 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAffordance-R1: Reinforcement Learning for Generalizable Affordance Reasoning in Multimodal Large Language Model
Aug 08, 2025Affordance grounding focuses on predicting the specific regions of objects that are associated with the actions to be performed by robots. It plays a vital role in the fields of human-robot interaction, human-object interaction, embodied manipulation, and embodied perception. Existing models often neglect the affordance shared among different objects because they lack the Chain-of-Thought(CoT) reasoning abilities, limiting their out-of-domain (OOD) generalization and explicit reasoning capabilities. To address these challenges, we propose Affordance-R1, the first unified affordance grounding framework that integrates cognitive CoT guided Group Relative Policy Optimization (GRPO) within a reinforcement learning paradigm. Specifically, we designed a sophisticated affordance function, which contains format, perception, and cognition rewards to effectively guide optimization directions. Furthermore, we constructed a high-quality affordance-centric reasoning dataset, ReasonAff, to support training. Trained exclusively via reinforcement learning with GRPO and without explicit reasoning data, Affordance-R1 achieves robust zero-shot generalization and exhibits emergent test-time reasoning capabilities. Comprehensive experiments demonstrate that our model outperforms well-established methods and exhibits open-world generalization. To the best of our knowledge, Affordance-R1 is the first to integrate GRPO-based RL with reasoning into affordance reasoning. The code of our method and our dataset is released on https://github.com/hq-King/Affordance-R1.
AvatarMakeup: Realistic Makeup Transfer for 3D Animatable Head Avatars
Jul 03, 2025Similar to facial beautification in real life, 3D virtual avatars require personalized customization to enhance their visual appeal, yet this area remains insufficiently explored. Although current 3D Gaussian editing methods can be adapted for facial makeup purposes, these methods fail to meet the fundamental requirements for achieving realistic makeup effects: 1) ensuring a consistent appearance during drivable expressions, 2) preserving the identity throughout the makeup process, and 3) enabling precise control over fine details. To address these, we propose a specialized 3D makeup method named AvatarMakeup, leveraging a pretrained diffusion model to transfer makeup patterns from a single reference photo of any individual. We adopt a coarse-to-fine idea to first maintain the consistent appearance and identity, and then to refine the details. In particular, the diffusion model is employed to generate makeup images as supervision. Due to the uncertainties in diffusion process, the generated images are inconsistent across different viewpoints and expressions. Therefore, we propose a Coherent Duplication method to coarsely apply makeup to the target while ensuring consistency across dynamic and multiview effects. Coherent Duplication optimizes a global UV map by recoding the averaged facial attributes among the generated makeup images. By querying the global UV map, it easily synthesizes coherent makeup guidance from arbitrary views and expressions to optimize the target avatar. Given the coarse makeup avatar, we further enhance the makeup by incorporating a Refinement Module into the diffusion model to achieve high makeup quality. Experiments demonstrate that AvatarMakeup achieves state-of-the-art makeup transfer quality and consistency throughout animation.
EvolvingGrasp: Evolutionary Grasp Generation via Efficient Preference Alignment
Mar 19, 2025



Dexterous robotic hands often struggle to generalize effectively in complex environments due to the limitations of models trained on low-diversity data. However, the real world presents an inherently unbounded range of scenarios, making it impractical to account for every possible variation. A natural solution is to enable robots learning from experience in complex environments, an approach akin to evolution, where systems improve through continuous feedback, learning from both failures and successes, and iterating toward optimal performance. Motivated by this, we propose EvolvingGrasp, an evolutionary grasp generation method that continuously enhances grasping performance through efficient preference alignment. Specifically, we introduce Handpose wise Preference Optimization (HPO), which allows the model to continuously align with preferences from both positive and negative feedback while progressively refining its grasping strategies. To further enhance efficiency and reliability during online adjustments, we incorporate a Physics-aware Consistency Model within HPO, which accelerates inference, reduces the number of timesteps needed for preference finetuning, and ensures physical plausibility throughout the process. Extensive experiments across four benchmark datasets demonstrate state of the art performance of our method in grasp success rate and sampling efficiency. Our results validate that EvolvingGrasp enables evolutionary grasp generation, ensuring robust, physically feasible, and preference-aligned grasping in both simulation and real scenarios.
DexGrasp Anything: Towards Universal Robotic Dexterous Grasping with Physics Awareness
Mar 11, 2025



A dexterous hand capable of grasping any object is essential for the development of general-purpose embodied intelligent robots. However, due to the high degree of freedom in dexterous hands and the vast diversity of objects, generating high-quality, usable grasping poses in a robust manner is a significant challenge. In this paper, we introduce DexGrasp Anything, a method that effectively integrates physical constraints into both the training and sampling phases of a diffusion-based generative model, achieving state-of-the-art performance across nearly all open datasets. Additionally, we present a new dexterous grasping dataset containing over 3.4 million diverse grasping poses for more than 15k different objects, demonstrating its potential to advance universal dexterous grasping. The code of our method and our dataset will be publicly released soon.
Optimal starting point for time series forecasting
Sep 25, 2024



Recent advances on time series forecasting mainly focus on improving the forecasting models themselves. However, managing the length of the input data can also significantly enhance prediction performance. In this paper, we introduce a novel approach called Optimal Starting Point Time Series Forecast (OSP-TSP) to capture the intrinsic characteristics of time series data. By adjusting the sequence length via leveraging the XGBoost and LightGBM models, the proposed approach can determine optimal starting point (OSP) of the time series and thus enhance the prediction performances. The performances of the OSP-TSP approach are then evaluated across various frequencies on the M4 dataset and other real-world datasets. Empirical results indicate that predictions based on the OSP-TSP approach consistently outperform those using the complete dataset. Moreover, recognizing the necessity of sufficient data to effectively train models for OSP identification, we further propose targeted solutions to address the issue of data insufficiency.
DreamLCM: Towards High-Quality Text-to-3D Generation via Latent Consistency Model
Aug 06, 2024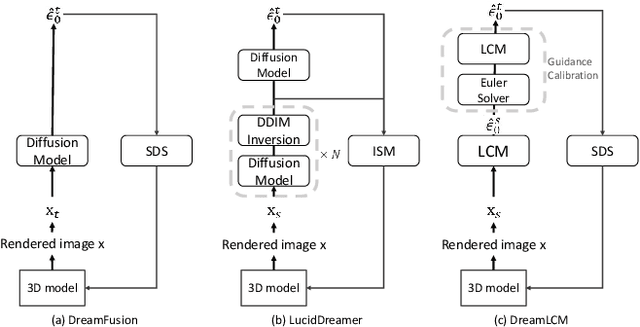
Recently, the text-to-3D task has developed rapidly due to the appearance of the SDS method. However, the SDS method always generates 3D objects with poor quality due to the over-smooth issue. This issue is attributed to two factors: 1) the DDPM single-step inference produces poor guidance gradients; 2) the randomness from the input noises and timesteps averages the details of the 3D contents.In this paper, to address the issue, we propose DreamLCM which incorporates the Latent Consistency Model (LCM). DreamLCM leverages the powerful image generation capabilities inherent in LCM, enabling generating consistent and high-quality guidance, i.e., predicted noises or images. Powered by the improved guidance, the proposed method can provide accurate and detailed gradients to optimize the target 3D models.In addition, we propose two strategies to enhance the generation quality further. Firstly, we propose a guidance calibration strategy, utilizing Euler Solver to calibrate the guidance distribution to accelerate 3D models to converge. Secondly, we propose a dual timestep strategy, increasing the consistency of guidance and optimizing 3D models from geometry to appearance in DreamLCM. Experiments show that DreamLCM achieves state-of-the-art results in both generation quality and training efficiency. The code is available at https://github.com/1YimingZhong/DreamLCM.