 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePrompt Tuning as User Inherent Profile Inference Machine
Aug 13, 2024



Large Language Models (LLMs) have exhibited significant promise in recommender systems by empowering user profiles with their extensive world knowledge and superior reasoning capabilities. However, LLMs face challenges like unstable instruction compliance, modality gaps, and high inference latency, leading to textual noise and limiting their effectiveness in recommender systems. To address these challenges, we propose UserIP-Tuning, which uses prompt-tuning to infer user profiles. It integrates the causal relationship between user profiles and behavior sequences into LLMs' prompts. And employs expectation maximization to infer the embedded latent profile, minimizing textual noise by fixing the prompt template. Furthermore, A profile quantization codebook bridges the modality gap by categorizing profile embeddings into collaborative IDs, which are pre-stored for online deployment. This improves time efficiency and reduces memory usage. Experiments on four public datasets show that UserIP-Tuning outperforms state-of-the-art recommendation algorithms. Additional tests and case studies confirm its effectiveness, robustness, and transferability.
OS-FPI: A Coarse-to-Fine One-Stream Network for UAV Geo-Localization
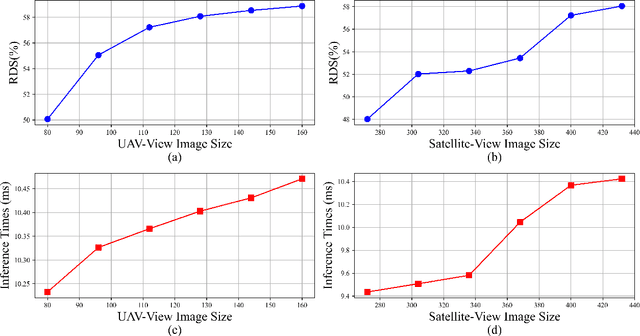
Mar 10, 2024The geo-localization and navigation technology of unmanned aerial vehicles (UAVs) in denied environments is currently a prominent research area. Prior approaches mainly employed a two-stream network with non-shared weights to extract features from UAV and satellite images separately, followed by related modeling to obtain the response map. However, the two-stream network extracts UAV and satellite features independently. This approach significantly affects the efficiency of feature extraction and increases the computational load. To address these issues, we propose a novel coarse-to-fine one-stream network (OS-FPI). Our approach allows information exchange between UAV and satellite features during early image feature extraction. To improve the model's performance, the framework retains feature maps generated at different stages of the feature extraction process for the feature fusion network, and establishes additional connections between UAV and satellite feature maps in the feature fusion network. Additionally, the framework introduces offset prediction to further refine and optimize the model's prediction results based on the classification tasks. Our proposed model, boasts a similar inference speed to FPI while significantly reducing the number of parameters. It can achieve better performance with fewer parameters under the same conditions. Moreover, it achieves state-of-the-art performance on the UL14 dataset. Compared to previous models, our model achieved a significant 10.92-point improvement on the RDS metric, reaching 76.25. Furthermore, its performance in meter-level localization accuracy is impressive, with 182.62% improvement in 3-meter accuracy, 164.17% improvement in 5-meter accuracy, and 137.43% improvement in 10-meter accuracy.
Finding Point with Image: An End-to-End Benchmark for Vision-based UAV Localization
Aug 13, 2022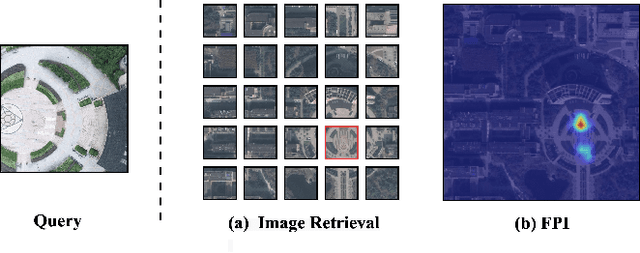
In the past, image retrieval was the mainstream solution for cross-view geolocation and UAV visual localization tasks. In a nutshell, the way of image retrieval is to obtain the final required information, such as GPS, through a transitional perspective. However, the way of image retrieval is not completely end-to-end. And there are some redundant operations such as the need to prepare the feature library in advance, and the sampling interval problem of the gallery construction, which make it difficult to implement large-scale applications. In this article we propose an end-to-end positioning scheme, Finding Point with Image (FPI), which aims to directly find the corresponding location in the image of source B (satellite-view) through the image of source A (drone-view). To verify the feasibility of our framework, we construct a new dataset (UL14), which is designed to solve the UAV visual self-localization task. At the same time, we also build a transformer-based baseline to achieve end-to-end training. In addition, the previous evaluation methods are no longer applicable under the framework of FPI. Thus, Metre-level Accuracy (MA) and Relative Distance Score (RDS) are proposed to evaluate the accuracy of UAV localization. At the same time, we preliminarily compare FPI and image retrieval method, and the structure of FPI achieves better performance in both speed and efficiency. In particular, the task of FPI remains great challenges due to the large differences between different views and the drastic spatial scale transformation.
Representation Evaluation Block-based Teacher-Student Network for the Industrial Quality-relevant Performance Modeling and Monitoring
Jan 20, 2021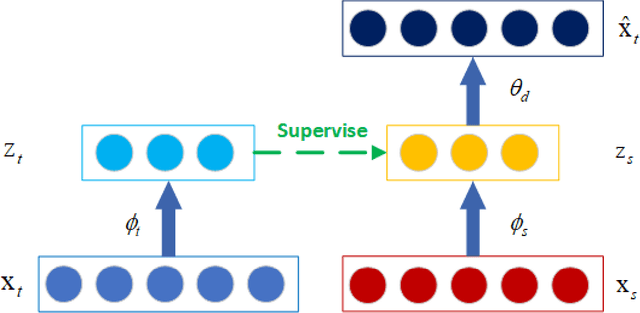
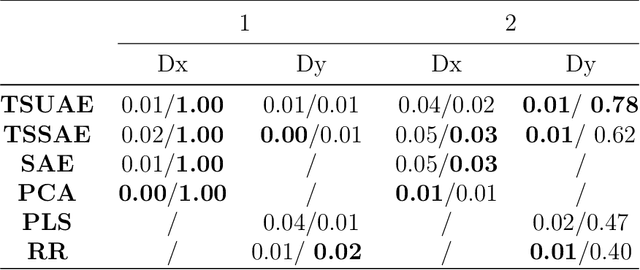
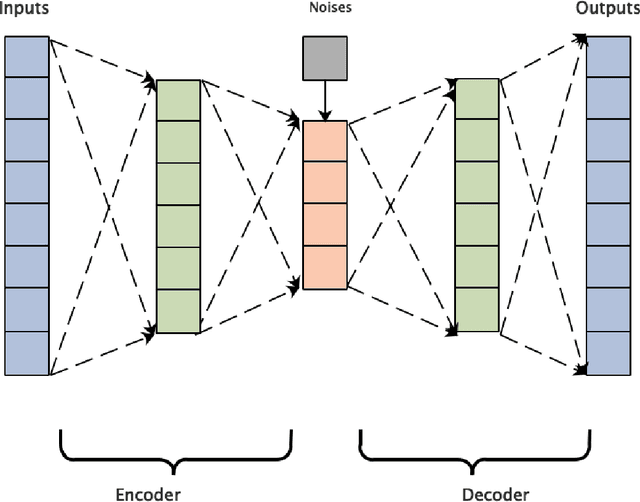

Quality-relevant fault detection plays an important role in industrial processes, while the current quality-related fault detection methods based on neural networks main concentrate on process-relevant variables and ignore quality-relevant variables, which restrict the application of process monitoring. Therefore, in this paper, a fault detection scheme based on the improved teacher-student network is proposed for quality-relevant fault detection. In the traditional teacher-student network, as the features differences between the teacher network and the student network will cause performance degradation on the student network, representation evaluation block (REB) is proposed to quantify the features differences between the teacher and the student networks, and uncertainty modeling is used to add this difference in modeling process, which are beneficial to reduce the features differences and improve the performance of the student network. Accordingly, REB and uncertainty modeling is applied in the teacher-student network named as uncertainty modeling teacher-student uncertainty autoencoder (TSUAE). Then, the proposed TSUAE is applied to process monitoring, which can effectively detect faults in the process-relevant subspace and quality-relevant subspace simultaneously. The proposed TSUAE-based fault detection method is verified in two simulation experiments illustrating that it has satisfactory fault detection performance compared to other fault detection methods.