 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCertifying Robustness via Topological Representations
Jan 18, 2025



We propose a neural network architecture that can learn discriminative geometric representations of data from persistence diagrams, common descriptors of Topological Data Analysis. The learned representations enjoy Lipschitz stability with a controllable Lipschitz constant. In adversarial learning, this stability can be used to certify $\epsilon$-robustness for samples in a dataset, which we demonstrate on the ORBIT5K dataset representing the orbits of a discrete dynamical system.
PAGE-PG: A Simple and Loopless Variance-Reduced Policy Gradient Method with Probabilistic Gradient Estimation
Feb 01, 2022

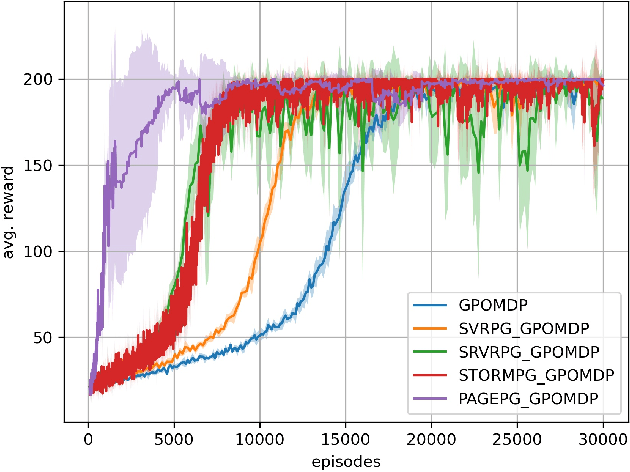
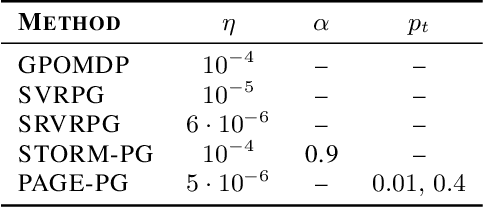
Despite their success, policy gradient methods suffer from high variance of the gradient estimate, which can result in unsatisfactory sample complexity. Recently, numerous variance-reduced extensions of policy gradient methods with provably better sample complexity and competitive numerical performance have been proposed. After a compact survey on some of the main variance-reduced REINFORCE-type methods, we propose ProbAbilistic Gradient Estimation for Policy Gradient (PAGE-PG), a novel loopless variance-reduced policy gradient method based on a probabilistic switch between two types of updates. Our method is inspired by the PAGE estimator for supervised learning and leverages importance sampling to obtain an unbiased gradient estimator. We show that PAGE-PG enjoys a $\mathcal{O}\left( \epsilon^{-3} \right)$ average sample complexity to reach an $\epsilon$-stationary solution, which matches the sample complexity of its most competitive counterparts under the same setting. A numerical evaluation confirms the competitive performance of our method on classical control tasks.