 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSolving the Offline and Online Min-Max Problem of Non-smooth Submodular-Concave Functions: A Zeroth-Order Approach
Jan 29, 2026We consider max-min and min-max problems with objective functions that are possibly non-smooth, submodular with respect to the minimiser and concave with respect to the maximiser. We investigate the performance of a zeroth-order method applied to this problem. The method is based on the subgradient of the Lovász extension of the objective function with respect to the minimiser and based on Gaussian smoothing to estimate the smoothed function gradient with respect to the maximiser. In expectation sense, we prove the convergence of the algorithm to an $ε$-saddle point in the offline case. Moreover, we show that, in the expectation sense, in the online setting, the algorithm achieves $O(\sqrt{N\bar{P}_N})$ online duality gap, where $N$ is the number of iterations and $\bar{P}_N$ is the path length of the sequence of optimal decisions. The complexity analysis and hyperparameter selection are presented for all the cases. The theoretical results are illustrated via numerical examples.
Grasping Trajectory Optimization with Point Clouds
Mar 08, 2024We introduce a new trajectory optimization method for robotic grasping based on a point-cloud representation of robots and task spaces. In our method, robots are represented by 3D points on their link surfaces. The task space of a robot is represented by a point cloud that can be obtained from depth sensors. Using the point-cloud representation, goal reaching in grasping can be formulated as point matching, while collision avoidance can be efficiently achieved by querying the signed distance values of the robot points in the signed distance field of the scene points. Consequently, a constrained non-linear optimization problem is formulated to solve the joint motion and grasp planning problem. The advantage of our method is that the point-cloud representation is general to be used with any robot in any environment. We demonstrate the effectiveness of our method by conducting experiments on a tabletop scene and a shelf scene for grasping with a Fetch mobile manipulator and a Franka Panda arm.
CLIPPER+: A Fast Maximal Clique Algorithm for Robust Global Registration
Feb 23, 2024



We present CLIPPER+, an algorithm for finding maximal cliques in unweighted graphs for outlier-robust global registration. The registration problem can be formulated as a graph and solved by finding its maximum clique. This formulation leads to extreme robustness to outliers; however, finding the maximum clique is an NP-hard problem, and therefore approximation is required in practice for large-size problems. The performance of an approximation algorithm is evaluated by its computational complexity (the lower the runtime, the better) and solution accuracy (how close the solution is to the maximum clique). Accordingly, the main contribution of CLIPPER+ is outperforming the state-of-the-art in accuracy while maintaining a relatively low runtime. CLIPPER+ builds on prior work (CLIPPER [1] and PMC [2]) and prunes the graph by removing vertices that have a small core number and cannot be a part of the maximum clique. This will result in a smaller graph, on which the maximum clique can be estimated considerably faster. We evaluate the performance of CLIPPER+ on standard graph benchmarks, as well as synthetic and real-world point cloud registration problems. These evaluations demonstrate that CLIPPER+ has the highest accuracy and can register point clouds in scenarios where over $99\%$ of associations are outliers. Our code and evaluation benchmarks are released at https://github.com/ariarobotics/clipperp.
Regret Analysis of Online LQR Control via Trajectory Prediction and Tracking: Extended Version
Feb 21, 2023In this paper, we propose and analyze a new method for online linear quadratic regulator (LQR) control with a priori unknown time-varying cost matrices. The cost matrices are revealed sequentially with the potential for future values to be previewed over a short window. Our novel method involves using the available cost matrices to predict the optimal trajectory, and a tracking controller to drive the system towards it. We adopted the notion of dynamic regret to measure the performance of this proposed online LQR control method, with our main result being that the (dynamic) regret of our method is upper bounded by a constant. Moreover, the regret upper bound decays exponentially with the preview window length, and is extendable to systems with disturbances. We show in simulations that our proposed method offers improved performance compared to other previously proposed online LQR methods.
Robust Data-Driven Output Feedback Control via Bootstrapped Multiplicative Noise
May 10, 2022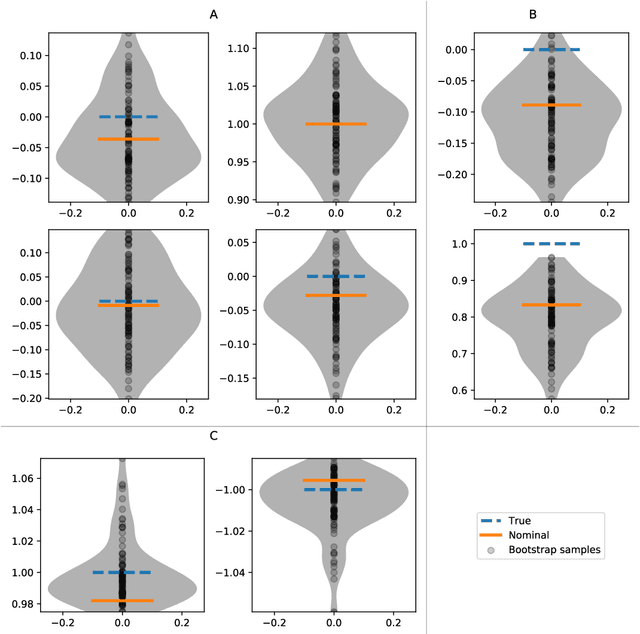


We propose a robust data-driven output feedback control algorithm that explicitly incorporates inherent finite-sample model estimate uncertainties into the control design. The algorithm has three components: (1) a subspace identification nominal model estimator; (2) a bootstrap resampling method that quantifies non-asymptotic variance of the nominal model estimate; and (3) a non-conventional robust control design method comprising a coupled optimal dynamic output feedback filter and controller with multiplicative noise. A key advantage of the proposed approach is that the system identification and robust control design procedures both use stochastic uncertainty representations, so that the actual inherent statistical estimation uncertainty directly aligns with the uncertainty the robust controller is being designed against. Moreover, the control design method accommodates a highly structured uncertainty representation that can capture uncertainty shape more effectively than existing approaches. We show through numerical experiments that the proposed robust data-driven output feedback controller can significantly outperform a certainty equivalent controller on various measures of sample complexity and stability robustness.
Probabilistic Data Association for Semantic SLAM at Scale
Feb 25, 2022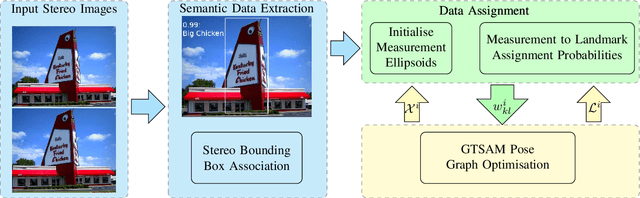
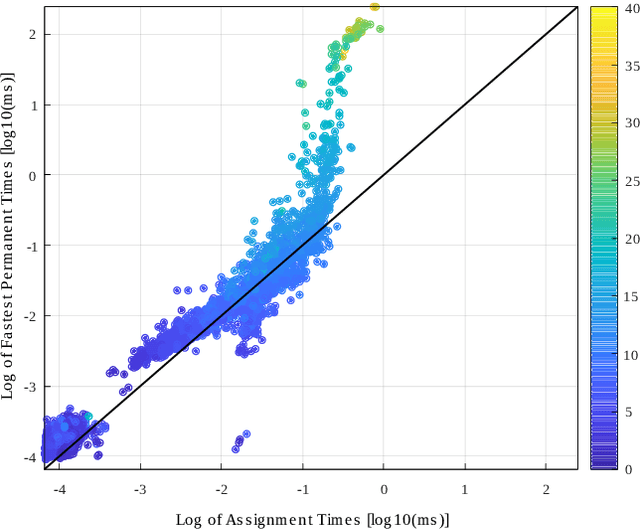
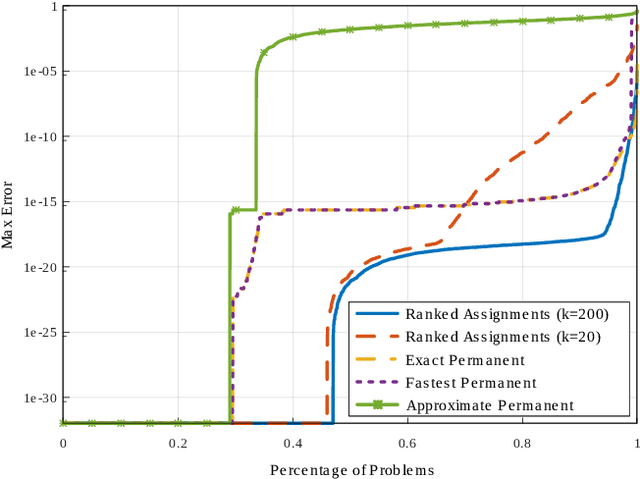
With advances in image processing and machine learning, it is now feasible to incorporate semantic information into the problem of simultaneous localisation and mapping (SLAM). Previously, SLAM was carried out using lower level geometric features (points, lines, and planes) which are often view-point dependent and error prone in visually repetitive environments. Semantic information can improve the ability to recognise previously visited locations, as well as maintain sparser maps for long term SLAM applications. However, SLAM in repetitive environments has the critical problem of assigning measurements to the landmarks which generated them. In this paper, we use k-best assignment enumeration to compute marginal assignment probabilities for each measurement landmark pair, in real time. We present numerical studies on the KITTI dataset to demonstrate the effectiveness and speed of the proposed framework.
PAGE-PG: A Simple and Loopless Variance-Reduced Policy Gradient Method with Probabilistic Gradient Estimation
Feb 01, 2022

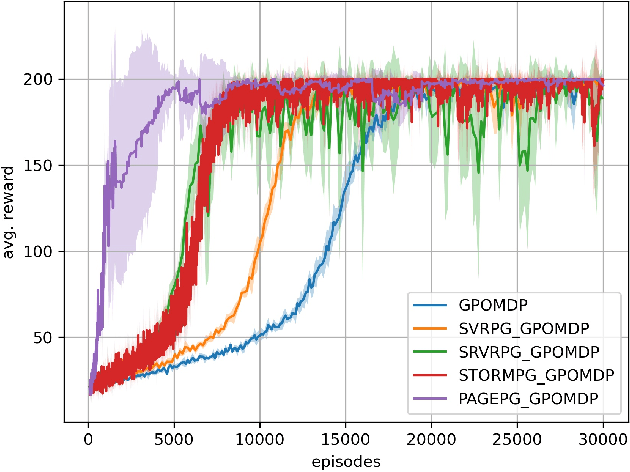
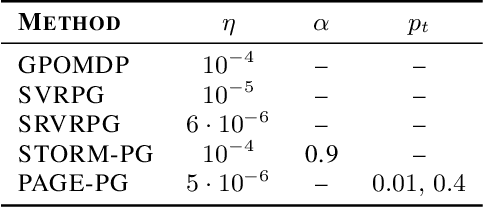
Despite their success, policy gradient methods suffer from high variance of the gradient estimate, which can result in unsatisfactory sample complexity. Recently, numerous variance-reduced extensions of policy gradient methods with provably better sample complexity and competitive numerical performance have been proposed. After a compact survey on some of the main variance-reduced REINFORCE-type methods, we propose ProbAbilistic Gradient Estimation for Policy Gradient (PAGE-PG), a novel loopless variance-reduced policy gradient method based on a probabilistic switch between two types of updates. Our method is inspired by the PAGE estimator for supervised learning and leverages importance sampling to obtain an unbiased gradient estimator. We show that PAGE-PG enjoys a $\mathcal{O}\left( \epsilon^{-3} \right)$ average sample complexity to reach an $\epsilon$-stationary solution, which matches the sample complexity of its most competitive counterparts under the same setting. A numerical evaluation confirms the competitive performance of our method on classical control tasks.
Centralized Collision-free Polynomial Trajectories and Goal Assignment for Aerial Swarms
Jan 21, 2021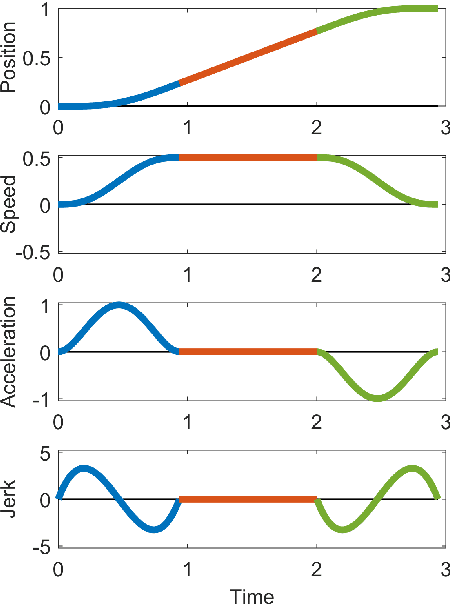
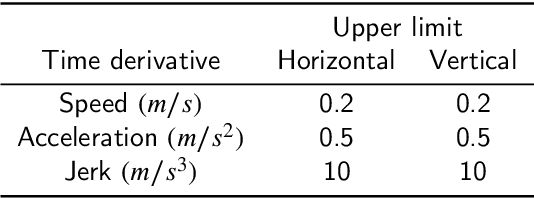

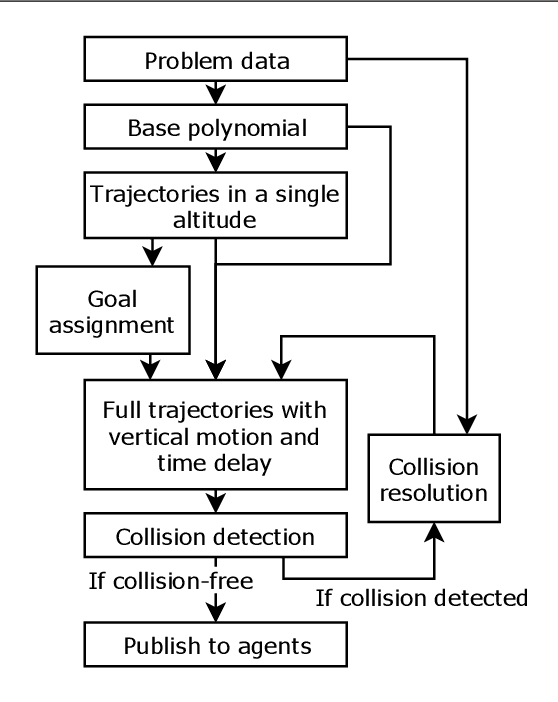
Computationally tractable methods are developed for centralized goal assignment and planning of collision-free polynomial-in-time trajectories for systems of multiple aerial robots. The method first assigns robots to goals to minimize total time-in-motion based on initial trajectories. By coupling the assignment and trajectory generation, the initial motion plans tend to require only limited collision resolution. The plans are then refined by checking for potential collisions and resolving them using either start time delays or altitude assignment. Numerical experiments using both methods show significant reductions in the total time required for agents to arrive at goals with only modest additional computational effort in comparison to state-of-the-art prior work, enabling planning for thousands of agents.
Approximate Midpoint Policy Iteration for Linear Quadratic Control
Nov 28, 2020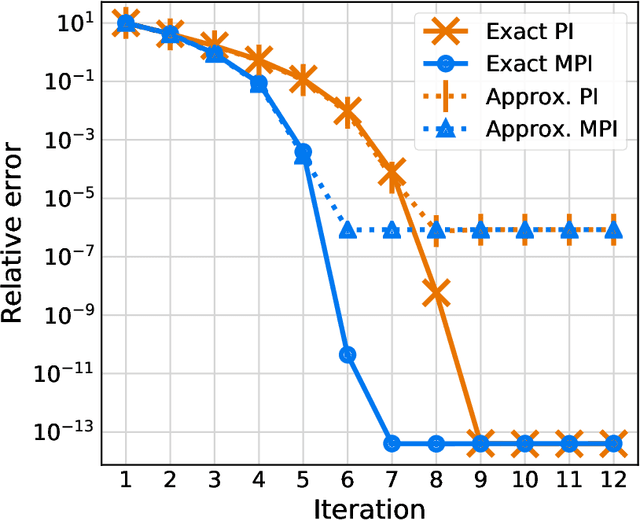

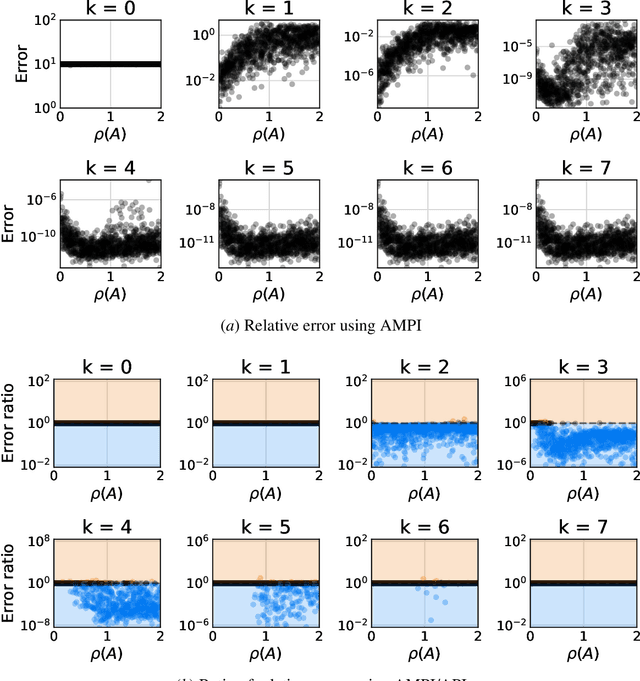
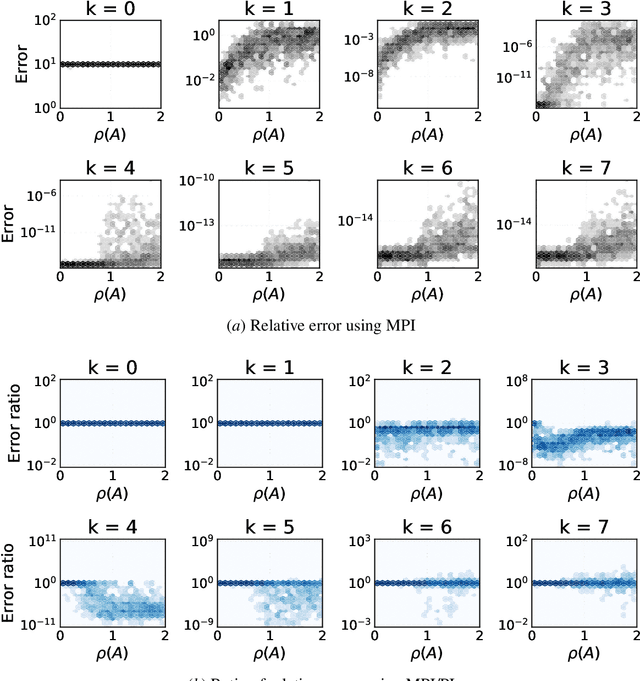
We present a midpoint policy iteration algorithm to solve linear quadratic optimal control problems in both model-based and model-free settings. The algorithm is a variation of Newton's method, and we show that in the model-based setting it achieves cubic convergence, which is superior to standard policy iteration and policy gradient algorithms that achieve quadratic and linear convergence, respectively. We also demonstrate that the algorithm can be approximately implemented without knowledge of the dynamics model by using least-squares estimates of the state-action value function from trajectory data, from which policy improvements can be obtained. With sufficient trajectory data, the policy iterates converge cubically to approximately optimal policies, and this occurs with the same available sample budget as the approximate standard policy iteration. Numerical experiments demonstrate effectiveness of the proposed algorithms.
Robust Learning-Based Control via Bootstrapped Multiplicative Noise
Feb 24, 2020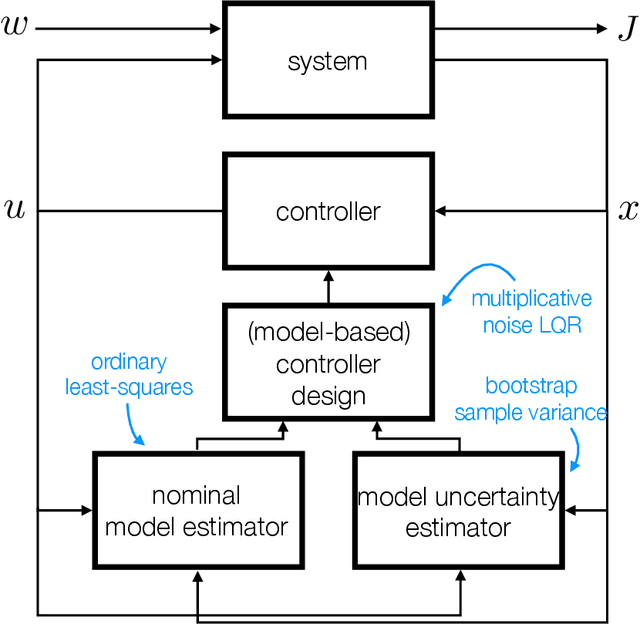

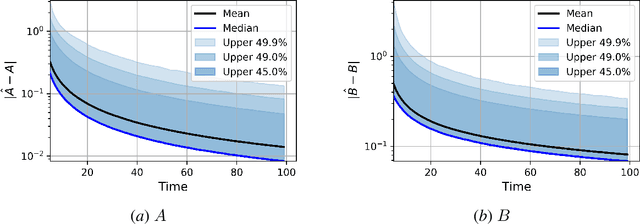
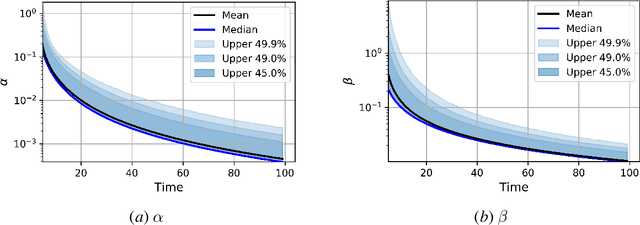
Despite decades of research and recent progress in adaptive control and reinforcement learning, there remains a fundamental lack of understanding in designing controllers that provide robustness to inherent non-asymptotic uncertainties arising from models estimated with finite, noisy data. We propose a robust adaptive control algorithm that explicitly incorporates such non-asymptotic uncertainties into the control design. The algorithm has three components: (1) a least-squares nominal model estimator; (2) a bootstrap resampling method that quantifies non-asymptotic variance of the nominal model estimate; and (3) a non-conventional robust control design method using an optimal linear quadratic regulator (LQR) with multiplicative noise. A key advantage of the proposed approach is that the system identification and robust control design procedures both use stochastic uncertainty representations, so that the actual inherent statistical estimation uncertainty directly aligns with the uncertainty the robust controller is being designed against. We show through numerical experiments that the proposed robust adaptive controller can significantly outperform the certainty equivalent controller on both expected regret and measures of regret risk.