 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVis-CRF, A Classical Receptive Field Model for VISION
Nov 17, 2020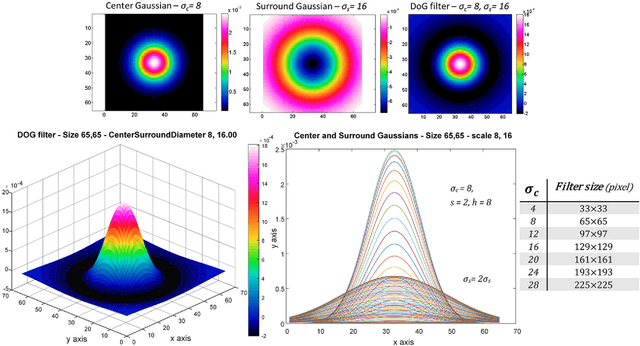
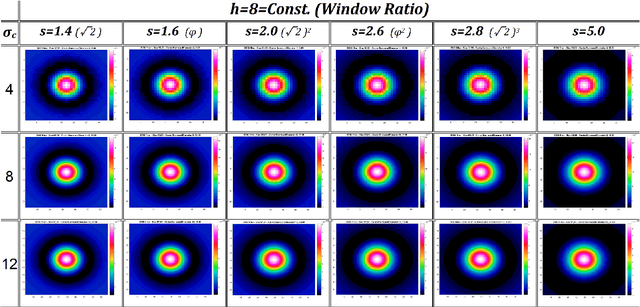
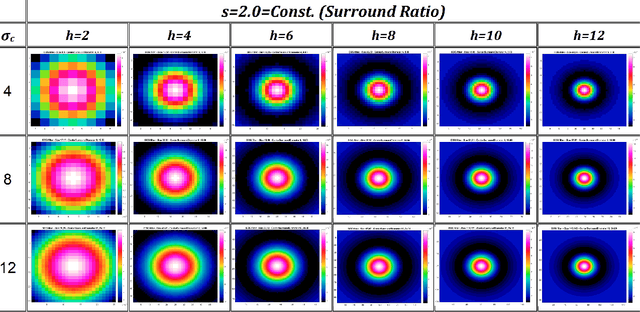
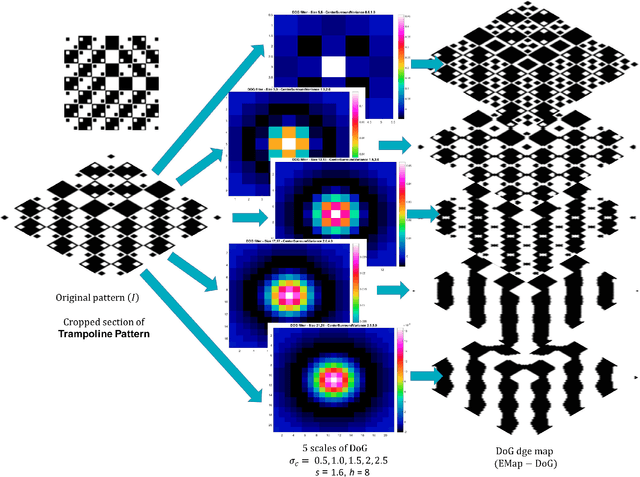
Over the last decade, a variety of new neurophysiological experiments have led to new insights as to how, when and where retinal processing takes place, and the nature of the retinal representation encoding sent to the cortex for further processing. Based on these neurobiological discoveries, in our previous work, we provided computer simulation evidence to suggest that Geometrical illusions are explained in part, by the interaction of multiscale visual processing performed in the retina. The output of our retinal stage model, named Vis-CRF, is presented here for a sample of natural image and for several types of Tilt Illusion, in which the final tilt percept arises from multiple scale processing of Difference of Gaussians (DoG) and the perceptual interaction of foreground and background elements (Nematzadeh and Powers, 2019; Nematzadeh, 2018; Nematzadeh, Powers and Lewis, 2017; Nematzadeh, Lewis and Powers, 2015).
Autonomy and Unmanned Vehicles Augmented Reactive Mission-Motion Planning Architecture for Autonomous Vehicles
Jul 19, 2020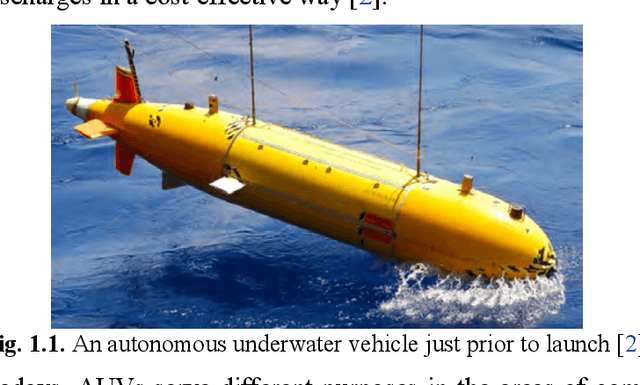
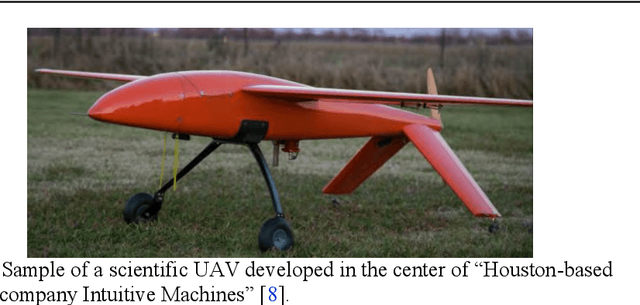
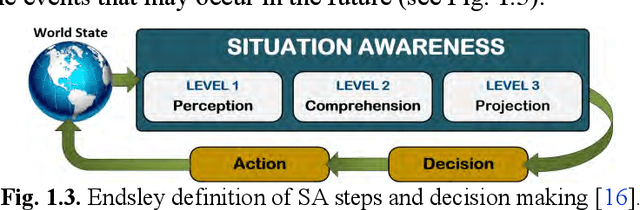
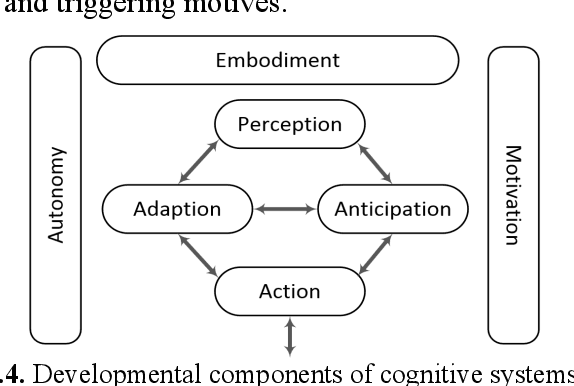
Advances in hardware technology have facilitated more integration of sophisticated software toward augmenting the development of Unmanned Vehicles (UVs) and mitigating constraints for onboard intelligence. As a result, UVs can operate in complex missions where continuous trans-formation in environmental condition calls for a higher level of situational responsiveness and autonomous decision making. This book is a research monograph that aims to provide a comprehensive survey of UVs autonomy and its related properties in internal and external situation awareness to-ward robust mission planning in severe conditions. An advance level of intelligence is essential to minimize the reliance on the human supervisor, which is a main concept of autonomy. A self-controlled system needs a robust mission management strategy to push the boundaries towards autonomous structures, and the UV should be aware of its internal state and capabilities to assess whether current mission goal is achievable or find an alternative solution. In this book, the AUVs will become the major case study thread but other cases/types of vehicle will also be considered. In-deed the research monograph, the review chapters and the new approaches we have developed would be appropriate for use as a reference in upper years or postgraduate degrees for its coverage of literature and algorithms relating to Robot/Vehicle planning, tasking, routing, and trust.
Toward Efficient Task Assignment and Motion Planning for Large Scale Underwater Mission
Jun 15, 2016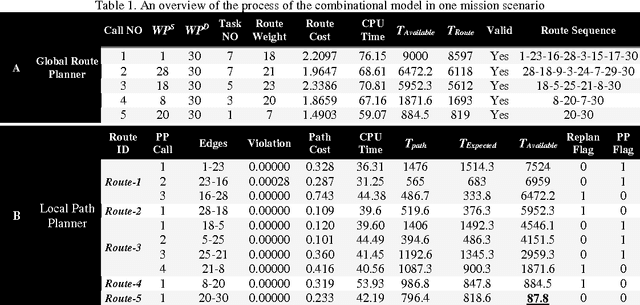
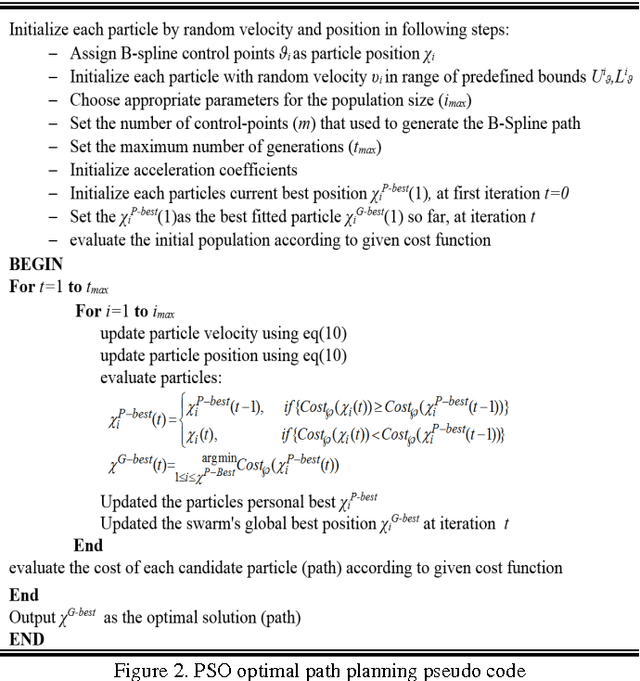
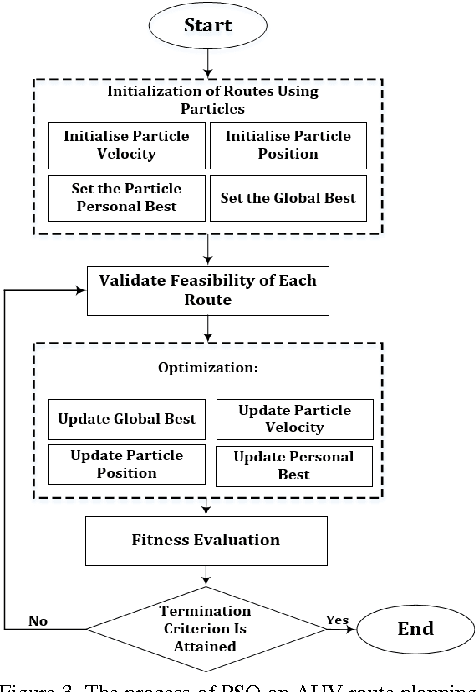
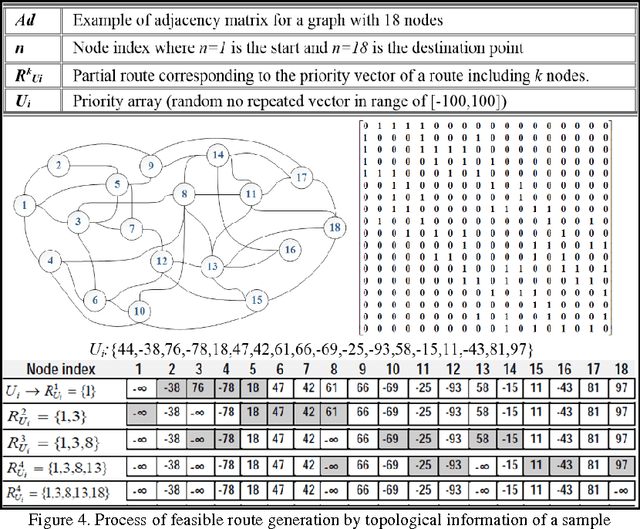
An Autonomous Underwater Vehicle (AUV) needs to acquire a certain degree of autonomy for any particular underwater mission to fulfill the mission objectives successfully and ensure its safety in all stages of the mission in a large scale operating filed. In this paper, a novel combinatorial conflict-free-task assignment strategy consisting an interactive engagement of a local path planner and an adaptive global route planner, is introduced. The method is established upon the heuristic search potency of the Particle Swarm Optimisation (PSO) algorithm to address the discrete nature of routing-task assignment approach and the complexity of NP-hard path planning problem. The proposed hybrid method is highly efficient for having a reactive guidance framework that guarantees successful completion of missions specifically in cluttered environments. To examine the performance of the method in a context of mission productivity, mission time management and vehicle safety, a series of simulation studies are undertaken. The results of simulations declare that the proposed method is reliable and robust, particularly in dealing with uncertainties, and it can significantly enhance the level of vehicle's autonomy by relying on its reactive nature and capability of providing fast feasible solutions.
Biogeography-Based Combinatorial Strategy for Efficient AUV Motion Planning and Task-Time Management
Apr 26, 2016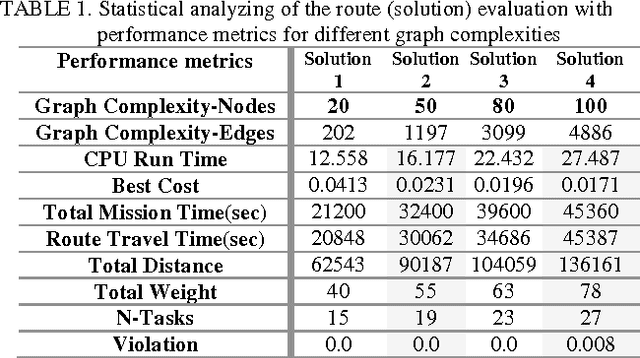
Autonomous Underwater Vehicles (AUVs) are capable of spending long periods of time for carrying out various underwater missions and marine tasks. In this paper, a novel conflict-free motion planning framework is introduced to enhance underwater vehicle's mission performance by completing maximum number of highest priority tasks in a limited time through a large scale waypoint cluttered operating field, and ensuring safe deployment during the mission. The proposed combinatorial route-path planner model takes the advantages of the biogeography-based optimization (BBO) algorithm toward satisfying objectives of both higher-lower level motion planners and guarantees maximization of the mission productivity for a single vehicle operation. The performance of the model is investigated under different scenarios including the particular cost constraints in time-varying operating fields. To show the reliability of the proposed model, performance of each motion planner assessed separately and then statistical analysis is undertaken to evaluate the total performance of the entire model. The simulation results indicate the stability of the contributed model and its feasible application for real experiments.