 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Cooperative Dynamic Task Assignment Framework for COTSBot AUVs
Jan 11, 2021
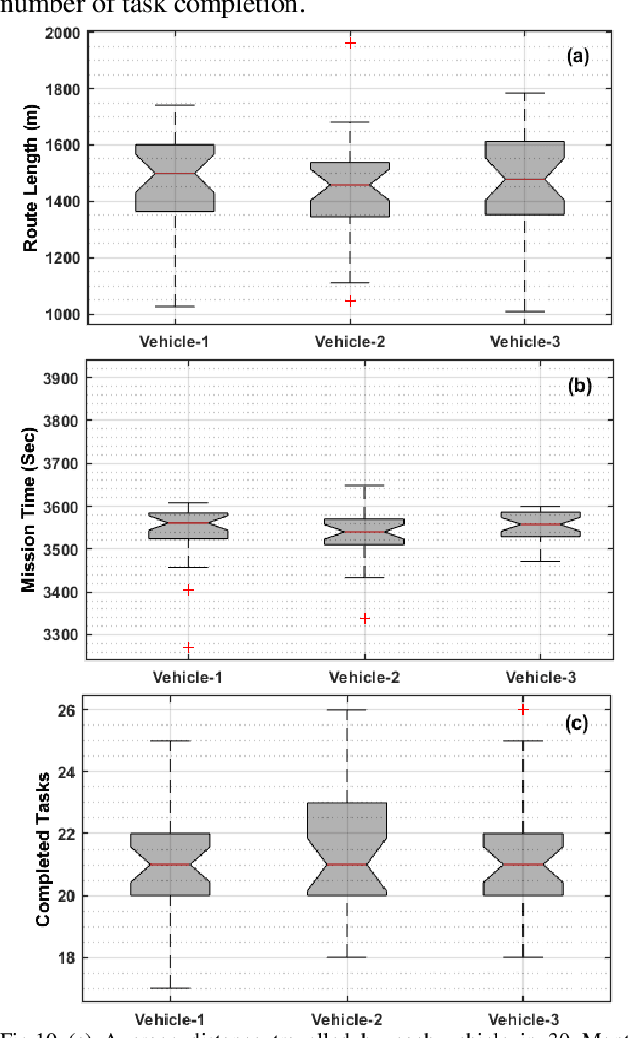
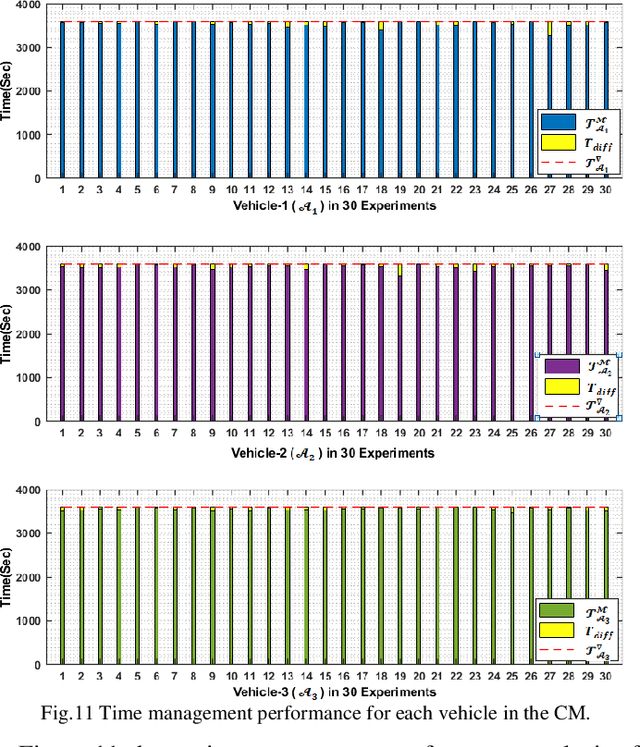
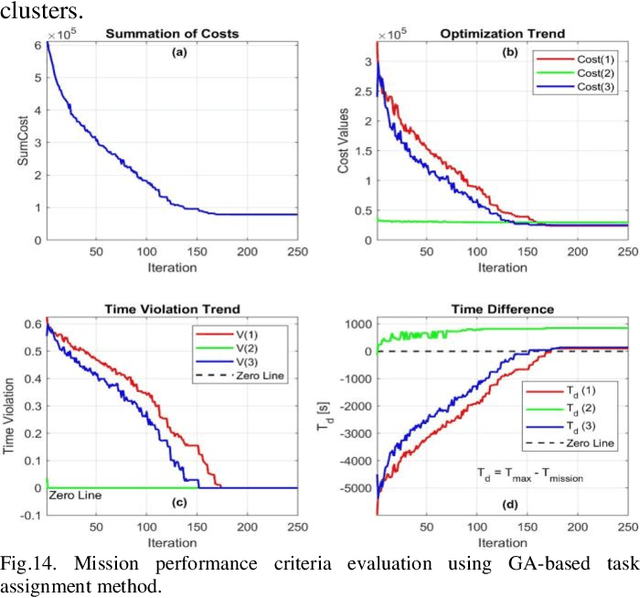
This paper presents a cooperative dynamic task assignment framework for a certain class of Autonomous Underwater Vehicles (AUVs) employed to control outbreak of Crown-Of-Thorns Starfish (COTS) in Australia's Great Barrier Reef. The problem of monitoring and controlling the COTS is transcribed into a constrained task assignment problem in which eradicating clusters of COTS, by the injection system of COTSbot AUVs, is considered as a task. A probabilistic map of the operating environment including seabed terrain, clusters of COTS, and coastlines is constructed. Then, a novel heuristic algorithm called Heuristic Fleet Cooperation (HFC) is developed to provide a cooperative injection of the COTSbot AUVs to the maximum possible COTS in an assigned mission time. Extensive simulation studies together with quantitative performance analysis are conducted to demonstrate the effectiveness and robustness of the proposed cooperative task assignment algorithm in eradicating the COTS in the Great Barrier Reef.
Feasibility Assessment of a Cost-Effective Two-Wheel Kian-I Mobile Robot for Autonomous Navigation
Dec 10, 2020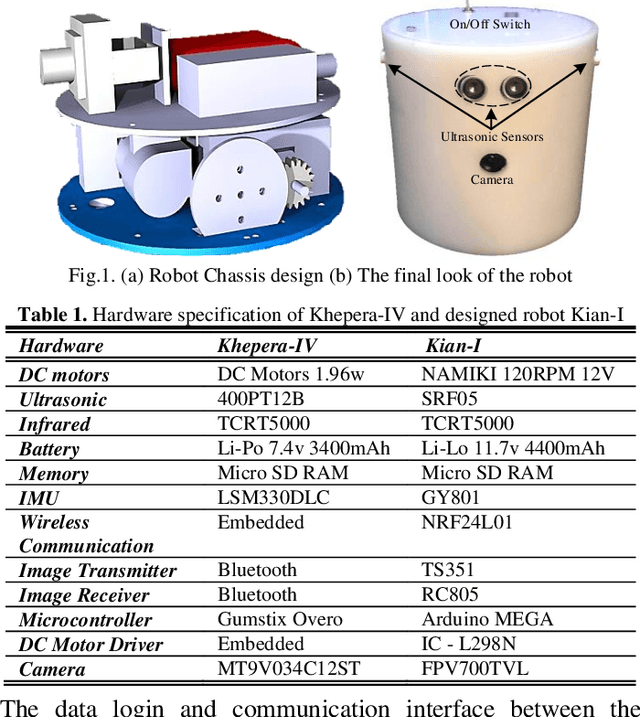
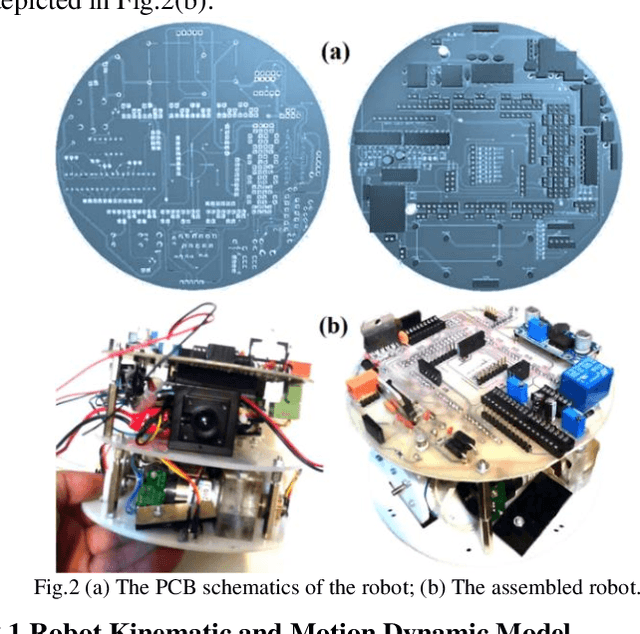
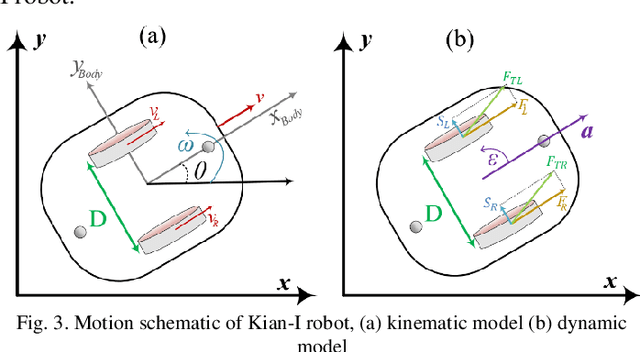
A two-wheeled mobile robot, namely Kian-I, is designed and prototyped in this research. The Kian-I is comparable with Khepera-IV in terms of dimensional specifications, mounted sensors, and performance capabilities and can be used for educational purposes and cost-effective experimental tests. A motion control architecture is designed for Kian-I in this study to facilitate accurate navigation for the robot in an immersive environment. The implemented control structure consists of two main components of the path recommender system and trajectory tracking controller. Given partial knowledge about the operation field, the path recommender system adopts B-spline curves and Particle Swarm Optimization (PSO) algorithm to determine a collision-free path curve with translational velocity constraint. The provided optimal reference path feeds into the trajectory tracking controller enabling Kian-I to navigate autonomously in the operating field. The trajectory tracking module eliminate the error between the desired path and the followed trajectory through controlling the wheels' velocity. To assess the feasibility of the proposed control architecture, the performance of Kian-I robot in autonomous navigation from any arbitrary initial pose to a target of interest is evaluated through numerous simulation and experimental studies. The experimental results demonstrate the functional capacities and performance of the prototyped robot to be used as a benchmark for investigation and verification of various mobile robot algorithms in the laboratory environment.
Autonomy and Unmanned Vehicles Augmented Reactive Mission-Motion Planning Architecture for Autonomous Vehicles
Jul 19, 2020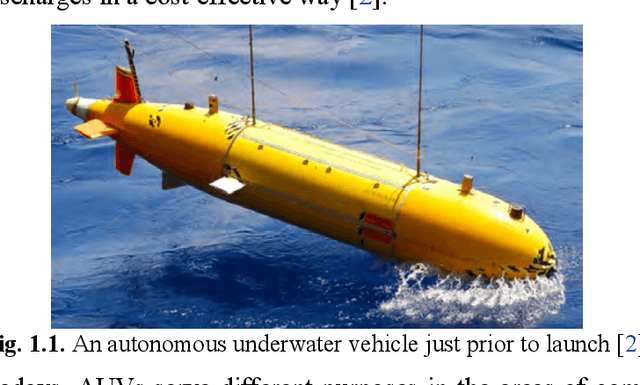
Advances in hardware technology have facilitated more integration of sophisticated software toward augmenting the development of Unmanned Vehicles (UVs) and mitigating constraints for onboard intelligence. As a result, UVs can operate in complex missions where continuous trans-formation in environmental condition calls for a higher level of situational responsiveness and autonomous decision making. This book is a research monograph that aims to provide a comprehensive survey of UVs autonomy and its related properties in internal and external situation awareness to-ward robust mission planning in severe conditions. An advance level of intelligence is essential to minimize the reliance on the human supervisor, which is a main concept of autonomy. A self-controlled system needs a robust mission management strategy to push the boundaries towards autonomous structures, and the UV should be aware of its internal state and capabilities to assess whether current mission goal is achievable or find an alternative solution. In this book, the AUVs will become the major case study thread but other cases/types of vehicle will also be considered. In-deed the research monograph, the review chapters and the new approaches we have developed would be appropriate for use as a reference in upper years or postgraduate degrees for its coverage of literature and algorithms relating to Robot/Vehicle planning, tasking, routing, and trust.
Single Image Dehazing Algorithm Based on Sky Region Segmentation
Jul 10, 2020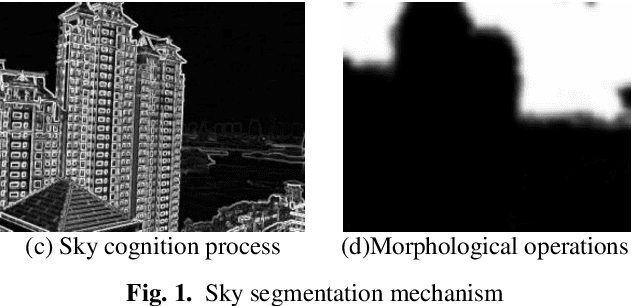
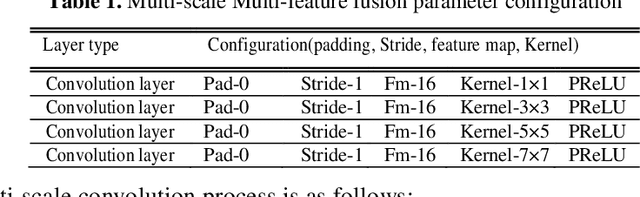
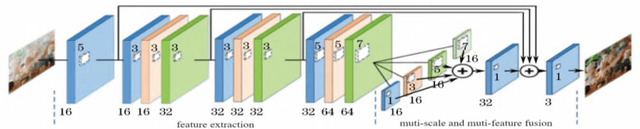
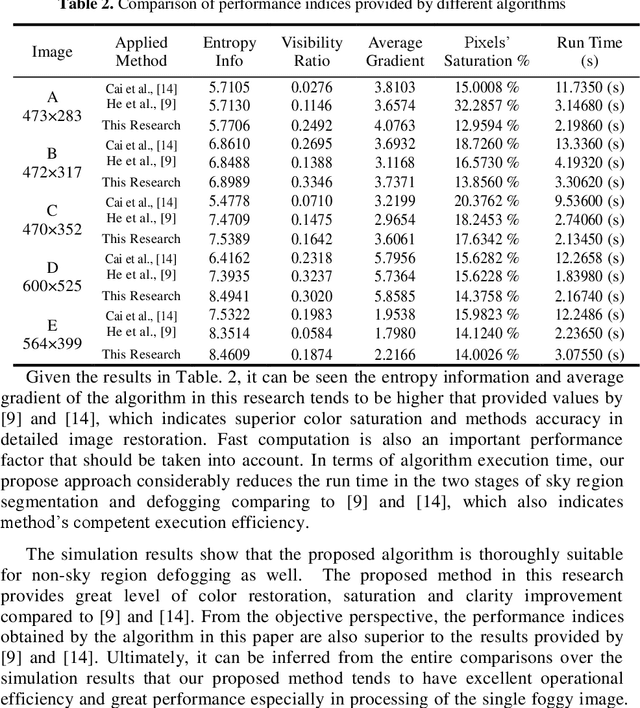
In this paper a hybrid image defogging approach based on region segmentation is proposed to address the dark channel priori algorithm's shortcomings in de-fogging the sky regions. The preliminary stage of the proposed approach focuses on the segmentation of sky and non-sky regions in a foggy image taking the advantageous of Meanshift and edge detection with embedded confidence. In the second stage, an improved dark channel priori algorithm is employed to defog the non-sky region. Ultimately, the sky area is processed by DehazeNet algorithm, which relies on deep learning Convolutional Neural Networks. The simulation results show that the proposed hybrid approach in this research addresses the problem of color distortion associated with sky regions in foggy images. The approach greatly improves the image quality indices including entropy information, visibility ratio of the edges, average gradient, and the saturation percentage with a very fast computation time, which is a good indication of the excellent performance of this model.
Current Advancements on Autonomous Mission Planning and Management Systems: an AUV and UAV perspective
Jul 10, 2020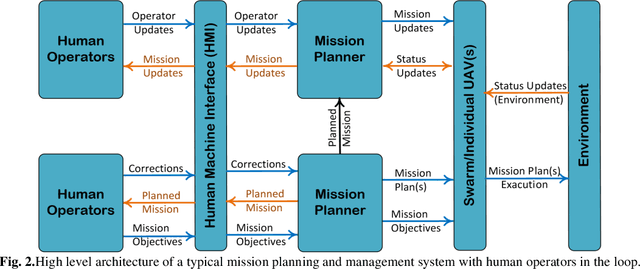
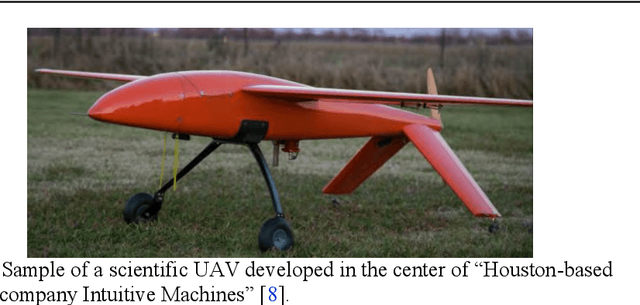
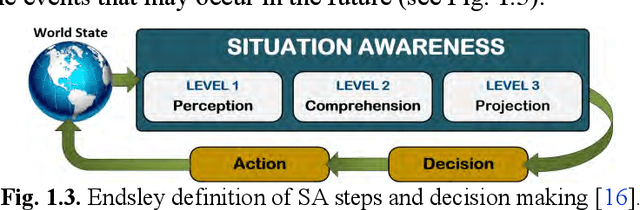
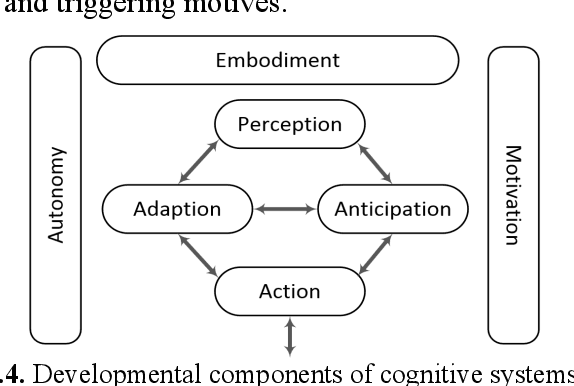
Advances in hardware technology have enabled more integration of sophisticated software, triggering progress in the development and employment of Unmanned Vehicles (UVs), and mitigating restraints for onboard intelligence. As a result, UVs can now take part in more complex mission where continuous transformation in environmental condition calls for a higher level of situational responsiveness. This paper serves as an introduction to UVs mission planning and management systems aiming to highlight some of the recent developments in the field of autonomous underwater and aerial vehicles in addition to stressing some possible future directions and discussing the learned lessons. A comprehensive survey over autonomy assessment of UVs, and different aspects of autonomy such as situation awareness, cognition, and decision-making has been provided in this study. The paper separately explains the humanoid and autonomous system's performance and highlights the role and impact of a human in UVs operations.