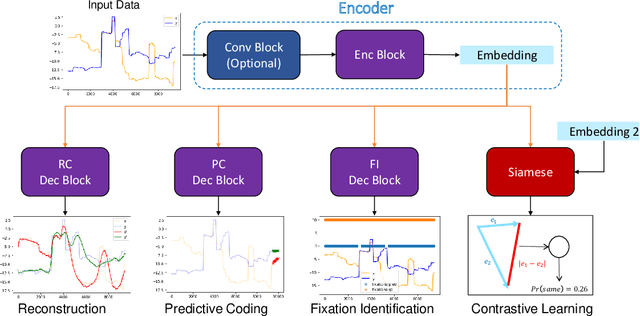
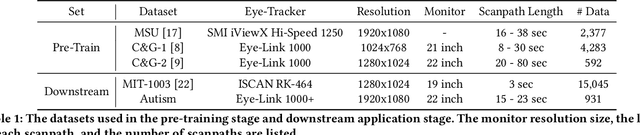
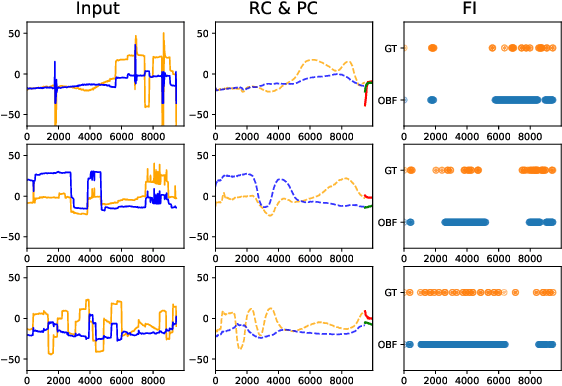
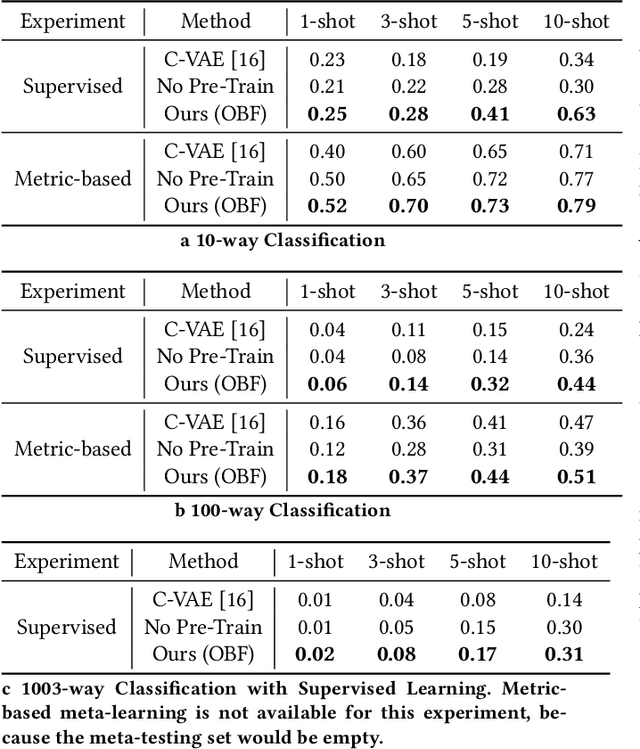
Identifying oculomotor behaviors relevant for eye-tracking applications is a critical but often challenging task. Aiming to automatically learn and extract knowledge from existing eye-tracking data, we develop a novel method that creates rich representations of oculomotor scanpaths to facilitate the learning of downstream tasks. The proposed stimulus-agnostic Oculomotor Behavior Framework (OBF) model learns human oculomotor behaviors from unsupervised and semi-supervised tasks, including reconstruction, predictive coding, fixation identification, and contrastive learning tasks. The resultant pre-trained OBF model can be used in a variety of applications. Our pre-trained model outperforms baseline approaches and traditional scanpath methods in autism spectrum disorder and viewed-stimulus classification tasks. Ablation experiments further show our proposed method could achieve even better results with larger model sizes and more diverse eye-tracking training datasets, supporting the model's potential for future eye-tracking applications. Open source code: http://github.com/BeibinLi/OBF.
Current Advancements on Autonomous Mission Planning and Management Systems: an AUV and UAV perspective
Jul 10, 2020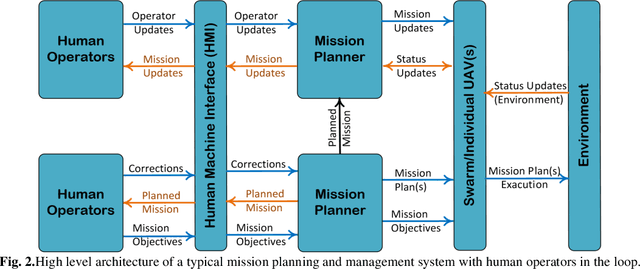
Advances in hardware technology have enabled more integration of sophisticated software, triggering progress in the development and employment of Unmanned Vehicles (UVs), and mitigating restraints for onboard intelligence. As a result, UVs can now take part in more complex mission where continuous transformation in environmental condition calls for a higher level of situational responsiveness. This paper serves as an introduction to UVs mission planning and management systems aiming to highlight some of the recent developments in the field of autonomous underwater and aerial vehicles in addition to stressing some possible future directions and discussing the learned lessons. A comprehensive survey over autonomy assessment of UVs, and different aspects of autonomy such as situation awareness, cognition, and decision-making has been provided in this study. The paper separately explains the humanoid and autonomous system's performance and highlights the role and impact of a human in UVs operations.
A Hierarchal Planning Framework for AUV Mission Management in a Spatio-Temporal Varying Ocean
Nov 20, 2017The purpose of this paper is to provide a hierarchical dynamic mission planning framework for a single autonomous underwater vehicle (AUV) to accomplish task-assign process in a limited time interval while operating in an uncertain undersea environment, where spatio-temporal variability of the operating field is taken into account. To this end, a high level reactive mission planner and a low level motion planning system are constructed. The high level system is responsible for task priority assignment and guiding the vehicle toward a target of interest considering on-time termination of the mission. The lower layer is in charge of generating optimal trajectories based on sequence of tasks and dynamicity of operating terrain. The mission planner is able to reactively re-arrange the tasks based on mission/terrain updates while the low level planner is capable of coping unexpected changes of the terrain by correcting the old path and re-generating a new trajectory. As a result, the vehicle is able to undertake the maximum number of tasks with certain degree of maneuverability having situational awareness of the operating field. The computational engine of the mentioned framework is based on the biogeography based optimization (BBO) algorithm that is capable of providing efficient solutions. To evaluate the performance of the proposed framework, firstly, a realistic model of undersea environment is provided based on realistic map data, and then several scenarios, treated as real experiments, are designed through the simulation study. Additionally, to show the robustness and reliability of the framework, Monte-Carlo simulation is carried out and statistical analysis is performed. The results of simulations indicate the significant potential of the two-level hierarchical mission planning system in mission success and its applicability for real-time implementation.
An Efficient Hybrid Route-Path Planning Model For Dynamic Task Allocation and Safe Maneuvering of an Underwater Vehicle in a Realistic Environment
Nov 20, 2017This paper presents a hybrid route-path planning model for an Autonomous Underwater Vehicle's task assignment and management while the AUV is operating through the variable littoral waters. Several prioritized tasks distributed in a large scale terrain is defined first; then, considering the limitations over the mission time, vehicle's battery, uncertainty and variability of the underlying operating field, appropriate mission timing and energy management is undertaken. The proposed objective is fulfilled by incorporating a route-planner that is in charge of prioritizing the list of available tasks according to available battery and a path-planer that acts in a smaller scale to provide vehicle's safe deployment against environmental sudden changes. The synchronous process of the task assign-route and path planning is simulated using a specific composition of Differential Evolution and Firefly Optimization (DEFO) Algorithms. The simulation results indicate that the proposed hybrid model offers efficient performance in terms of completion of maximum number of assigned tasks while perfectly expending the minimum energy, provided by using the favorable current flow, and controlling the associated mission time. The Monte-Carlo test is also performed for further analysis. The corresponding results show the significant robustness of the model against uncertainties of the operating field and variations of mission conditions.
Persistent AUV Operations Using a Robust Reactive Mission and Path Planning (RRMPP) Architecture
Mar 28, 2017
Providing a higher level of decision autonomy and accompanying prompt changes of an uncertain environment is a true challenge of AUVs autonomous operations. The proceeding approach introduces a robust reactive structure that accommodates an AUV's mission planning, task-time management in a top level and incorporates environmental changes by a synchronic motion planning in a lower level. The proposed architecture is developed in a hierarchal modular format and a bunch of evolutionary algorithms are employed by each module to investigate the efficiency and robustness of the structure in different mission scenarios while water current data, uncertain static-mobile/motile obstacles, and vehicles Kino-dynamic constraints are taken into account. The motion planner is facilitated with online re-planning capability to refine the vehicle's trajectory based on local variations of the environment. A small computational load is devoted for re-planning procedure since the upper layer mission planner renders an efficient overview of the operation area that AUV should fly thru. Numerical simulations are carried out to investigate robustness and performance of the architecture in different situations of a real-world underwater environment. Analysis of the simulation results claims the remarkable capability of the proposed model in accurate mission task-time-threat management while guarantying a secure deployment during the mission.
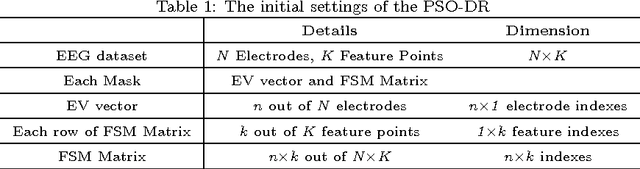
Reducing training requirements through evolutionary based dimension reduction and subject transfer
Feb 06, 2016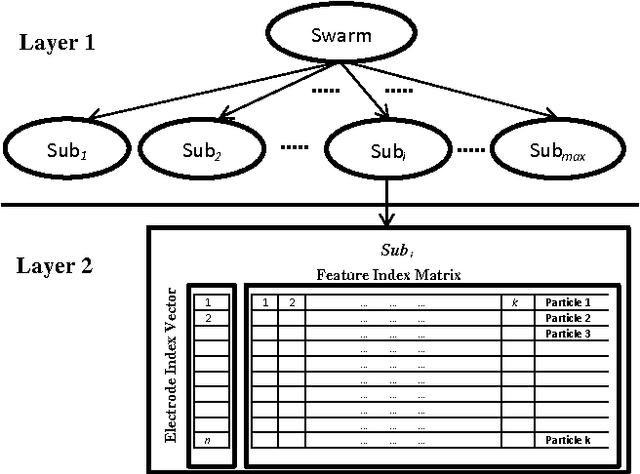

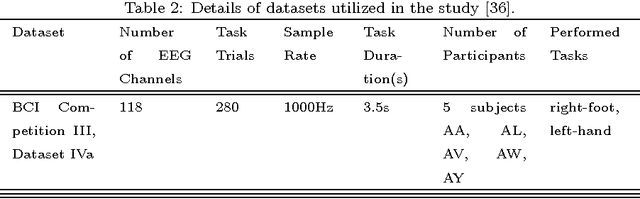
Training Brain Computer Interface (BCI) systems to understand the intention of a subject through Electroencephalogram (EEG) data currently requires multiple training sessions with a subject in order to develop the necessary expertise to distinguish signals for different tasks. Conventionally the task of training the subject is done by introducing a training and calibration stage during which some feedback is presented to the subject. This training session can take several hours which is not appropriate for on-line EEG-based BCI systems. An alternative approach is to use previous recording sessions of the same person or some other subjects that performed the same tasks (subject transfer) for training the classifiers. The main aim of this study is to generate a methodology that allows the use of data from other subjects while reducing the dimensions of the data. The study investigates several possibilities for reducing the necessary training and calibration period in subjects and the classifiers and addresses the impact of i) evolutionary subject transfer and ii) adapting previously trained methods (retraining) using other subjects data. Our results suggest reduction to 40% of target subject data is sufficient for training the classifier. Our results also indicate the superiority of the approaches that incorporated evolutionary subject transfer and highlights the feasibility of adapting a system trained on other subjects.