 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMusic-Driven Legged Robots: Synchronized Walking to Rhythmic Beats
Mar 06, 2025We address the challenge of effectively controlling the locomotion of legged robots by incorporating precise frequency and phase characteristics, which is often ignored in locomotion policies that do not account for the periodic nature of walking. We propose a hierarchical architecture that integrates a low-level phase tracker, oscillators, and a high-level phase modulator. This controller allows quadruped robots to walk in a natural manner that is synchronized with external musical rhythms. Our method generates diverse gaits across different frequencies and achieves real-time synchronization with music in the physical world. This research establishes a foundational framework for enabling real-time execution of accurate rhythmic motions in legged robots. Video is available at website: https://music-walker.github.io/.
Continuous Control of Diverse Skills in Quadruped Robots Without Complete Expert Datasets
Mar 05, 2025Learning diverse skills for quadruped robots presents significant challenges, such as mastering complex transitions between different skills and handling tasks of varying difficulty. Existing imitation learning methods, while successful, rely on expensive datasets to reproduce expert behaviors. Inspired by introspective learning, we propose Progressive Adversarial Self-Imitation Skill Transition (PASIST), a novel method that eliminates the need for complete expert datasets. PASIST autonomously explores and selects high-quality trajectories based on predefined target poses instead of demonstrations, leveraging the Generative Adversarial Self-Imitation Learning (GASIL) framework. To further enhance learning, We develop a skill selection module to mitigate mode collapse by balancing the weights of skills with varying levels of difficulty. Through these methods, PASIST is able to reproduce skills corresponding to the target pose while achieving smooth and natural transitions between them. Evaluations on both simulation platforms and the Solo 8 robot confirm the effectiveness of PASIST, offering an efficient alternative to expert-driven learning.
Multi-Task Learning of Active Fault-Tolerant Controller for Leg Failures in Quadruped robots
Feb 14, 2024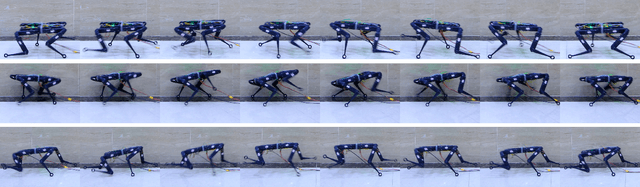
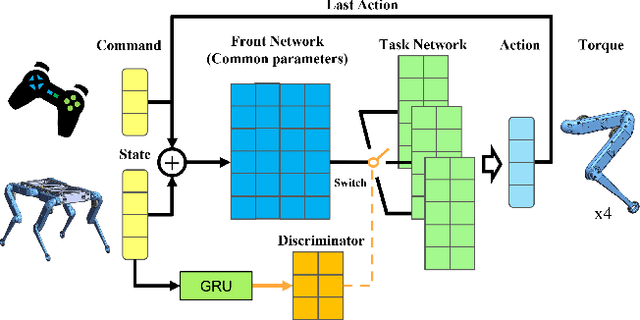
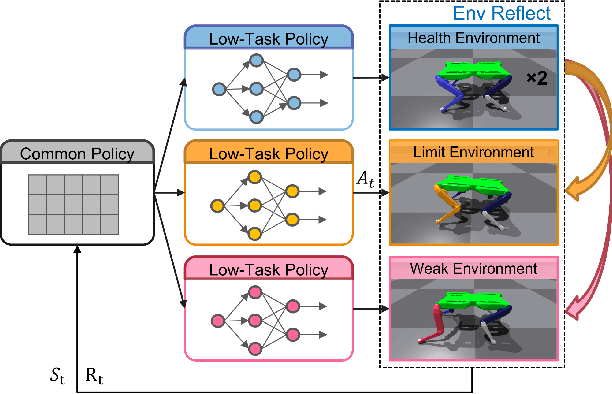
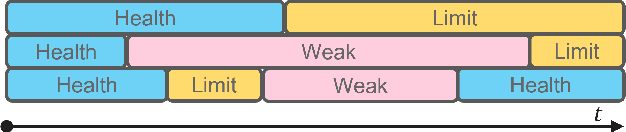
Electric quadruped robots used in outdoor exploration are susceptible to leg-related electrical or mechanical failures. Unexpected joint power loss and joint locking can immediately pose a falling threat. Typically, controllers lack the capability to actively sense the condition of their own joints and take proactive actions. Maintaining the original motion patterns could lead to disastrous consequences, as the controller may produce irrational output within a short period of time, further creating the risk of serious physical injuries. This paper presents a hierarchical fault-tolerant control scheme employing a multi-task training architecture capable of actively perceiving and overcoming two types of leg joint faults. The architecture simultaneously trains three joint task policies for health, power loss, and locking scenarios in parallel, introducing a symmetric reflection initialization technique to ensure rapid and stable gait skill transformations. Experiments demonstrate that the control scheme is robust in unexpected scenarios where a single leg experiences concurrent joint faults in two joints. Furthermore, the policy retains the robot's planar mobility, enabling rough velocity tracking. Finally, zero-shot Sim2Real transfer is achieved on the real-world SOLO8 robot, countering both electrical and mechanical failures.
Context De-confounded Emotion Recognition
Mar 26, 2023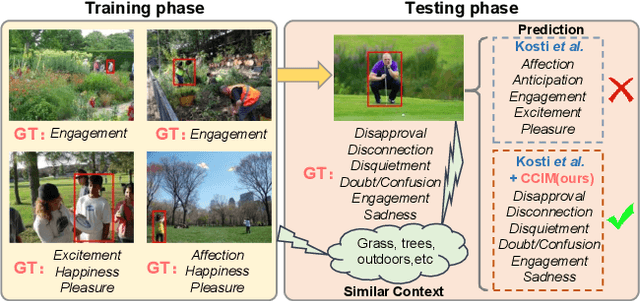
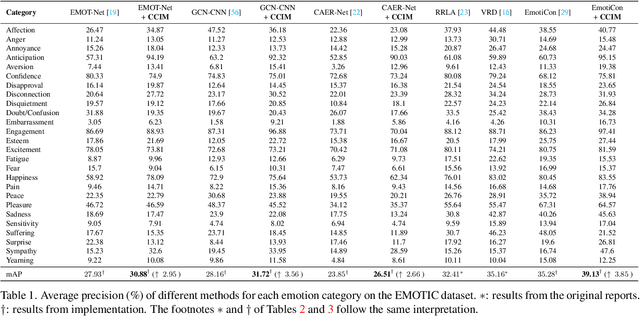
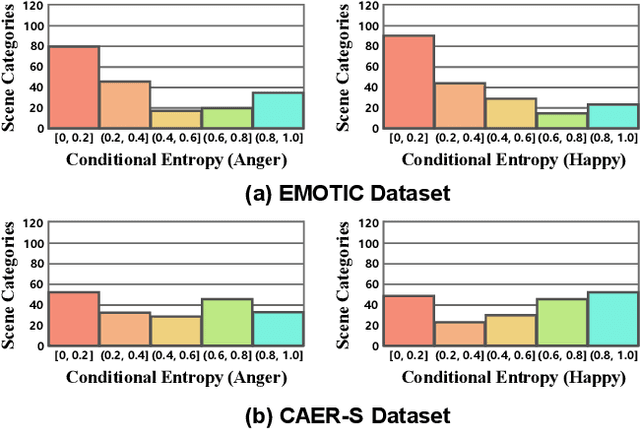

Context-Aware Emotion Recognition (CAER) is a crucial and challenging task that aims to perceive the emotional states of the target person with contextual information. Recent approaches invariably focus on designing sophisticated architectures or mechanisms to extract seemingly meaningful representations from subjects and contexts. However, a long-overlooked issue is that a context bias in existing datasets leads to a significantly unbalanced distribution of emotional states among different context scenarios. Concretely, the harmful bias is a confounder that misleads existing models to learn spurious correlations based on conventional likelihood estimation, significantly limiting the models' performance. To tackle the issue, this paper provides a causality-based perspective to disentangle the models from the impact of such bias, and formulate the causalities among variables in the CAER task via a tailored causal graph. Then, we propose a Contextual Causal Intervention Module (CCIM) based on the backdoor adjustment to de-confound the confounder and exploit the true causal effect for model training. CCIM is plug-in and model-agnostic, which improves diverse state-of-the-art approaches by considerable margins. Extensive experiments on three benchmark datasets demonstrate the effectiveness of our CCIM and the significance of causal insight.