 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Local Matches to Global Masks: Novel Instance Detection in Open-World Scenes
Mar 03, 2026Detecting and segmenting novel object instances in open-world environments is a fundamental problem in robotic perception. Given only a small set of template images, a robot must locate and segment a specific object instance in a cluttered, previously unseen scene. Existing proposal-based approaches are highly sensitive to proposal quality and often fail under occlusion and background clutter. We propose L2G-Det, a local-to-global instance detection framework that bypasses explicit object proposals by leveraging dense patch-level matching between templates and the query image. Locally matched patches generate candidate points, which are refined through a candidate selection module to suppress false positives. The filtered points are then used to prompt an augmented Segment Anything Model (SAM) with instance-specific object tokens, enabling reliable reconstruction of complete instance masks. Experiments demonstrate improved performance over proposal-based methods in challenging open-world settings.
Grasping Trajectory Optimization with Point Clouds
Mar 08, 2024



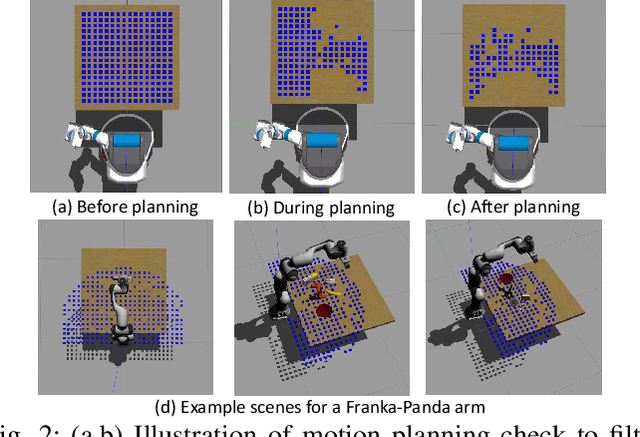
We introduce a new trajectory optimization method for robotic grasping based on a point-cloud representation of robots and task spaces. In our method, robots are represented by 3D points on their link surfaces. The task space of a robot is represented by a point cloud that can be obtained from depth sensors. Using the point-cloud representation, goal reaching in grasping can be formulated as point matching, while collision avoidance can be efficiently achieved by querying the signed distance values of the robot points in the signed distance field of the scene points. Consequently, a constrained non-linear optimization problem is formulated to solve the joint motion and grasp planning problem. The advantage of our method is that the point-cloud representation is general to be used with any robot in any environment. We demonstrate the effectiveness of our method by conducting experiments on a tabletop scene and a shelf scene for grasping with a Fetch mobile manipulator and a Franka Panda arm.
SCENEREPLICA: Benchmarking Real-World Robot Manipulation by Creating Reproducible Scenes
Jun 27, 2023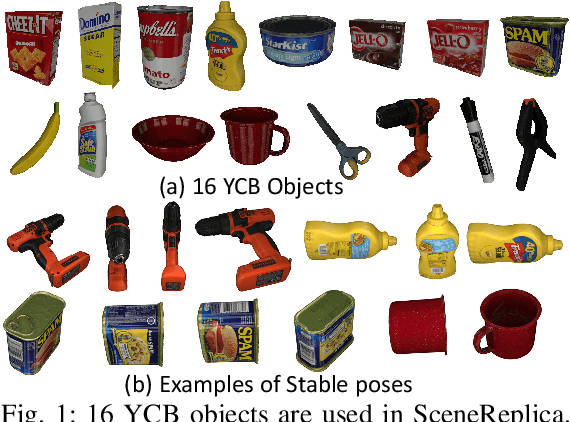
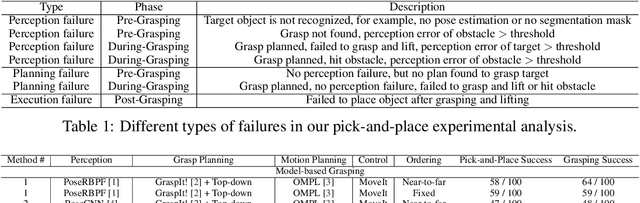
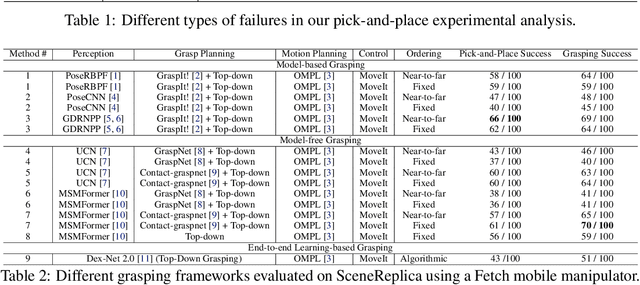
We present a new reproducible benchmark for evaluating robot manipulation in the real world, specifically focusing on pick-and-place. Our benchmark uses the YCB objects, a commonly used dataset in the robotics community, to ensure that our results are comparable to other studies. Additionally, the benchmark is designed to be easily reproducible in the real world, making it accessible to researchers and practitioners. We also provide our experimental results and analyzes for model-based and model-free 6D robotic grasping on the benchmark, where representative algorithms are evaluated for object perception, grasping planning, and motion planning. We believe that our benchmark will be a valuable tool for advancing the field of robot manipulation. By providing a standardized evaluation framework, researchers can more easily compare different techniques and algorithms, leading to faster progress in developing robot manipulation methods.