 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Novel Efficient Task-Assign Route Planning Method for AUV Guidance in a Dynamic Cluttered Environment
Aug 02, 2016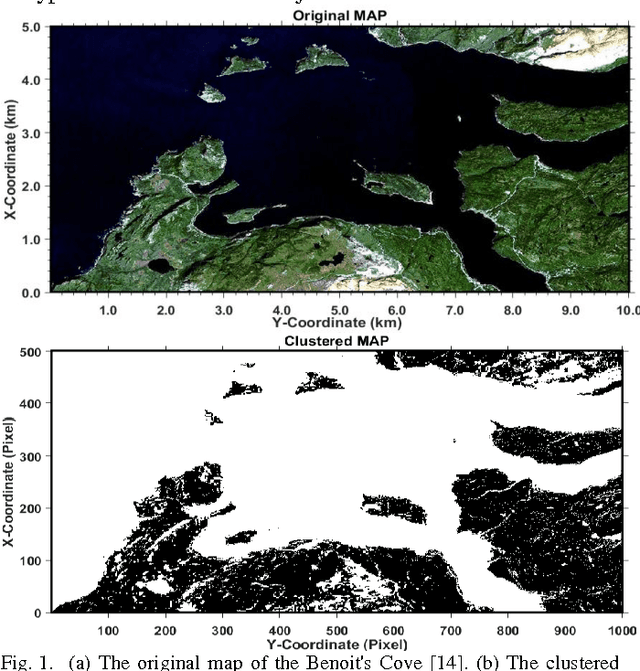
Promoting the levels of autonomy facilitates the vehicle in performing long-range operations with minimum supervision. The capability of Autonomous Underwater Vehicles (AUVs) to fulfill the mission objectives is directly influenced by route planning and task assignment system performance. The system fives the error of "Bad character(s) in field Abstract" for no reason. Please refer to manuscript for the full abstract
AUV Rendezvous Online Path Planning in a Highly Cluttered Undersea Environment Using Evolutionary Algorithms
Jun 15, 2016In this study, a single autonomous underwater vehicle (AUV) aims to rendezvous with a submerged leader recovery vehicle through a cluttered and variable operating field. The rendezvous problem is transformed into a nonlinear optimal control problem (NOCP) and then numerical solutions are provided. A penalty function method is utilized to combine the boundary conditions, vehicular and environmental constraints with the performance index that is final rendezvous time.Four evolutionary based path planning methods namely particle swarm optimization (PSO), biogeography-based optimization (BBO), differential evolution (DE) and Firefly algorithm (FA) are employed to establish a reactive planner module and provide a numerical solution for the proposed NOCP. The objective is to synthesize and analysis the performance and capability of the mentioned methods for guiding an AUV from loitering point toward the rendezvous place through a comprehensive simulation study.The proposed planner module entails a heuristic for refining the path considering situational awareness of underlying environment, encompassing static and dynamic obstacles overwhelmed in spatiotemporal current vectors.This leads to accommodate the unforeseen changes in the operating field like emergence of unpredicted obstacles or variability of current vector filed and turbulent regions. The simulation results demonstrate the inherent robustness and significant efficiency of the proposed planner in enhancement of the vehicle's autonomy in terms of using current force, coping undesired current disturbance for the desired rendezvous purpose. Advantages and shortcoming of all utilized methods are also presented based on the obtained results.
A Novel Versatile Architecture for Autonomous Underwater Vehicle's Motion Planning and Task Assignment
Jun 15, 2016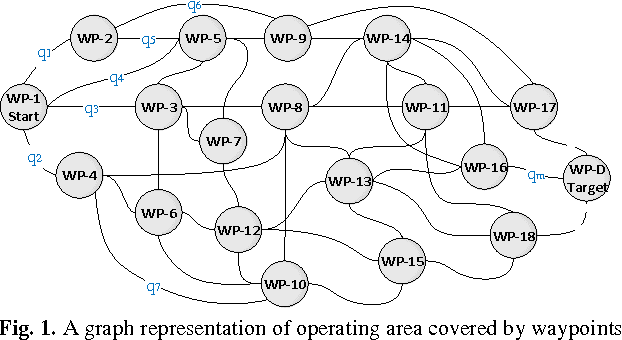
Expansion of today's underwater scenarios and missions necessitates the requestion for robust decision making of the Autonomous Underwater Vehicle (AUV); hence, design an efficient decision making framework is essential for maximizing the mission productivity in a restricted time. This paper focuses on developing a deliberative conflict-free-task assignment architecture encompassing a Global Route Planner (GRP) and a Local Path Planner (LPP) to provide consistent motion planning encountering both environmental dynamic changes and a priori knowledge of the terrain, so that the AUV is reactively guided to the target of interest in the context of an unknown underwater environment. The architecture involves three main modules: The GRP module at the top level deals with the task priority assignment, mission time management, and determination of a feasible route between start and destination point in a large scale environment. The LPP module at the lower level deals with safety considerations and generates collision-free optimal trajectory between each specific pair of waypoints listed in obtained global route. Re-planning module tends to promote robustness and reactive ability of the AUV with respect to the environmental changes. The experimental results for different simulated missions, demonstrate the inherent robustness and drastic efficiency of the proposed scheme in enhancement of the vehicles autonomy in terms of mission productivity, mission time management, and vehicle safety.
Toward Efficient Task Assignment and Motion Planning for Large Scale Underwater Mission
Jun 15, 2016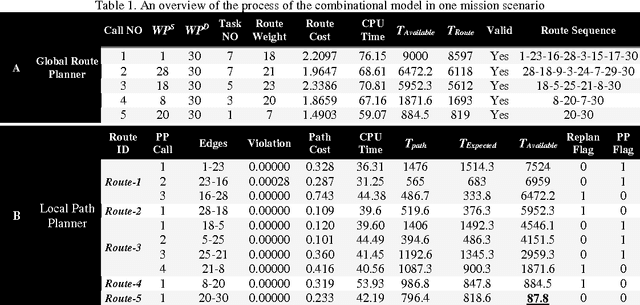
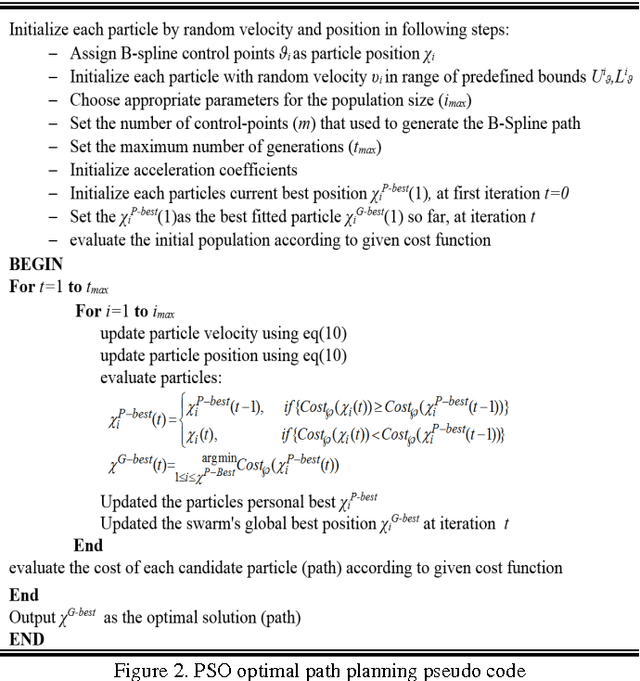
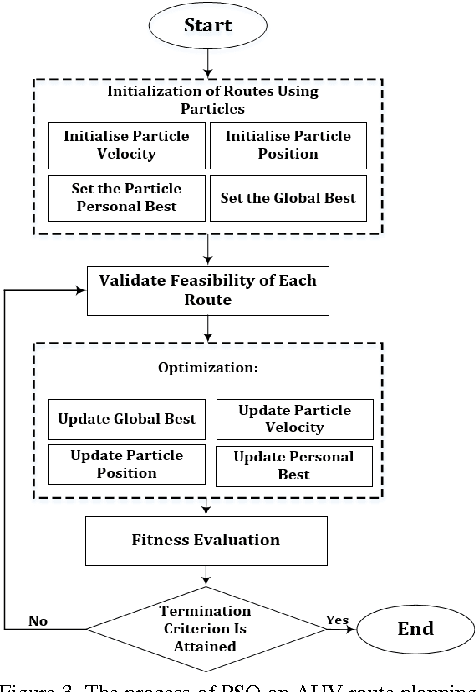
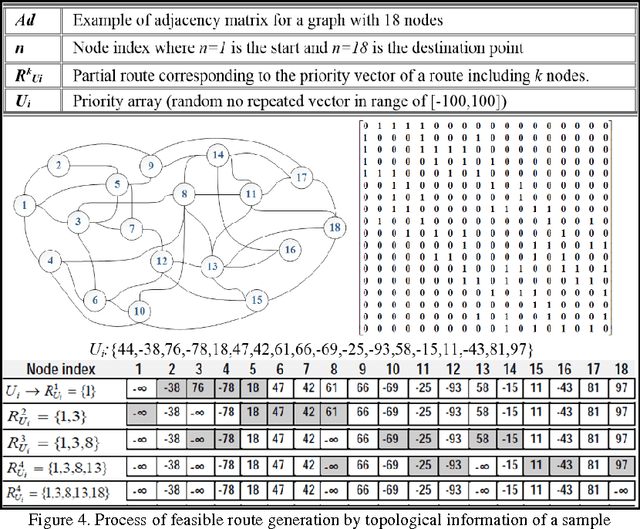
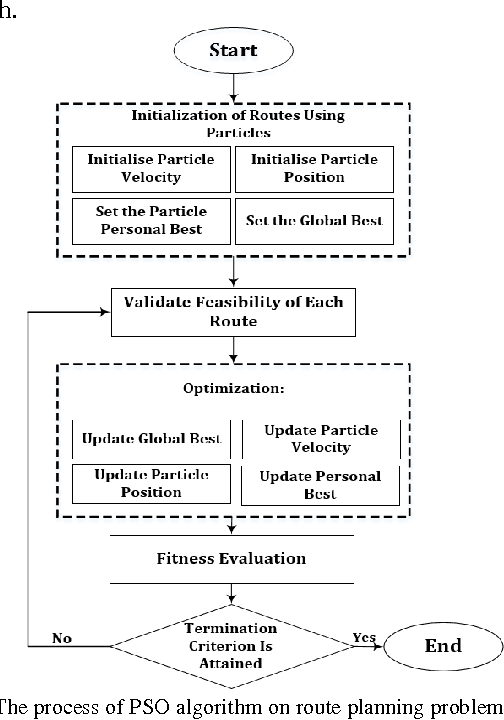
An Autonomous Underwater Vehicle (AUV) needs to acquire a certain degree of autonomy for any particular underwater mission to fulfill the mission objectives successfully and ensure its safety in all stages of the mission in a large scale operating filed. In this paper, a novel combinatorial conflict-free-task assignment strategy consisting an interactive engagement of a local path planner and an adaptive global route planner, is introduced. The method is established upon the heuristic search potency of the Particle Swarm Optimisation (PSO) algorithm to address the discrete nature of routing-task assignment approach and the complexity of NP-hard path planning problem. The proposed hybrid method is highly efficient for having a reactive guidance framework that guarantees successful completion of missions specifically in cluttered environments. To examine the performance of the method in a context of mission productivity, mission time management and vehicle safety, a series of simulation studies are undertaken. The results of simulations declare that the proposed method is reliable and robust, particularly in dealing with uncertainties, and it can significantly enhance the level of vehicle's autonomy by relying on its reactive nature and capability of providing fast feasible solutions.
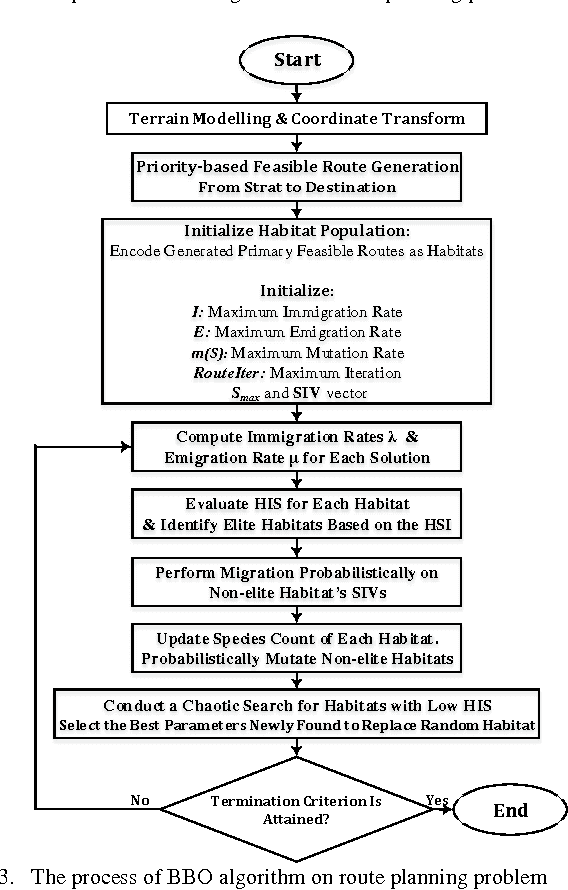
Biogeography-Based Combinatorial Strategy for Efficient AUV Motion Planning and Task-Time Management
Apr 26, 2016
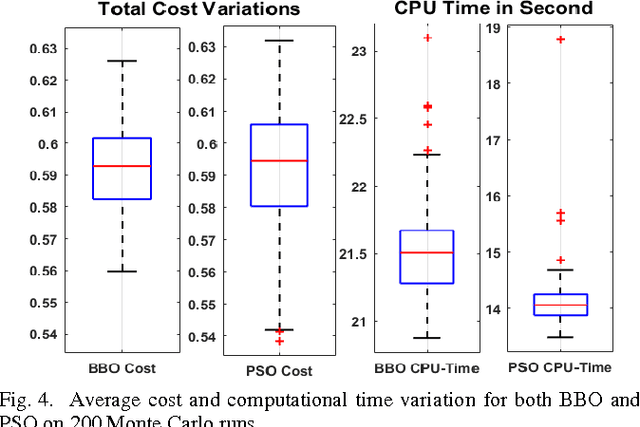
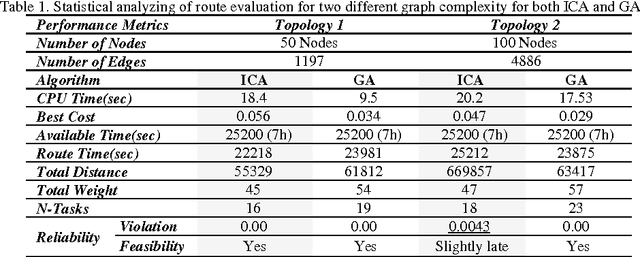
Autonomous Underwater Vehicles (AUVs) are capable of spending long periods of time for carrying out various underwater missions and marine tasks. In this paper, a novel conflict-free motion planning framework is introduced to enhance underwater vehicle's mission performance by completing maximum number of highest priority tasks in a limited time through a large scale waypoint cluttered operating field, and ensuring safe deployment during the mission. The proposed combinatorial route-path planner model takes the advantages of the biogeography-based optimization (BBO) algorithm toward satisfying objectives of both higher-lower level motion planners and guarantees maximization of the mission productivity for a single vehicle operation. The performance of the model is investigated under different scenarios including the particular cost constraints in time-varying operating fields. To show the reliability of the proposed model, performance of each motion planner assessed separately and then statistical analysis is undertaken to evaluate the total performance of the entire model. The simulation results indicate the stability of the contributed model and its feasible application for real experiments.