 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Survey on Applications of Reinforcement Learning in Spatial Resource Allocation
Mar 07, 2024The challenge of spatial resource allocation is pervasive across various domains such as transportation, industry, and daily life. As the scale of real-world issues continues to expand and demands for real-time solutions increase, traditional algorithms face significant computational pressures, struggling to achieve optimal efficiency and real-time capabilities. In recent years, with the escalating computational power of computers, the remarkable achievements of reinforcement learning in domains like Go and robotics have demonstrated its robust learning and sequential decision-making capabilities. Given these advancements, there has been a surge in novel methods employing reinforcement learning to tackle spatial resource allocation problems. These methods exhibit advantages such as rapid solution convergence and strong model generalization abilities, offering a new perspective on resolving spatial resource allocation problems. Therefore, this paper aims to summarize and review recent theoretical methods and applied research utilizing reinforcement learning to address spatial resource allocation problems. It provides a summary and comprehensive overview of its fundamental principles, related methodologies, and applied research. Additionally, it highlights several unresolved issues that urgently require attention in this direction for the future.
Simulating multi-exit evacuation using deep reinforcement learning
Jul 11, 2020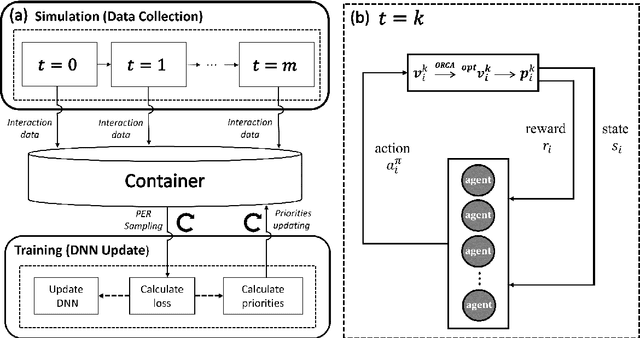
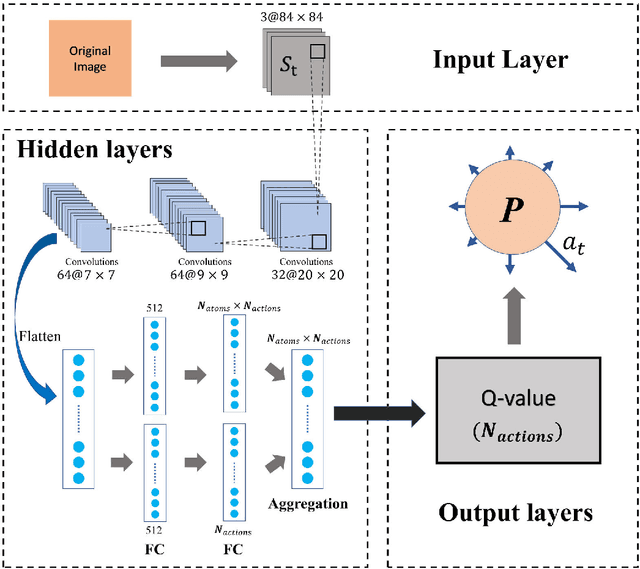
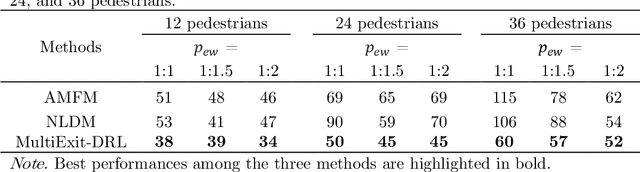
Conventional simulations on multi-exit indoor evacuation focus primarily on how to determine a reasonable exit based on numerous factors in a changing environment. Results commonly include some congested and other under-utilized exits, especially with massive pedestrians. We propose a multi-exit evacuation simulation based on Deep Reinforcement Learning (DRL), referred to as the MultiExit-DRL, which involves in a Deep Neural Network (DNN) framework to facilitate state-to-action mapping. The DNN framework applies Rainbow Deep Q-Network (DQN), a DRL algorithm that integrates several advanced DQN methods, to improve data utilization and algorithm stability, and further divides the action space into eight isometric directions for possible pedestrian choices. We compare MultiExit-DRL with two conventional multi-exit evacuation simulation models in three separate scenarios: 1) varying pedestrian distribution ratios, 2) varying exit width ratios, and 3) varying open schedules for an exit. The results show that MultiExit-DRL presents great learning efficiency while reducing the total number of evacuation frames in all designed experiments. In addition, the integration of DRL allows pedestrians to explore other potential exits and helps determine optimal directions, leading to the high efficiency of exit utilization.