 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Task Learning of Active Fault-Tolerant Controller for Leg Failures in Quadruped robots
Paper and Code
Feb 14, 2024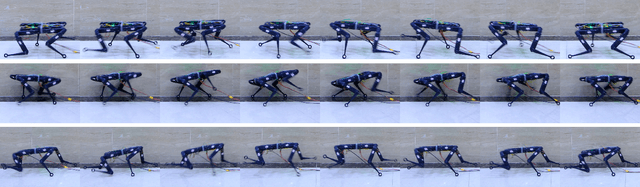
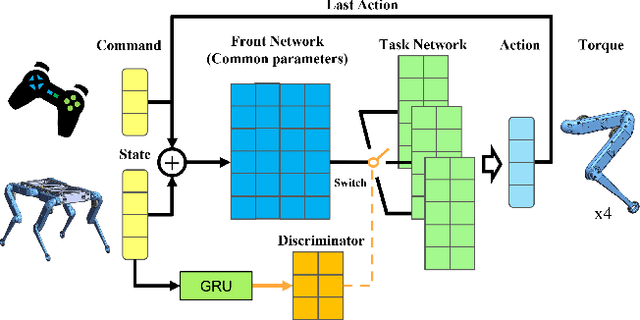
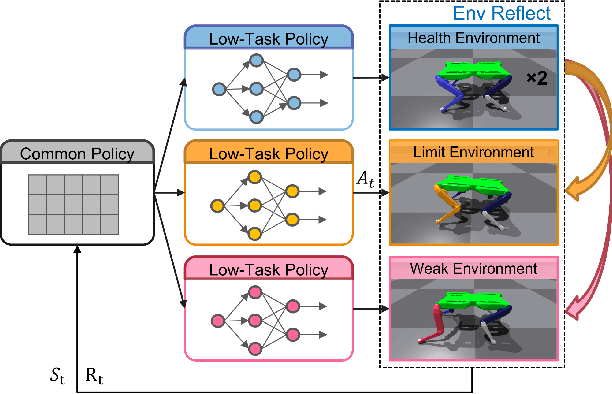
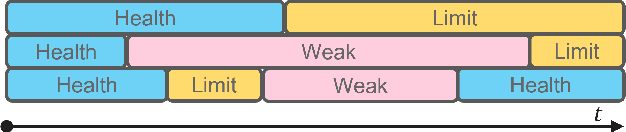
Electric quadruped robots used in outdoor exploration are susceptible to leg-related electrical or mechanical failures. Unexpected joint power loss and joint locking can immediately pose a falling threat. Typically, controllers lack the capability to actively sense the condition of their own joints and take proactive actions. Maintaining the original motion patterns could lead to disastrous consequences, as the controller may produce irrational output within a short period of time, further creating the risk of serious physical injuries. This paper presents a hierarchical fault-tolerant control scheme employing a multi-task training architecture capable of actively perceiving and overcoming two types of leg joint faults. The architecture simultaneously trains three joint task policies for health, power loss, and locking scenarios in parallel, introducing a symmetric reflection initialization technique to ensure rapid and stable gait skill transformations. Experiments demonstrate that the control scheme is robust in unexpected scenarios where a single leg experiences concurrent joint faults in two joints. Furthermore, the policy retains the robot's planar mobility, enabling rough velocity tracking. Finally, zero-shot Sim2Real transfer is achieved on the real-world SOLO8 robot, countering both electrical and mechanical failures.