 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThermodynamic-Inspired Explainable GeoAI: Uncovering Regime-Dependent Mechanisms in Heterogeneous Spatial Systems
Apr 06, 2026Modeling spatial heterogeneity and associated critical transitions remains a fundamental challenge in geography and environmental science. While conventional Geographically Weighted Regression (GWR) and deep learning models have improved predictive skill, they often fail to elucidate state-dependent nonlinearities where the functional roles of drivers represent opposing effects across heterogeneous domains. We introduce a thermodynamics-inspired explainable geospatial AI framework that integrates statistical mechanics with graph neural networks. By conceptualizing spatial variability as a thermodynamic competition between system Burden (E) and Capacity (S), our model disentangles the latent mechanisms driving spatial processes. Using three simulation datasets and three real-word datasets across distinct domains (housing markets, mental health prevalence, and wildfire-induced PM2.5 anomalies), we show that the new framework successfully identifies regime-dependent role reversals of predictors that standard baselines miss. Notably, the framework explicitly diagnoses the phase transition into a Burden-dominated regime during the 2023 Canadian wildfire event, distinguishing physical mechanism shifts from statistical outliers. These findings demonstrate that thermodynamic constraints can improve the interpretability of GeoAI while preserving strong predictive performance in complex spatial systems.
Towards Intelligent Geospatial Data Discovery: a knowledge graph-driven multi-agent framework powered by large language models
Mar 21, 2026The rapid growth in the volume, variety, and velocity of geospatial data has created data ecosystems that are highly distributed, heterogeneous, and semantically inconsistent. Existing data catalogs, portals, and infrastructures still rely largely on keyword-based search with limited semantic support, which often fails to capture user intent and leads to weak retrieval performance. To address these challenges, this study proposes a knowledge graph-driven multi-agent framework for intelligent geospatial data discovery, powered by large language models. The framework introduces a unified geospatial metadata ontology as a semantic mediation layer to align heterogeneous metadata standards across platforms and constructs a geospatial metadata knowledge graph to explicitly model datasets and their multidimensional relationships. Building on the structured representation, the framework adopts a multi-agent collaborative architecture to perform intent parsing, knowledge graph retrieval, and answer synthesis, forming an interpretable and closed-loop discovery process from user queries to results. Results from representative use cases and performance evaluation show that the framework substantially improves intent matching accuracy, ranking quality, recall, and discovery transparency compared with traditional systems. This study advances geospatial data discovery toward a more semantic, intent-aware, and intelligent paradigm, providing a practical foundation for next-generation intelligent and autonomous spatial data infrastructures and contributing to the broader vision of Autonomous GIS.
M-SGWR: Multiscale Similarity and Geographically Weighted Regression
Jan 27, 2026The first law of geography is a cornerstone of spatial analysis, emphasizing that nearby and related locations tend to be more similar, however, defining what constitutes "near" and "related" remains challenging, as different phenomena exhibit distinct spatial patterns. Traditional local regression models, such as Geographically Weighted Regression (GWR) and Multiscale GWR (MGWR), quantify spatial relationships solely through geographic proximity. In an era of globalization and digital connectivity, however, geographic proximity alone may be insufficient to capture how locations are interconnected. To address this limitation, we propose a new multiscale local regression framework, termed M-SGWR, which characterizes spatial interaction across two dimensions: geographic proximity and attribute (variable) similarity. For each predictor, geographic and attribute-based weight matrices are constructed separately and then combined using an optimized parameter, alpha, which governs their relative contribution to local model fitting. Analogous to variable-specific bandwidths in MGWR, the optimal alpha varies by predictor, allowing the model to flexibly account for geographic, mixed, or non-spatial (remote similarity) effects. Results from two simulation experiments and one empirical application demonstrate that M-SGWR consistently outperforms GWR, SGWR, and MGWR across all goodness-of-fit metrics.
SIM: A mapping framework for built environment auditing based on street view imagery
May 29, 2025Built environment auditing refers to the systematic documentation and assessment of urban and rural spaces' physical, social, and environmental characteristics, such as walkability, road conditions, and traffic lights. It is used to collect data for the evaluation of how built environments impact human behavior, health, mobility, and overall urban functionality. Traditionally, built environment audits were conducted using field surveys and manual observations, which were time-consuming and costly. The emerging street view imagery, e.g., Google Street View, has become a widely used data source for conducting built environment audits remotely. Deep learning and computer vision techniques can extract and classify objects from street images to enhance auditing productivity. Before meaningful analysis, the detected objects need to be geospatially mapped for accurate documentation. However, the mapping methods and tools based on street images are underexplored, and there are no universal frameworks or solutions yet, imposing difficulties in auditing the street objects. In this study, we introduced an open source street view mapping framework, providing three pipelines to map and measure: 1) width measurement for ground objects, such as roads; 2) 3D localization for objects with a known dimension (e.g., doors and stop signs); and 3) diameter measurements (e.g., street trees). These pipelines can help researchers, urban planners, and other professionals automatically measure and map target objects, promoting built environment auditing productivity and accuracy. Three case studies, including road width measurement, stop sign localization, and street tree diameter measurement, are provided in this paper to showcase pipeline usage.
GIScience in the Era of Artificial Intelligence: A Research Agenda Towards Autonomous GIS
Apr 01, 2025The advent of generative AI exemplified by large language models (LLMs) opens new ways to represent and compute geographic information and transcend the process of geographic knowledge production, driving geographic information systems (GIS) towards autonomous GIS. Leveraging LLMs as the decision core, autonomous GIS can independently generate and execute geoprocessing workflows to perform spatial analysis. In this vision paper, we elaborate on the concept of autonomous GIS and present a framework that defines its five autonomous goals, five levels of autonomy, five core functions, and three operational scales. We demonstrate how autonomous GIS could perform geospatial data retrieval, spatial analysis, and map making with four proof-of-concept GIS agents. We conclude by identifying critical challenges and future research directions, including fine-tuning and self-growing decision cores, autonomous modeling, and examining the ethical and practical implications of autonomous GIS. By establishing the groundwork for a paradigm shift in GIScience, this paper envisions a future where GIS moves beyond traditional workflows to autonomously reason, derive, innovate, and advance solutions to pressing global challenges.
GIS Copilot: Towards an Autonomous GIS Agent for Spatial Analysis
Nov 05, 2024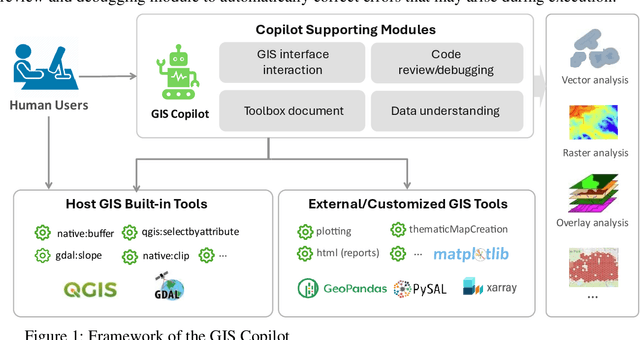
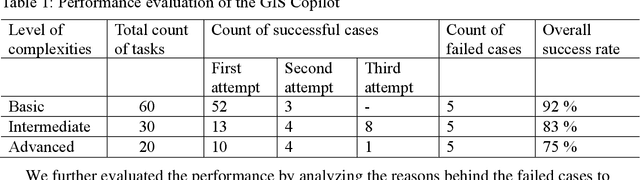


Recent advancements in Generative AI offer promising capabilities for spatial analysis. Despite their potential, the integration of generative AI with established GIS platforms remains underexplored. In this study, we propose a framework for integrating LLMs directly into existing GIS platforms, using QGIS as an example. Our approach leverages the reasoning and programming capabilities of LLMs to autonomously generate spatial analysis workflows and code through an informed agent that has comprehensive documentation of key GIS tools and parameters. The implementation of this framework resulted in the development of a "GIS Copilot" that allows GIS users to interact with QGIS using natural language commands for spatial analysis. The GIS Copilot was evaluated based on three complexity levels: basic tasks that require one GIS tool and typically involve one data layer to perform simple operations; intermediate tasks involving multi-step processes with multiple tools, guided by user instructions; and advanced tasks which involve multi-step processes that require multiple tools but not guided by user instructions, necessitating the agent to independently decide on and executes the necessary steps. The evaluation reveals that the GIS Copilot demonstrates strong potential in automating foundational GIS operations, with a high success rate in tool selection and code generation for basic and intermediate tasks, while challenges remain in achieving full autonomy for more complex tasks. This study contributes to the emerging vision of Autonomous GIS, providing a pathway for non-experts to engage with geospatial analysis with minimal prior expertise. While full autonomy is yet to be achieved, the GIS Copilot demonstrates significant potential for simplifying GIS workflows and enhancing decision-making processes.
Beyond Words: Evaluating Large Language Models in Transportation Planning
Sep 22, 2024
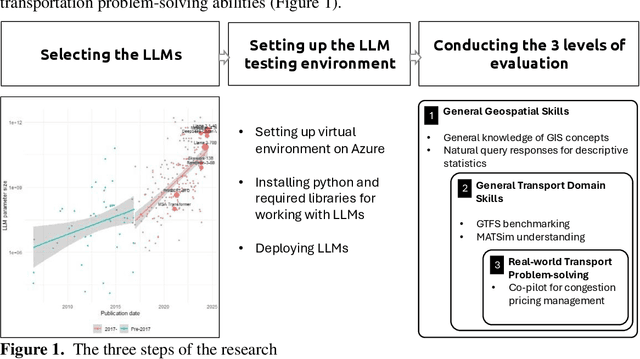

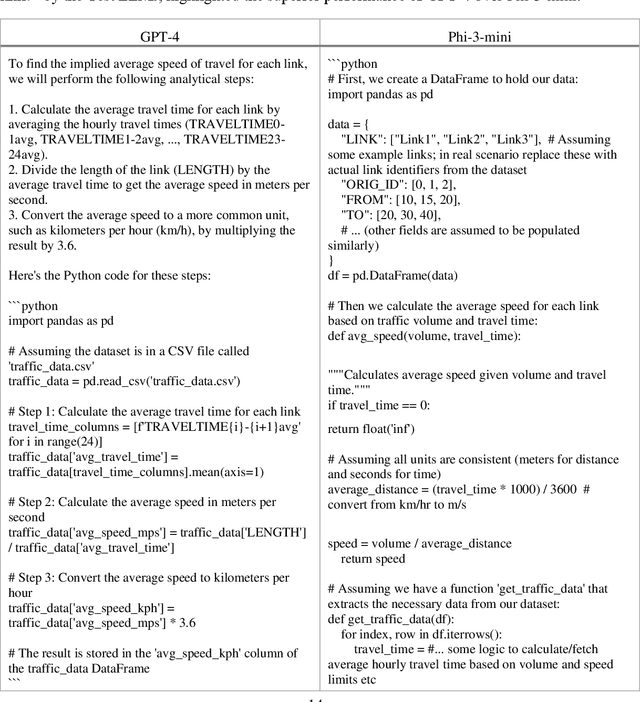
The resurgence and rapid advancement of Generative Artificial Intelligence (GenAI) in 2023 has catalyzed transformative shifts across numerous industry sectors, including urban transportation and logistics. This study investigates the evaluation of Large Language Models (LLMs), specifically GPT-4 and Phi-3-mini, to enhance transportation planning. The study assesses the performance and spatial comprehension of these models through a transportation-informed evaluation framework that includes general geospatial skills, general transportation domain skills, and real-world transportation problem-solving. Utilizing a mixed-methods approach, the research encompasses an evaluation of the LLMs' general Geographic Information System (GIS) skills, general transportation domain knowledge as well as abilities to support human decision-making in the real-world transportation planning scenarios of congestion pricing. Results indicate that GPT-4 demonstrates superior accuracy and reliability across various GIS and transportation-specific tasks compared to Phi-3-mini, highlighting its potential as a robust tool for transportation planners. Nonetheless, Phi-3-mini exhibits competence in specific analytical scenarios, suggesting its utility in resource-constrained environments. The findings underscore the transformative potential of GenAI technologies in urban transportation planning. Future work could explore the application of newer LLMs and the impact of Retrieval-Augmented Generation (RAG) techniques, on a broader set of real-world transportation planning and operations challenges, to deepen the integration of advanced AI models in transportation management practices.
Automated Floodwater Depth Estimation Using Large Multimodal Model for Rapid Flood Mapping
Feb 26, 2024



Information on the depth of floodwater is crucial for rapid mapping of areas affected by floods. However, previous approaches for estimating floodwater depth, including field surveys, remote sensing, and machine learning techniques, can be time-consuming and resource-intensive. This paper presents an automated and fast approach for estimating floodwater depth from on-site flood photos. A pre-trained large multimodal model, GPT-4 Vision, was used specifically for estimating floodwater. The input data were flooding photos that contained referenced objects, such as street signs, cars, people, and buildings. Using the heights of the common objects as references, the model returned the floodwater depth as the output. Results show that the proposed approach can rapidly provide a consistent and reliable estimation of floodwater depth from flood photos. Such rapid estimation is transformative in flood inundation mapping and assessing the severity of the flood in near-real time, which is essential for effective flood response strategies.
Autonomous GIS: the next-generation AI-powered GIS
May 20, 2023Large Language Models (LLMs), such as ChatGPT, demonstrate a strong understanding of human natural language and have been explored and applied in various fields, including reasoning, creative writing, code generation, translation, and information retrieval. By adopting LLM as the reasoning core, we introduce Autonomous GIS (AutoGIS) as an AI-powered geographic information system (GIS) that leverages the LLM's general abilities in natural language understanding, reasoning and coding for addressing spatial problems with automatic spatial data collection, analysis and visualization. We envision that autonomous GIS will need to achieve five autonomous goals including self-generating, self-organizing, self-verifying, self-executing, and self-growing. We developed a prototype system called LLM-Geo using the GPT-4 API in a Python environment, demonstrating what an autonomous GIS looks like and how it delivers expected results without human intervention using three case studies. For all case studies, LLM-Geo was able to return accurate results, including aggregated numbers, graphs, and maps, significantly reducing manual operation time. Although still in its infancy and lacking several important modules such as logging and code testing , LLM-Geo demonstrates a potential path towards next-generation AI-powered GIS. We advocate for the GIScience community to dedicate more effort to the research and development of autonomous GIS, making spatial analysis easier, faster, and more accessible to a broader audience.
An optimal sensors-based simulation method for spatiotemporal event detection
Aug 16, 2022


Human movements in urban areas are essential for understanding the human-environment interactions. However, activities and associated movements are full of uncertainties due to the complexity of a city. In this paper, we propose an optimal sensors-based simulation method for spatiotemporal event detection using human activity signals derived from taxi trip data. A sensor here is an abstract concept such that only the true observation data at the sensor location will be treated as known data for the simulation. Specifically, we first identify the optimal number of sensors and their locations that have the strongest correlation with the whole dataset. The observation data points from these sensors are then used to simulate a regular, uneventful scenario using the Discrete Empirical Interpolation Method. By comparing the simulated and observation scenarios, events are extracted both spatially and temporally. We apply this method in New York City with taxi trip records data. Results show that this method is effective in detecting when and where events occur.