 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImplicit Drifting Policy: One-Step Action Generation via Conditional Expert Geometry
May 31, 2026Generative action policies based on diffusion or flow matching excel in behavior cloning, yet their iterative sampling is prohibitive for high-frequency robot control. While recent one-step formulations alleviate this latency, they inevitably discard the intermediate trajectory evolution that provides crucial action correction. Directly recovering this mechanism by explicitly estimating a training-time drifting field is mathematically ill-posed due to extreme conditional demonstration sparsity. We introduce Implicit Drifting Policy (IDP), a one-step imitation learning framework that brings the training-time correction of Drifting into policy learning without explicit vector field estimation. IDP extracts a conditional expert geometry from the local variation of observation-similar expert actions, and compares it against a global reference geometry to isolate condition-specific constraints. This local geometric structure adaptively weights a scalar potential objective. Combined with an expert-proximal terminal evaluation, IDP directly enforces manifold constraints on the one-step generator during training. Extensive evaluations across 2D, 3D, and real-world manipulation tasks show IDP effectively maintains adherence to valid action manifolds, improving upon explicit drifting methods and achieving competitive performance with strong one-step baselines.
From Noise to Intent: Anchoring Generative VLA Policies with Residual Bridges
Apr 23, 2026Bridging high-level semantic understanding with low-level physical control remains a persistent challenge in embodied intelligence, stemming from the fundamental spatiotemporal scale mismatch between cognition and action. Existing generative VLA policies typically adopt a "Generation-from-Noise" paradigm, which disregards this disparity, leading to representation inefficiency and weak condition alignment during optimization. In this work, we propose ResVLA, an architecture that shifts the paradigm to "Refinement-from-Intent." Recognizing that robotic motion naturally decomposes into global intent and local dynamics, ResVLA utilizes spectral analysis to decouple control into a deterministic low-frequency anchor and a stochastic high-frequency residual. By anchoring the generative process on the predicted intent, our model focuses strictly on refining local dynamics via a residual diffusion bridge. Extensive simulation experiments show that ResVLA achieves competitive performance, strong robustness to language and robot embodiment perturbations, and faster convergence than standard generative baselines. It also demonstrates strong performance in real-world robot experiments.
FastGrasp: Learning-based Whole-body Control method for Fast Dexterous Grasping with Mobile Manipulators
Apr 14, 2026Fast grasping is critical for mobile robots in logistics, manufacturing, and service applications. Existing methods face fundamental challenges in impact stabilization under high-speed motion, real-time whole-body coordination, and generalization across diverse objects and scenarios, limited by fixed bases, simple grippers, or slow tactile response capabilities. We propose \textbf{FastGrasp}, a learning-based framework that integrates grasp guidance, whole-body control, and tactile feedback for mobile fast grasping. Our two-stage reinforcement learning strategy first generates diverse grasp candidates via conditional variational autoencoder conditioned on object point clouds, then executes coordinated movements of mobile base, arm, and hand guided by optimal grasp selection. Tactile sensing enables real-time grasp adjustments to handle impact effects and object variations. Extensive experiments demonstrate superior grasping performance in both simulation and real-world scenarios, achieving robust manipulation across diverse object geometries through effective sim-to-real transfer.
Affordance-R1: Reinforcement Learning for Generalizable Affordance Reasoning in Multimodal Large Language Model
Aug 08, 2025Affordance grounding focuses on predicting the specific regions of objects that are associated with the actions to be performed by robots. It plays a vital role in the fields of human-robot interaction, human-object interaction, embodied manipulation, and embodied perception. Existing models often neglect the affordance shared among different objects because they lack the Chain-of-Thought(CoT) reasoning abilities, limiting their out-of-domain (OOD) generalization and explicit reasoning capabilities. To address these challenges, we propose Affordance-R1, the first unified affordance grounding framework that integrates cognitive CoT guided Group Relative Policy Optimization (GRPO) within a reinforcement learning paradigm. Specifically, we designed a sophisticated affordance function, which contains format, perception, and cognition rewards to effectively guide optimization directions. Furthermore, we constructed a high-quality affordance-centric reasoning dataset, ReasonAff, to support training. Trained exclusively via reinforcement learning with GRPO and without explicit reasoning data, Affordance-R1 achieves robust zero-shot generalization and exhibits emergent test-time reasoning capabilities. Comprehensive experiments demonstrate that our model outperforms well-established methods and exhibits open-world generalization. To the best of our knowledge, Affordance-R1 is the first to integrate GRPO-based RL with reasoning into affordance reasoning. The code of our method and our dataset is released on https://github.com/hq-King/Affordance-R1.
HUMOF: Human Motion Forecasting in Interactive Social Scenes
Jun 05, 2025Complex scenes present significant challenges for predicting human behaviour due to the abundance of interaction information, such as human-human and humanenvironment interactions. These factors complicate the analysis and understanding of human behaviour, thereby increasing the uncertainty in forecasting human motions. Existing motion prediction methods thus struggle in these complex scenarios. In this paper, we propose an effective method for human motion forecasting in interactive scenes. To achieve a comprehensive representation of interactions, we design a hierarchical interaction feature representation so that high-level features capture the overall context of the interactions, while low-level features focus on fine-grained details. Besides, we propose a coarse-to-fine interaction reasoning module that leverages both spatial and frequency perspectives to efficiently utilize hierarchical features, thereby enhancing the accuracy of motion predictions. Our method achieves state-of-the-art performance across four public datasets. Code will be released when this paper is published.
EvolvingGrasp: Evolutionary Grasp Generation via Efficient Preference Alignment
Mar 19, 2025



Dexterous robotic hands often struggle to generalize effectively in complex environments due to the limitations of models trained on low-diversity data. However, the real world presents an inherently unbounded range of scenarios, making it impractical to account for every possible variation. A natural solution is to enable robots learning from experience in complex environments, an approach akin to evolution, where systems improve through continuous feedback, learning from both failures and successes, and iterating toward optimal performance. Motivated by this, we propose EvolvingGrasp, an evolutionary grasp generation method that continuously enhances grasping performance through efficient preference alignment. Specifically, we introduce Handpose wise Preference Optimization (HPO), which allows the model to continuously align with preferences from both positive and negative feedback while progressively refining its grasping strategies. To further enhance efficiency and reliability during online adjustments, we incorporate a Physics-aware Consistency Model within HPO, which accelerates inference, reduces the number of timesteps needed for preference finetuning, and ensures physical plausibility throughout the process. Extensive experiments across four benchmark datasets demonstrate state of the art performance of our method in grasp success rate and sampling efficiency. Our results validate that EvolvingGrasp enables evolutionary grasp generation, ensuring robust, physically feasible, and preference-aligned grasping in both simulation and real scenarios.
UniDemoiré: Towards Universal Image Demoiréing with Data Generation and Synthesis
Feb 10, 2025Image demoir\'eing poses one of the most formidable challenges in image restoration, primarily due to the unpredictable and anisotropic nature of moir\'e patterns. Limited by the quantity and diversity of training data, current methods tend to overfit to a single moir\'e domain, resulting in performance degradation for new domains and restricting their robustness in real-world applications. In this paper, we propose a universal image demoir\'eing solution, UniDemoir\'e, which has superior generalization capability. Notably, we propose innovative and effective data generation and synthesis methods that can automatically provide vast high-quality moir\'e images to train a universal demoir\'eing model. Our extensive experiments demonstrate the cutting-edge performance and broad potential of our approach for generalized image demoir\'eing.
EasyHOI: Unleashing the Power of Large Models for Reconstructing Hand-Object Interactions in the Wild
Nov 21, 2024
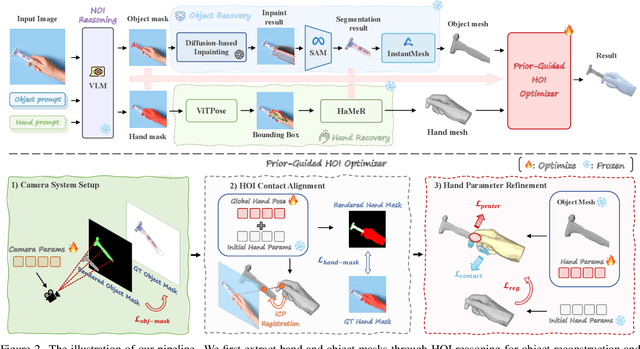
Our work aims to reconstruct hand-object interactions from a single-view image, which is a fundamental but ill-posed task. Unlike methods that reconstruct from videos, multi-view images, or predefined 3D templates, single-view reconstruction faces significant challenges due to inherent ambiguities and occlusions. These challenges are further amplified by the diverse nature of hand poses and the vast variety of object shapes and sizes. Our key insight is that current foundational models for segmentation, inpainting, and 3D reconstruction robustly generalize to in-the-wild images, which could provide strong visual and geometric priors for reconstructing hand-object interactions. Specifically, given a single image, we first design a novel pipeline to estimate the underlying hand pose and object shape using off-the-shelf large models. Furthermore, with the initial reconstruction, we employ a prior-guided optimization scheme, which optimizes hand pose to comply with 3D physical constraints and the 2D input image content. We perform experiments across several datasets and show that our method consistently outperforms baselines and faithfully reconstructs a diverse set of hand-object interactions. Here is the link of our project page: https://lym29.github.io/EasyHOI-page/