 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Cooperative Dynamic Task Assignment Framework for COTSBot AUVs
Jan 11, 2021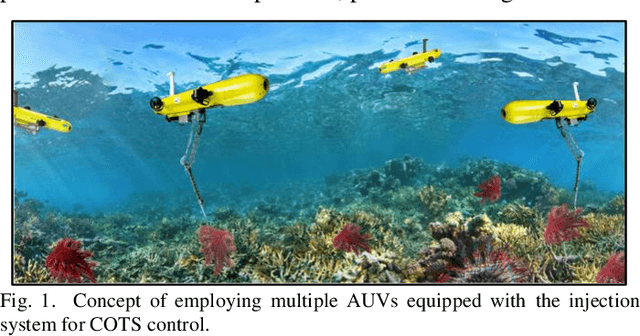
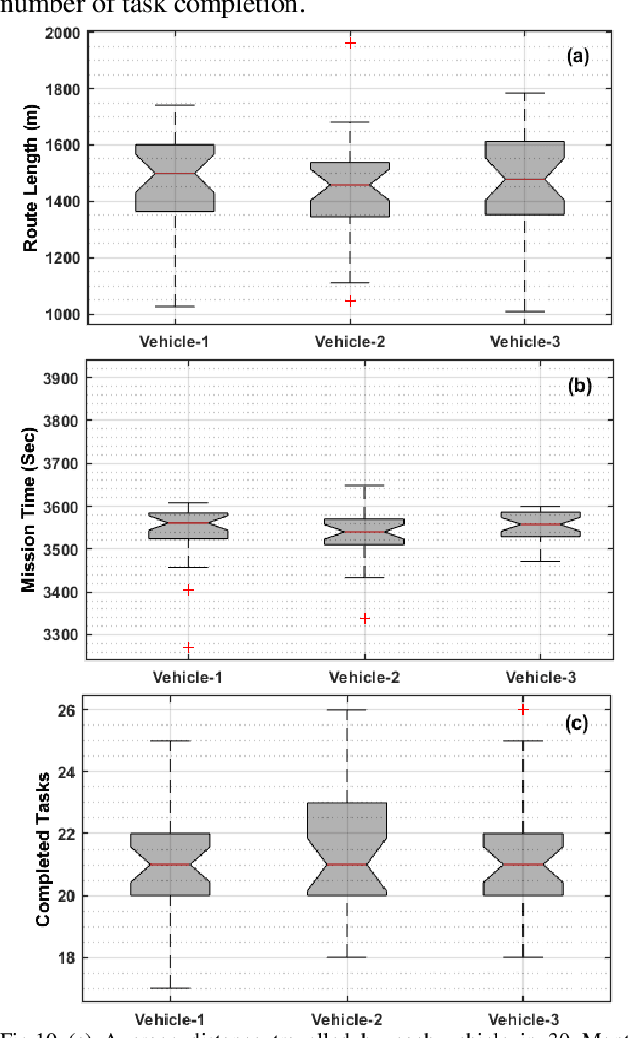
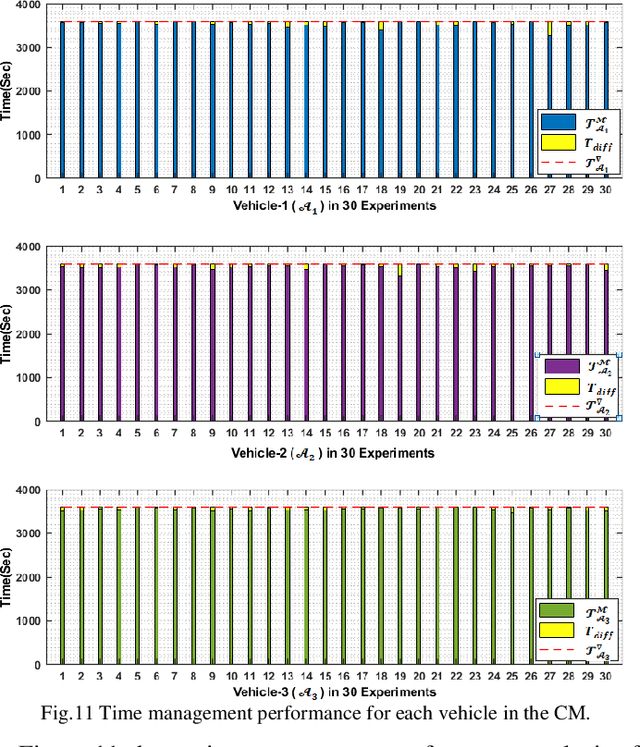
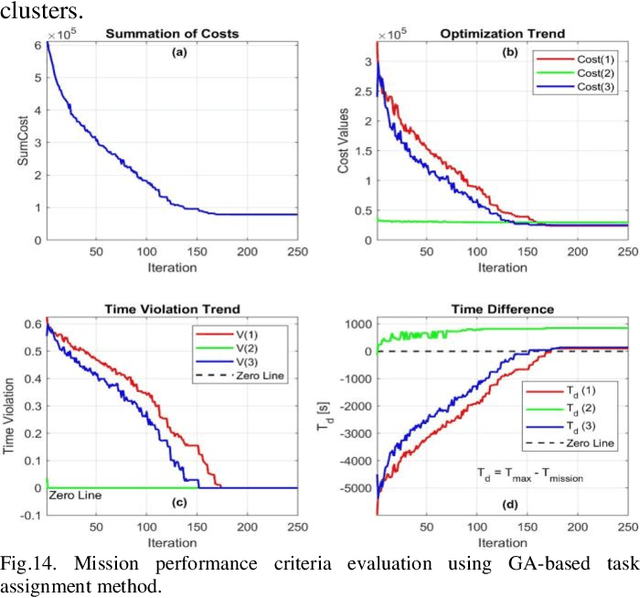
This paper presents a cooperative dynamic task assignment framework for a certain class of Autonomous Underwater Vehicles (AUVs) employed to control outbreak of Crown-Of-Thorns Starfish (COTS) in Australia's Great Barrier Reef. The problem of monitoring and controlling the COTS is transcribed into a constrained task assignment problem in which eradicating clusters of COTS, by the injection system of COTSbot AUVs, is considered as a task. A probabilistic map of the operating environment including seabed terrain, clusters of COTS, and coastlines is constructed. Then, a novel heuristic algorithm called Heuristic Fleet Cooperation (HFC) is developed to provide a cooperative injection of the COTSbot AUVs to the maximum possible COTS in an assigned mission time. Extensive simulation studies together with quantitative performance analysis are conducted to demonstrate the effectiveness and robustness of the proposed cooperative task assignment algorithm in eradicating the COTS in the Great Barrier Reef.
Feasibility Assessment of a Cost-Effective Two-Wheel Kian-I Mobile Robot for Autonomous Navigation
Dec 10, 2020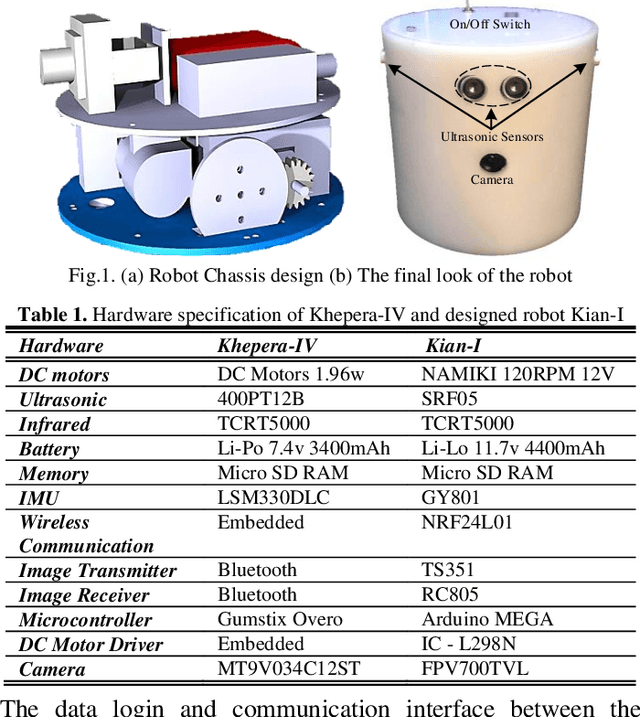
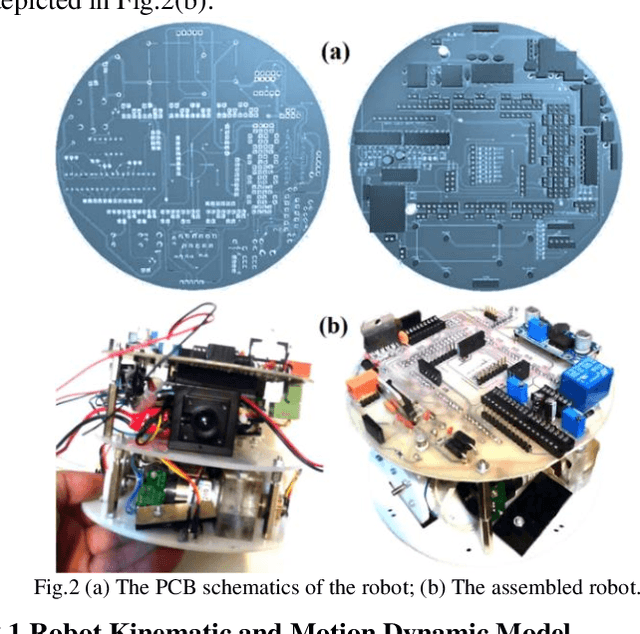
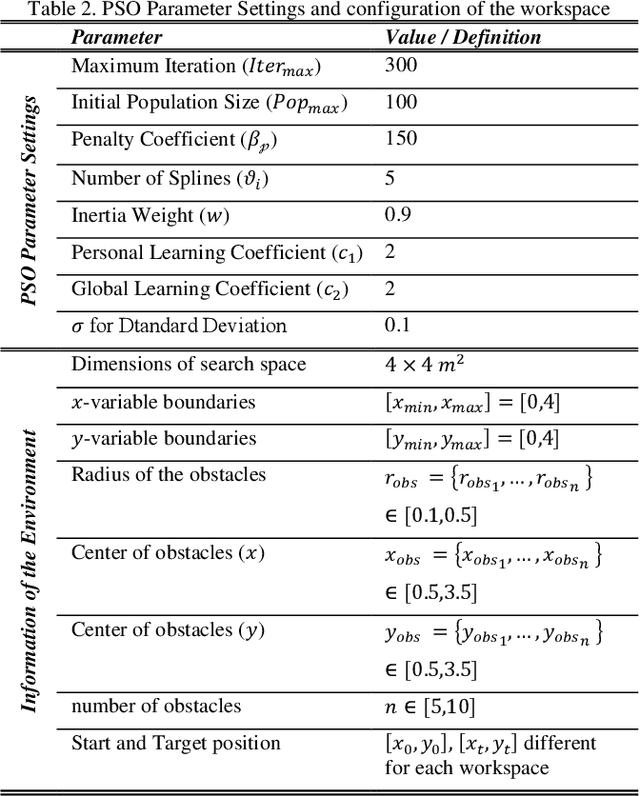
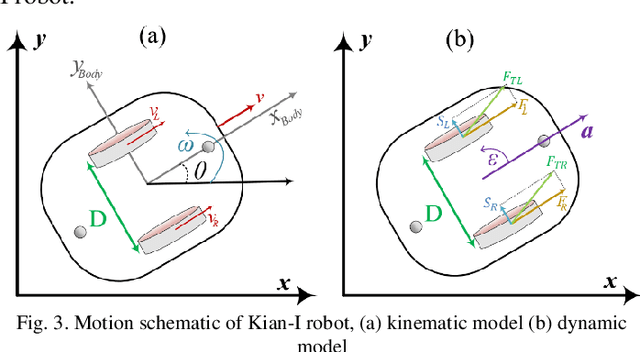
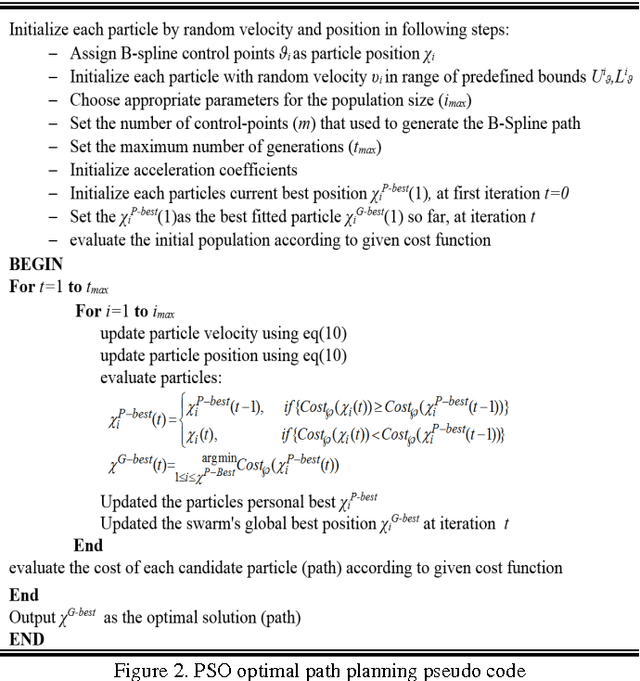
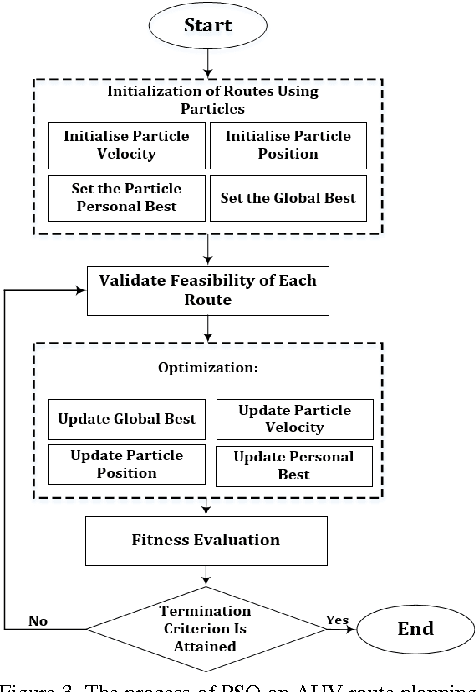
A two-wheeled mobile robot, namely Kian-I, is designed and prototyped in this research. The Kian-I is comparable with Khepera-IV in terms of dimensional specifications, mounted sensors, and performance capabilities and can be used for educational purposes and cost-effective experimental tests. A motion control architecture is designed for Kian-I in this study to facilitate accurate navigation for the robot in an immersive environment. The implemented control structure consists of two main components of the path recommender system and trajectory tracking controller. Given partial knowledge about the operation field, the path recommender system adopts B-spline curves and Particle Swarm Optimization (PSO) algorithm to determine a collision-free path curve with translational velocity constraint. The provided optimal reference path feeds into the trajectory tracking controller enabling Kian-I to navigate autonomously in the operating field. The trajectory tracking module eliminate the error between the desired path and the followed trajectory through controlling the wheels' velocity. To assess the feasibility of the proposed control architecture, the performance of Kian-I robot in autonomous navigation from any arbitrary initial pose to a target of interest is evaluated through numerous simulation and experimental studies. The experimental results demonstrate the functional capacities and performance of the prototyped robot to be used as a benchmark for investigation and verification of various mobile robot algorithms in the laboratory environment.
Persistent AUV Operations Using a Robust Reactive Mission and Path Planning (RRMPP) Architecture
Mar 28, 2017
Providing a higher level of decision autonomy and accompanying prompt changes of an uncertain environment is a true challenge of AUVs autonomous operations. The proceeding approach introduces a robust reactive structure that accommodates an AUV's mission planning, task-time management in a top level and incorporates environmental changes by a synchronic motion planning in a lower level. The proposed architecture is developed in a hierarchal modular format and a bunch of evolutionary algorithms are employed by each module to investigate the efficiency and robustness of the structure in different mission scenarios while water current data, uncertain static-mobile/motile obstacles, and vehicles Kino-dynamic constraints are taken into account. The motion planner is facilitated with online re-planning capability to refine the vehicle's trajectory based on local variations of the environment. A small computational load is devoted for re-planning procedure since the upper layer mission planner renders an efficient overview of the operation area that AUV should fly thru. Numerical simulations are carried out to investigate robustness and performance of the architecture in different situations of a real-world underwater environment. Analysis of the simulation results claims the remarkable capability of the proposed model in accurate mission task-time-threat management while guarantying a secure deployment during the mission.
Toward Efficient Task Assignment and Motion Planning for Large Scale Underwater Mission
Jun 15, 2016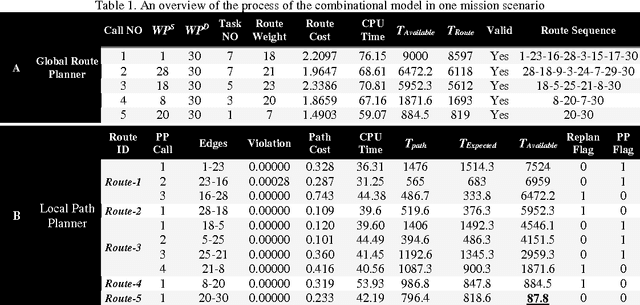
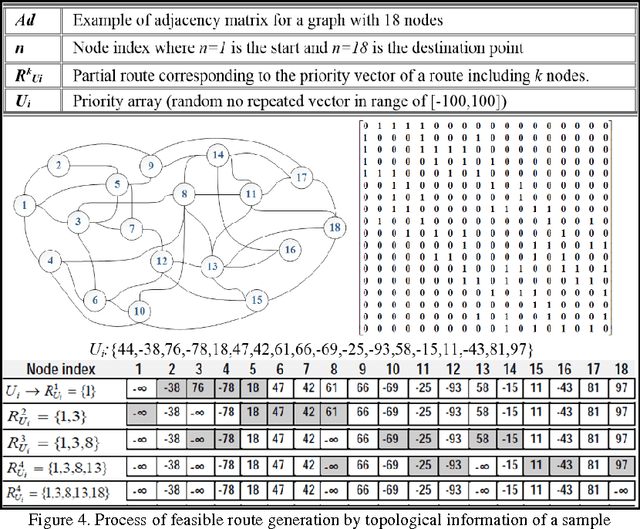
An Autonomous Underwater Vehicle (AUV) needs to acquire a certain degree of autonomy for any particular underwater mission to fulfill the mission objectives successfully and ensure its safety in all stages of the mission in a large scale operating filed. In this paper, a novel combinatorial conflict-free-task assignment strategy consisting an interactive engagement of a local path planner and an adaptive global route planner, is introduced. The method is established upon the heuristic search potency of the Particle Swarm Optimisation (PSO) algorithm to address the discrete nature of routing-task assignment approach and the complexity of NP-hard path planning problem. The proposed hybrid method is highly efficient for having a reactive guidance framework that guarantees successful completion of missions specifically in cluttered environments. To examine the performance of the method in a context of mission productivity, mission time management and vehicle safety, a series of simulation studies are undertaken. The results of simulations declare that the proposed method is reliable and robust, particularly in dealing with uncertainties, and it can significantly enhance the level of vehicle's autonomy by relying on its reactive nature and capability of providing fast feasible solutions.
Biogeography-Based Combinatorial Strategy for Efficient AUV Motion Planning and Task-Time Management
Apr 26, 2016
Autonomous Underwater Vehicles (AUVs) are capable of spending long periods of time for carrying out various underwater missions and marine tasks. In this paper, a novel conflict-free motion planning framework is introduced to enhance underwater vehicle's mission performance by completing maximum number of highest priority tasks in a limited time through a large scale waypoint cluttered operating field, and ensuring safe deployment during the mission. The proposed combinatorial route-path planner model takes the advantages of the biogeography-based optimization (BBO) algorithm toward satisfying objectives of both higher-lower level motion planners and guarantees maximization of the mission productivity for a single vehicle operation. The performance of the model is investigated under different scenarios including the particular cost constraints in time-varying operating fields. To show the reliability of the proposed model, performance of each motion planner assessed separately and then statistical analysis is undertaken to evaluate the total performance of the entire model. The simulation results indicate the stability of the contributed model and its feasible application for real experiments.