 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFeasibility Assessment of a Cost-Effective Two-Wheel Kian-I Mobile Robot for Autonomous Navigation
Paper and Code
Dec 10, 2020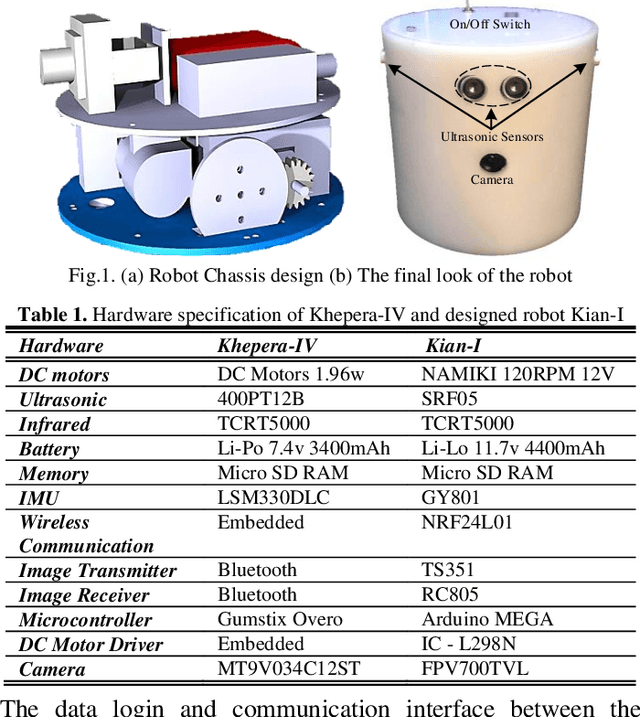
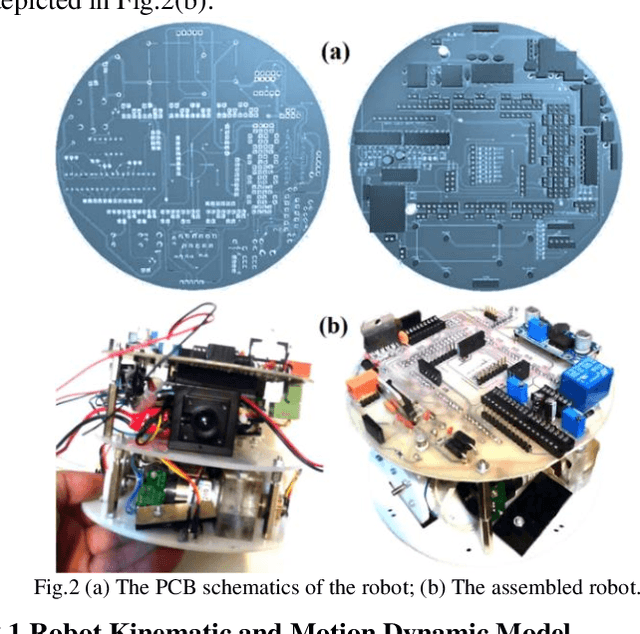
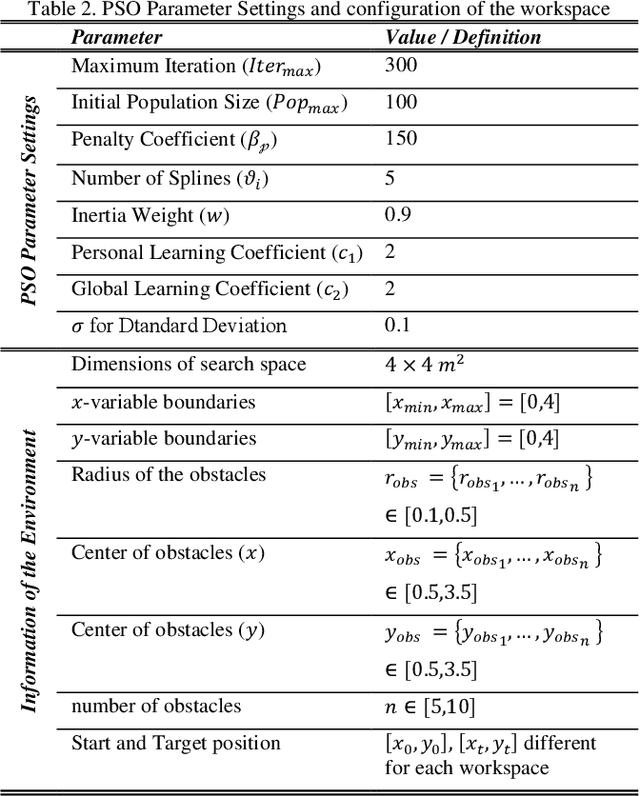
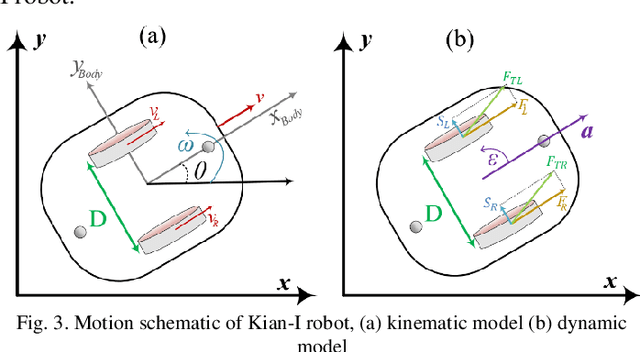
A two-wheeled mobile robot, namely Kian-I, is designed and prototyped in this research. The Kian-I is comparable with Khepera-IV in terms of dimensional specifications, mounted sensors, and performance capabilities and can be used for educational purposes and cost-effective experimental tests. A motion control architecture is designed for Kian-I in this study to facilitate accurate navigation for the robot in an immersive environment. The implemented control structure consists of two main components of the path recommender system and trajectory tracking controller. Given partial knowledge about the operation field, the path recommender system adopts B-spline curves and Particle Swarm Optimization (PSO) algorithm to determine a collision-free path curve with translational velocity constraint. The provided optimal reference path feeds into the trajectory tracking controller enabling Kian-I to navigate autonomously in the operating field. The trajectory tracking module eliminate the error between the desired path and the followed trajectory through controlling the wheels' velocity. To assess the feasibility of the proposed control architecture, the performance of Kian-I robot in autonomous navigation from any arbitrary initial pose to a target of interest is evaluated through numerous simulation and experimental studies. The experimental results demonstrate the functional capacities and performance of the prototyped robot to be used as a benchmark for investigation and verification of various mobile robot algorithms in the laboratory environment.