 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFinding Point with Image: An End-to-End Benchmark for Vision-based UAV Localization
Paper and Code
Aug 13, 2022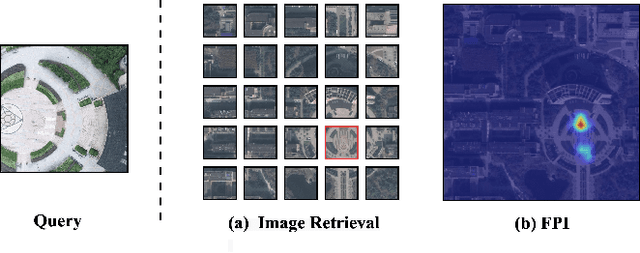
In the past, image retrieval was the mainstream solution for cross-view geolocation and UAV visual localization tasks. In a nutshell, the way of image retrieval is to obtain the final required information, such as GPS, through a transitional perspective. However, the way of image retrieval is not completely end-to-end. And there are some redundant operations such as the need to prepare the feature library in advance, and the sampling interval problem of the gallery construction, which make it difficult to implement large-scale applications. In this article we propose an end-to-end positioning scheme, Finding Point with Image (FPI), which aims to directly find the corresponding location in the image of source B (satellite-view) through the image of source A (drone-view). To verify the feasibility of our framework, we construct a new dataset (UL14), which is designed to solve the UAV visual self-localization task. At the same time, we also build a transformer-based baseline to achieve end-to-end training. In addition, the previous evaluation methods are no longer applicable under the framework of FPI. Thus, Metre-level Accuracy (MA) and Relative Distance Score (RDS) are proposed to evaluate the accuracy of UAV localization. At the same time, we preliminarily compare FPI and image retrieval method, and the structure of FPI achieves better performance in both speed and efficiency. In particular, the task of FPI remains great challenges due to the large differences between different views and the drastic spatial scale transformation.