 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUniBioTransfer: A Unified Framework for Multiple Biometrics Transfer
Mar 20, 2026Deepface generation has traditionally followed a task-driven paradigm, where distinct tasks (e.g., face transfer and hair transfer) are addressed by task-specific models. Nevertheless, this single-task setting severely limits model generalization and scalability. A unified model capable of solving multiple deepface generation tasks in a single pass represents a promising and practical direction, yet remains challenging due to data scarcity and cross-task conflicts arising from heterogeneous attribute transformations. To this end, we propose UniBioTransfer, the first unified framework capable of handling both conventional deepface tasks (e.g., face transfer and face reenactment) and shape-varying transformations (e.g., hair transfer and head transfer). Besides, UniBioTransfer naturally generalizes to unseen tasks, like lip, eye, and glasses transfer, with minimal fine-tuning. Generally, UniBioTransfer addresses data insufficiency in multi-task generation through a unified data construction strategy, including a swapping-based corruption mechanism designed for spatially dynamic attributes like hair. It further mitigates cross-task interference via an innovative BioMoE, a mixture-of-experts based model coupled with a novel two-stage training strategy that effectively disentangles task-specific knowledge. Extensive experiments demonstrate the effectiveness, generalization, and scalability of UniBioTransfer, outperforming both existing unified models and task-specific methods across a wide range of deepface generation tasks. Project page is at https://scy639.github.io/UniBioTransfer.github.io/
HUMOF: Human Motion Forecasting in Interactive Social Scenes
Jun 05, 2025Complex scenes present significant challenges for predicting human behaviour due to the abundance of interaction information, such as human-human and humanenvironment interactions. These factors complicate the analysis and understanding of human behaviour, thereby increasing the uncertainty in forecasting human motions. Existing motion prediction methods thus struggle in these complex scenarios. In this paper, we propose an effective method for human motion forecasting in interactive scenes. To achieve a comprehensive representation of interactions, we design a hierarchical interaction feature representation so that high-level features capture the overall context of the interactions, while low-level features focus on fine-grained details. Besides, we propose a coarse-to-fine interaction reasoning module that leverages both spatial and frequency perspectives to efficiently utilize hierarchical features, thereby enhancing the accuracy of motion predictions. Our method achieves state-of-the-art performance across four public datasets. Code will be released when this paper is published.
Expanding-and-Shrinking Binary Neural Networks
Mar 31, 2025While binary neural networks (BNNs) offer significant benefits in terms of speed, memory and energy, they encounter substantial accuracy degradation in challenging tasks compared to their real-valued counterparts. Due to the binarization of weights and activations, the possible values of each entry in the feature maps generated by BNNs are strongly constrained. To tackle this limitation, we propose the expanding-and-shrinking operation, which enhances binary feature maps with negligible increase of computation complexity, thereby strengthening the representation capacity. Extensive experiments conducted on multiple benchmarks reveal that our approach generalizes well across diverse applications ranging from image classification, object detection to generative diffusion model, while also achieving remarkable improvement over various leading binarization algorithms based on different architectures including both CNNs and Transformers.
Generalizable Single-view Object Pose Estimation by Two-side Generating and Matching
Nov 24, 2024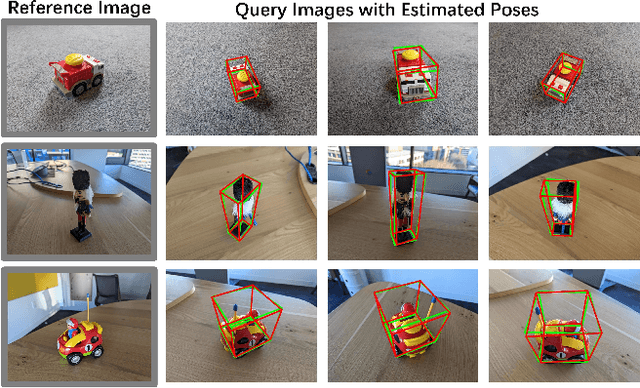
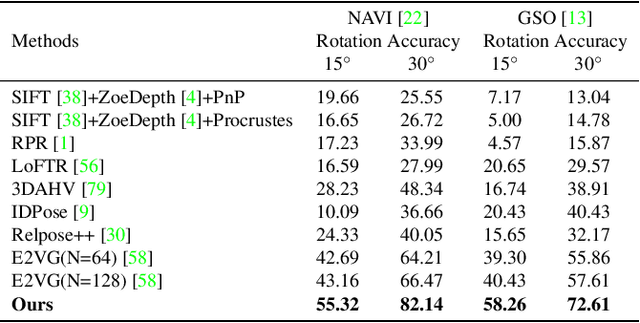
In this paper, we present a novel generalizable object pose estimation method to determine the object pose using only one RGB image. Unlike traditional approaches that rely on instance-level object pose estimation and necessitate extensive training data, our method offers generalization to unseen objects without extensive training, operates with a single reference image of the object, and eliminates the need for 3D object models or multiple views of the object. These characteristics are achieved by utilizing a diffusion model to generate novel-view images and conducting a two-sided matching on these generated images. Quantitative experiments demonstrate the superiority of our method over existing pose estimation techniques across both synthetic and real-world datasets. Remarkably, our approach maintains strong performance even in scenarios with significant viewpoint changes, highlighting its robustness and versatility in challenging conditions. The code will be re leased at https://github.com/scy639/Gen2SM.
Extreme Two-View Geometry From Object Poses with Diffusion Models
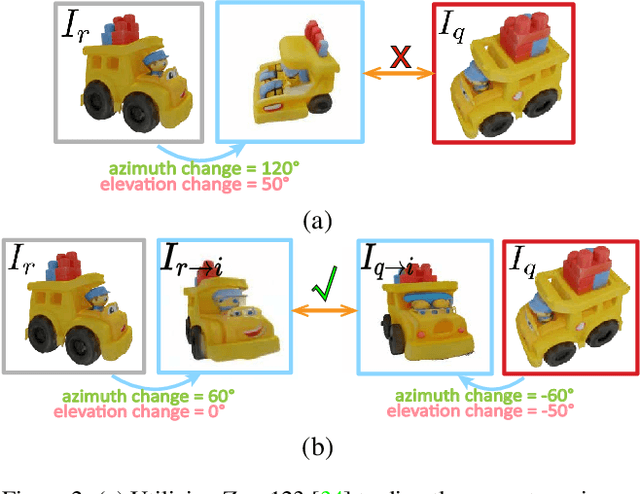
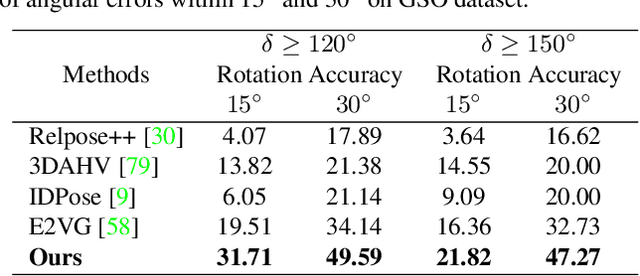
Feb 05, 2024Human has an incredible ability to effortlessly perceive the viewpoint difference between two images containing the same object, even when the viewpoint change is astonishingly vast with no co-visible regions in the images. This remarkable skill, however, has proven to be a challenge for existing camera pose estimation methods, which often fail when faced with large viewpoint differences due to the lack of overlapping local features for matching. In this paper, we aim to effectively harness the power of object priors to accurately determine two-view geometry in the face of extreme viewpoint changes. In our method, we first mathematically transform the relative camera pose estimation problem to an object pose estimation problem. Then, to estimate the object pose, we utilize the object priors learned from a diffusion model Zero123 to synthesize novel-view images of the object. The novel-view images are matched to determine the object pose and thus the two-view camera pose. In experiments, our method has demonstrated extraordinary robustness and resilience to large viewpoint changes, consistently estimating two-view poses with exceptional generalization ability across both synthetic and real-world datasets. Code will be available at https://github.com/scy639/Extreme-Two-View-Geometry-From-Object-Poses-with-Diffusion-Models.