 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLongCat-Next: Lexicalizing Modalities as Discrete Tokens
Mar 29, 2026The prevailing Next-Token Prediction (NTP) paradigm has driven the success of large language models through discrete autoregressive modeling. However, contemporary multimodal systems remain language-centric, often treating non-linguistic modalities as external attachments, leading to fragmented architectures and suboptimal integration. To transcend this limitation, we introduce Discrete Native Autoregressive (DiNA), a unified framework that represents multimodal information within a shared discrete space, enabling a consistent and principled autoregressive modeling across modalities. A key innovation is the Discrete Native Any-resolution Visual Transformer (dNaViT), which performs tokenization and de-tokenization at arbitrary resolutions, transforming continuous visual signals into hierarchical discrete tokens. Building on this foundation, we develop LongCat-Next, a native multimodal model that processes text, vision, and audio under a single autoregressive objective with minimal modality-specific design. As an industrial-strength foundation model, it excels at seeing, painting, and talking within a single framework, achieving strong performance across a wide range of multimodal benchmarks. In particular, LongCat-Next addresses the long-standing performance ceiling of discrete vision modeling on understanding tasks and provides a unified approach to effectively reconcile the conflict between understanding and generation. As an attempt toward native multimodality, we open-source the LongCat-Next and its tokenizers, hoping to foster further research and development in the community. GitHub: https://github.com/meituan-longcat/LongCat-Next
HearSay Benchmark: Do Audio LLMs Leak What They Hear?
Jan 07, 2026While Audio Large Language Models (ALLMs) have achieved remarkable progress in understanding and generation, their potential privacy implications remain largely unexplored. This paper takes the first step to investigate whether ALLMs inadvertently leak user privacy solely through acoustic voiceprints and introduces $\textit{HearSay}$, a comprehensive benchmark constructed from over 22,000 real-world audio clips. To ensure data quality, the benchmark is meticulously curated through a rigorous pipeline involving automated profiling and human verification, guaranteeing that all privacy labels are grounded in factual records. Extensive experiments on $\textit{HearSay}$ yield three critical findings: $\textbf{Significant Privacy Leakage}$: ALLMs inherently extract private attributes from voiceprints, reaching 92.89% accuracy on gender and effectively profiling social attributes. $\textbf{Insufficient Safety Mechanisms}$: Alarmingly, existing safeguards are severely inadequate; most models fail to refuse privacy-intruding requests, exhibiting near-zero refusal rates for physiological traits. $\textbf{Reasoning Amplifies Risk}$: Chain-of-Thought (CoT) reasoning exacerbates privacy risks in capable models by uncovering deeper acoustic correlations. These findings expose critical vulnerabilities in ALLMs, underscoring the urgent need for targeted privacy alignment. The codes and dataset are available at https://github.com/JinWang79/HearSay_Benchmark
Auto-Formulating Dynamic Programming Problems with Large Language Models
Jul 15, 2025



Dynamic programming (DP) is a fundamental method in operations research, but formulating DP models has traditionally required expert knowledge of both the problem context and DP techniques. Large Language Models (LLMs) offer the potential to automate this process. However, DP problems pose unique challenges due to their inherently stochastic transitions and the limited availability of training data. These factors make it difficult to directly apply existing LLM-based models or frameworks developed for other optimization problems, such as linear or integer programming. We introduce DP-Bench, the first benchmark covering a wide range of textbook-level DP problems to enable systematic evaluation. We present Dynamic Programming Language Model (DPLM), a 7B-parameter specialized model that achieves performance comparable to state-of-the-art LLMs like OpenAI's o1 and DeepSeek-R1, and surpasses them on hard problems. Central to DPLM's effectiveness is DualReflect, our novel synthetic data generation pipeline, designed to scale up training data from a limited set of initial examples. DualReflect combines forward generation for diversity and backward generation for reliability. Our results reveal a key insight: backward generation is favored in low-data regimes for its strong correctness guarantees, while forward generation, though lacking such guarantees, becomes increasingly valuable at scale for introducing diverse formulations. This trade-off highlights the complementary strengths of both approaches and the importance of combining them.
Solver-Informed RL: Grounding Large Language Models for Authentic Optimization Modeling
May 17, 2025Optimization modeling is fundamental to decision-making across diverse domains.Despite progress in automating optimization formulation from natural language descriptions, Large Language Models (LLMs) often struggle to generate formally correct and usable models due to hallucinations, posing a challenge for reliable automation. Inspired by the success of Reinforcement Learning (RL) in enhancing Large Reasoning Models, we present Solver-Informed Reinforcement Learning (SIRL).This novel framework leverages external optimization solvers as verifiable reward mechanisms to significantly improve the authenticity of LLMs for optimization modeling.Acting as precise verifiers, these solvers automatically assess the executable code and the instance-level mathematical model represented by the associated LP file, yielding precise and comprehensive feedback signals -- including syntax, feasibility, and solution quality that directly inform the RL process. This automated verification process, powered by classic optimization solvers, also underpins our instance-enhanced self-consistency method to synthesize high-quality training data. Extensive experiments on diverse public benchmarks demonstrate that SIRL achieves state-of-the-art performance, substantially outperforming existing methods in generating accurate and executable optimization models.
LLM-Powered Ensemble Learning for Paper Source Tracing: A GPU-Free Approach
Sep 17, 2024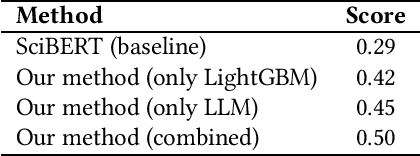
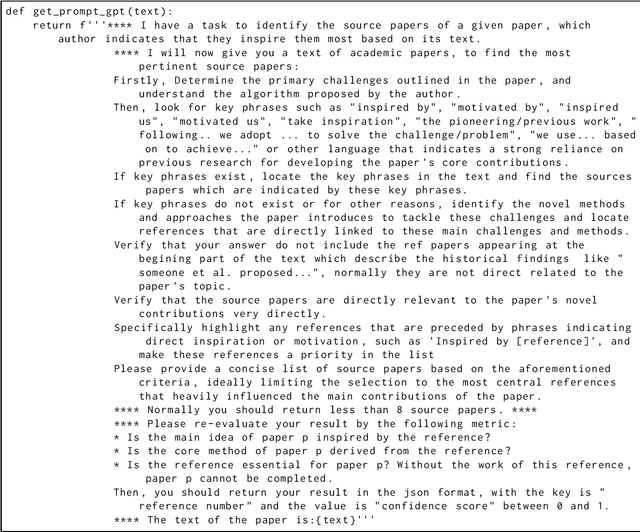
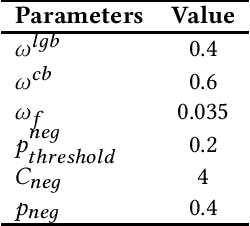
We participated in the KDD CUP 2024 paper source tracing competition and achieved the 3rd place. This competition tasked participants with identifying the reference sources (i.e., ref-sources, as referred to by the organizers of the competition) of given academic papers. Unlike most teams that addressed this challenge by fine-tuning pre-trained neural language models such as BERT or ChatGLM, our primary approach utilized closed-source large language models (LLMs). With recent advancements in LLM technology, closed-source LLMs have demonstrated the capability to tackle complex reasoning tasks in zero-shot or few-shot scenarios. Consequently, in the absence of GPUs, we employed closed-source LLMs to directly generate predicted reference sources from the provided papers. We further refined these predictions through ensemble learning. Notably, our method was the only one among the award-winning approaches that did not require the use of GPUs for model training. Code available at https://github.com/Cklwanfifa/KDDCUP2024-PST.
ScrollTimes: Tracing the Provenance of Paintings as a Window into History
Jun 15, 2023



Digital humanities research has flourished due to the diverse artifacts available in cultural heritage databases. However, over-reliance on a single artifact type can result in poor contextualization and a constrained understanding of historical context. We collaborated with art historians to examine handscrolls, a form of traditional Chinese painting which offers a wealth of data for historical analysis and provides a unique opportunity for understanding history through artwork. We propose ScrollTimes, a visual analysis system for tracing handscroll historic context by linking multiple data sources. Specifically, a unique layout is developed for efficiently viewing long handscrolls. Using image processing techniques and language models, we extract, verify, and supplement elements in handscrolls with different cultural heritage databases. Furthermore, interactive biographies are constructed for handscrolls to uncover their historical narratives, provenance trajectories, and artistic legacies. Validated through case studies and expert interviews, our approach offers a window into history, fostering a holistic understanding of handscroll provenance and historical significance.
Regret Analysis of Online LQR Control via Trajectory Prediction and Tracking: Extended Version
Feb 21, 2023In this paper, we propose and analyze a new method for online linear quadratic regulator (LQR) control with a priori unknown time-varying cost matrices. The cost matrices are revealed sequentially with the potential for future values to be previewed over a short window. Our novel method involves using the available cost matrices to predict the optimal trajectory, and a tracking controller to drive the system towards it. We adopted the notion of dynamic regret to measure the performance of this proposed online LQR control method, with our main result being that the (dynamic) regret of our method is upper bounded by a constant. Moreover, the regret upper bound decays exponentially with the preview window length, and is extendable to systems with disturbances. We show in simulations that our proposed method offers improved performance compared to other previously proposed online LQR methods.
GP-NAS-ensemble: a model for NAS Performance Prediction
Jan 23, 2023
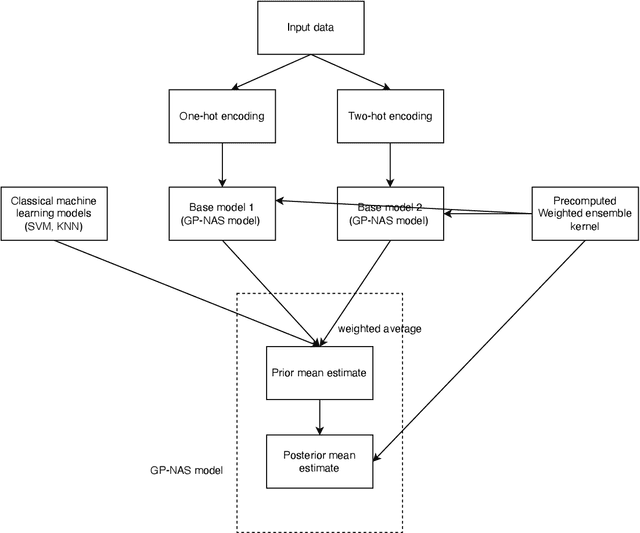
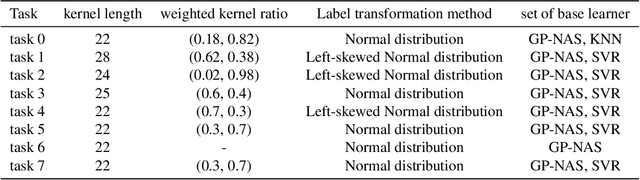
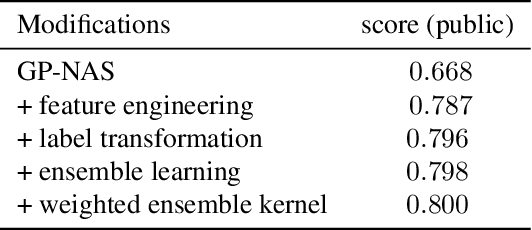
It is of great significance to estimate the performance of a given model architecture without training in the application of Neural Architecture Search (NAS) as it may take a lot of time to evaluate the performance of an architecture. In this paper, a novel NAS framework called GP-NAS-ensemble is proposed to predict the performance of a neural network architecture with a small training dataset. We make several improvements on the GP-NAS model to make it share the advantage of ensemble learning methods. Our method ranks second in the CVPR2022 second lightweight NAS challenge performance prediction track.
DQN Control Solution for KDD Cup 2021 City Brain Challenge
Aug 14, 2021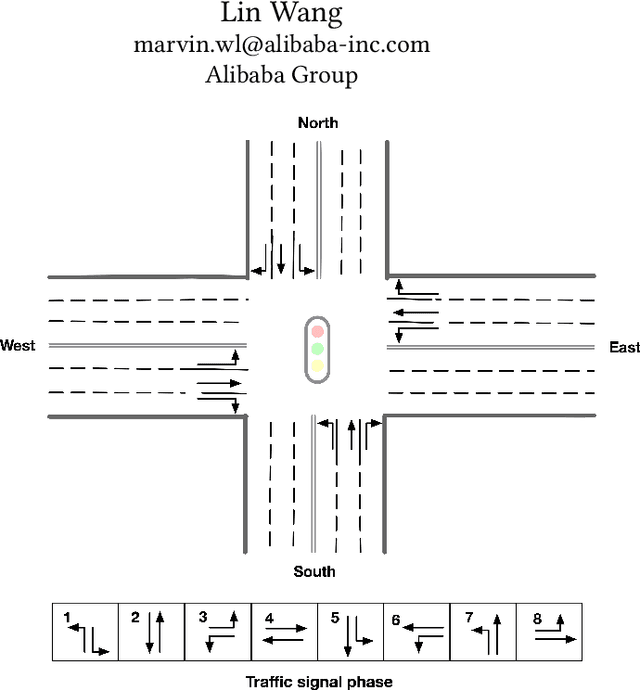
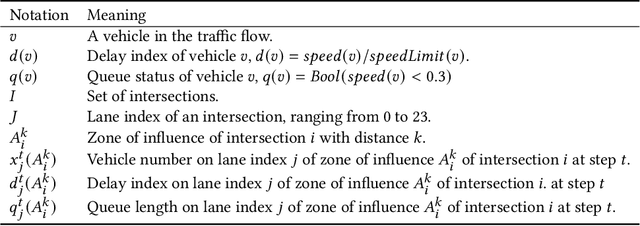
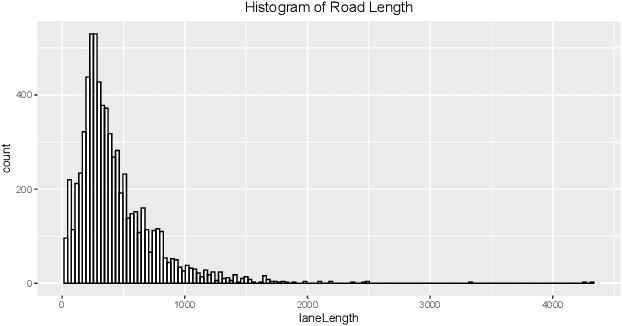
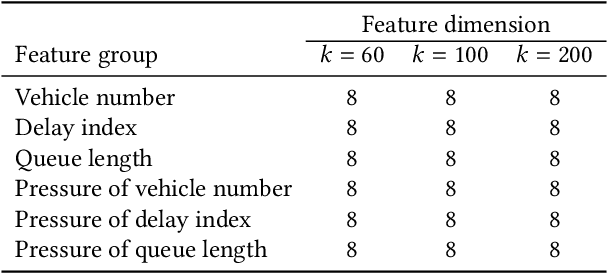
We took part in the city brain challenge competition and achieved the 8th place. In this competition, the players are provided with a real-world city-scale road network and its traffic demand derived from real traffic data. The players are asked to coordinate the traffic signals with a self-designed agent to maximize the number of vehicles served while maintaining an acceptable delay. In this abstract paper, we present an overall analysis and our detailed solution to this competition. Our approach is mainly based on the adaptation of the deep Q-network (DQN) for real-time traffic signal control. From our perspective, the major challenge of this competition is how to extend the classical DQN framework to traffic signals control in real-world complex road network and traffic flow situation. After trying and implementing several classical reward functions, we finally chose to apply our newly-designed reward in our agent. By applying our newly-proposed reward function and carefully tuning the control scheme, an agent based on a single DQN model can rank among the top 15 teams. We hope this paper could serve, to some extent, as a baseline solution to traffic signal control of real-world road network and inspire further attempts and researches.
Probabilistic Forecasting with Temporal Convolutional Neural Network
Jun 11, 2019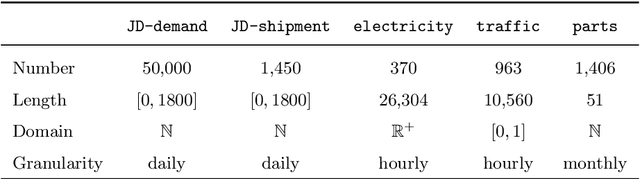
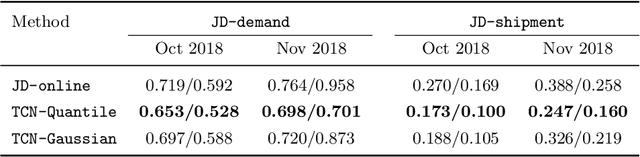
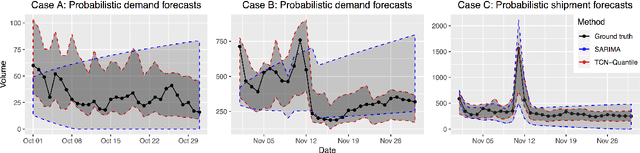
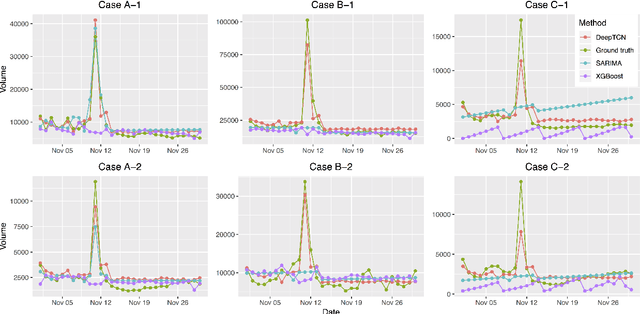
We present a probabilistic forecasting framework based on convolutional neural network for multiple related time series forecasting. The framework can be applied to estimate probability density under both parametric and non-parametric settings. More specifically, stacked residual blocks based on dilated causal convolutional nets are constructed to capture the temporal dependencies of the series. Combined with representation learning, our approach is able to learn complex patterns such as seasonality, holiday effects within and across series, and to leverage those patterns for more accurate forecasts, especially when historical data is sparse or unavailable. Extensive empirical studies are performed on several real-world datasets, including datasets from JD.com, China's largest online retailer. The results show that our framework outperforms other state-of-the-art methods in both accuracy and efficiency.