 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Hierarchal Planning Framework for AUV Mission Management in a Spatio-Temporal Varying Ocean
Nov 20, 2017The purpose of this paper is to provide a hierarchical dynamic mission planning framework for a single autonomous underwater vehicle (AUV) to accomplish task-assign process in a limited time interval while operating in an uncertain undersea environment, where spatio-temporal variability of the operating field is taken into account. To this end, a high level reactive mission planner and a low level motion planning system are constructed. The high level system is responsible for task priority assignment and guiding the vehicle toward a target of interest considering on-time termination of the mission. The lower layer is in charge of generating optimal trajectories based on sequence of tasks and dynamicity of operating terrain. The mission planner is able to reactively re-arrange the tasks based on mission/terrain updates while the low level planner is capable of coping unexpected changes of the terrain by correcting the old path and re-generating a new trajectory. As a result, the vehicle is able to undertake the maximum number of tasks with certain degree of maneuverability having situational awareness of the operating field. The computational engine of the mentioned framework is based on the biogeography based optimization (BBO) algorithm that is capable of providing efficient solutions. To evaluate the performance of the proposed framework, firstly, a realistic model of undersea environment is provided based on realistic map data, and then several scenarios, treated as real experiments, are designed through the simulation study. Additionally, to show the robustness and reliability of the framework, Monte-Carlo simulation is carried out and statistical analysis is performed. The results of simulations indicate the significant potential of the two-level hierarchical mission planning system in mission success and its applicability for real-time implementation.
An Efficient Hybrid Route-Path Planning Model For Dynamic Task Allocation and Safe Maneuvering of an Underwater Vehicle in a Realistic Environment
Nov 20, 2017This paper presents a hybrid route-path planning model for an Autonomous Underwater Vehicle's task assignment and management while the AUV is operating through the variable littoral waters. Several prioritized tasks distributed in a large scale terrain is defined first; then, considering the limitations over the mission time, vehicle's battery, uncertainty and variability of the underlying operating field, appropriate mission timing and energy management is undertaken. The proposed objective is fulfilled by incorporating a route-planner that is in charge of prioritizing the list of available tasks according to available battery and a path-planer that acts in a smaller scale to provide vehicle's safe deployment against environmental sudden changes. The synchronous process of the task assign-route and path planning is simulated using a specific composition of Differential Evolution and Firefly Optimization (DEFO) Algorithms. The simulation results indicate that the proposed hybrid model offers efficient performance in terms of completion of maximum number of assigned tasks while perfectly expending the minimum energy, provided by using the favorable current flow, and controlling the associated mission time. The Monte-Carlo test is also performed for further analysis. The corresponding results show the significant robustness of the model against uncertainties of the operating field and variations of mission conditions.
Persistent AUV Operations Using a Robust Reactive Mission and Path Planning (RRMPP) Architecture
Mar 28, 2017
Providing a higher level of decision autonomy and accompanying prompt changes of an uncertain environment is a true challenge of AUVs autonomous operations. The proceeding approach introduces a robust reactive structure that accommodates an AUV's mission planning, task-time management in a top level and incorporates environmental changes by a synchronic motion planning in a lower level. The proposed architecture is developed in a hierarchal modular format and a bunch of evolutionary algorithms are employed by each module to investigate the efficiency and robustness of the structure in different mission scenarios while water current data, uncertain static-mobile/motile obstacles, and vehicles Kino-dynamic constraints are taken into account. The motion planner is facilitated with online re-planning capability to refine the vehicle's trajectory based on local variations of the environment. A small computational load is devoted for re-planning procedure since the upper layer mission planner renders an efficient overview of the operation area that AUV should fly thru. Numerical simulations are carried out to investigate robustness and performance of the architecture in different situations of a real-world underwater environment. Analysis of the simulation results claims the remarkable capability of the proposed model in accurate mission task-time-threat management while guarantying a secure deployment during the mission.
An Autonomous Reactive Architecture for Efficient AUV Mission Time Management in Realistic Severe Ocean Environment
Jun 15, 2016Today AUVs operation still remains restricted to very particular tasks with low real autonomy due to battery restrictions. Efficient motion planning and mission scheduling are principle requirement toward advance autonomy and facilitate the vehicle to handle long-range operations. A single vehicle cannot carry out all tasks in a large scale terrain; hence, it needs a certain degree of autonomy in performing robust decision making and awareness of the mission/environment to trade-off between tasks to be completed, managing the available time, and ensuring safe deployment at all stages of the mission. In this respect, this research introduces a modular control architecture including higher/lower level planners, in which the higher level module is responsible for increasing mission productivity by assigning prioritized tasks while guiding the vehicle toward its final destination in a terrain covered by several waypoints; and the lower level is responsible for vehicle's safe deployment in a smaller scale encountering time-varying ocean current and different uncertain static/moving obstacles similar to actual ocean environment. Synchronization between higher and lower level modules is efficiently configured to manage the mission time and to guarantee on-time termination of the mission. The performance and accuracy of two higher and lower level modules are tested and validated using ant colony and firefly optimization algorithm, respectively. After all, the overall performance of the architecture is investigated in 10 different mission scenarios. The analyze of the captured results from different simulated missions confirm the efficiency and inherent robustness of the introduced architecture in efficient time management, safe deployment, and providing beneficial operation by proper prioritizing the tasks in accordance with mission time.
AUV Rendezvous Online Path Planning in a Highly Cluttered Undersea Environment Using Evolutionary Algorithms
Jun 15, 2016In this study, a single autonomous underwater vehicle (AUV) aims to rendezvous with a submerged leader recovery vehicle through a cluttered and variable operating field. The rendezvous problem is transformed into a nonlinear optimal control problem (NOCP) and then numerical solutions are provided. A penalty function method is utilized to combine the boundary conditions, vehicular and environmental constraints with the performance index that is final rendezvous time.Four evolutionary based path planning methods namely particle swarm optimization (PSO), biogeography-based optimization (BBO), differential evolution (DE) and Firefly algorithm (FA) are employed to establish a reactive planner module and provide a numerical solution for the proposed NOCP. The objective is to synthesize and analysis the performance and capability of the mentioned methods for guiding an AUV from loitering point toward the rendezvous place through a comprehensive simulation study.The proposed planner module entails a heuristic for refining the path considering situational awareness of underlying environment, encompassing static and dynamic obstacles overwhelmed in spatiotemporal current vectors.This leads to accommodate the unforeseen changes in the operating field like emergence of unpredicted obstacles or variability of current vector filed and turbulent regions. The simulation results demonstrate the inherent robustness and significant efficiency of the proposed planner in enhancement of the vehicle's autonomy in terms of using current force, coping undesired current disturbance for the desired rendezvous purpose. Advantages and shortcoming of all utilized methods are also presented based on the obtained results.
A Novel Versatile Architecture for Autonomous Underwater Vehicle's Motion Planning and Task Assignment
Jun 15, 2016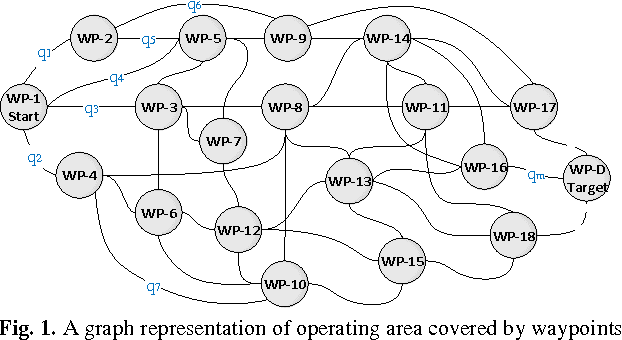
Expansion of today's underwater scenarios and missions necessitates the requestion for robust decision making of the Autonomous Underwater Vehicle (AUV); hence, design an efficient decision making framework is essential for maximizing the mission productivity in a restricted time. This paper focuses on developing a deliberative conflict-free-task assignment architecture encompassing a Global Route Planner (GRP) and a Local Path Planner (LPP) to provide consistent motion planning encountering both environmental dynamic changes and a priori knowledge of the terrain, so that the AUV is reactively guided to the target of interest in the context of an unknown underwater environment. The architecture involves three main modules: The GRP module at the top level deals with the task priority assignment, mission time management, and determination of a feasible route between start and destination point in a large scale environment. The LPP module at the lower level deals with safety considerations and generates collision-free optimal trajectory between each specific pair of waypoints listed in obtained global route. Re-planning module tends to promote robustness and reactive ability of the AUV with respect to the environmental changes. The experimental results for different simulated missions, demonstrate the inherent robustness and drastic efficiency of the proposed scheme in enhancement of the vehicles autonomy in terms of mission productivity, mission time management, and vehicle safety.