 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Agent Goal Assignment with Finite-Time Path Planning
Dec 24, 2022



Minimising the longest travel distance for a group of mobile robots with interchangeable goals requires knowledge of the shortest length paths between all robots and goal destinations. Determining the exact length of the shortest paths in an environment with obstacles is challenging and cannot be guaranteed in a finite time. We propose an algorithm in which the accuracy of the path planning is iteratively increased. The approach provides a certificate when the uncertainties on estimates of the shortest paths become small enough to guarantee the optimality of the goal assignment. To this end, we apply results from assignment sensitivity assuming upper and lower bounds on the length of the shortest paths. We then provide polynomial-time methods to find such bounds by applying sampling-based path planning. The upper bounds are given by feasible paths, the lower bounds are obtained by expanding the sample set and leveraging knowledge of the sample dispersion. We demonstrate the application of the proposed method with a multi-robot path-planning case study.
Probabilistic Data Association for Semantic SLAM at Scale
Feb 25, 2022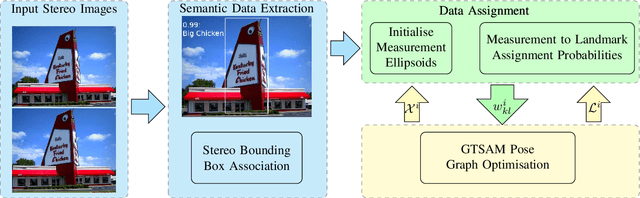
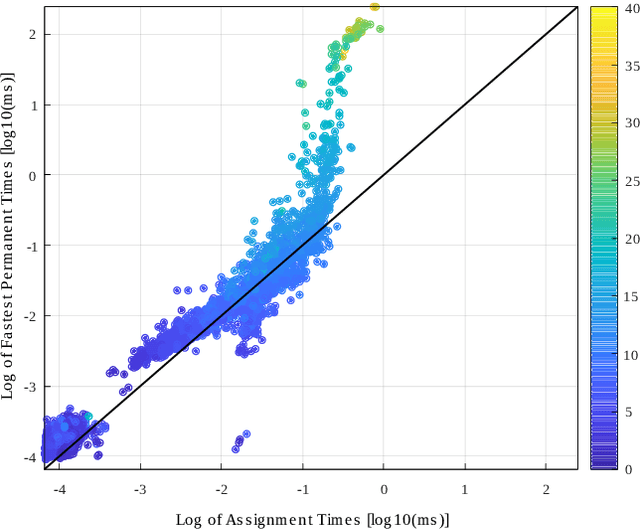
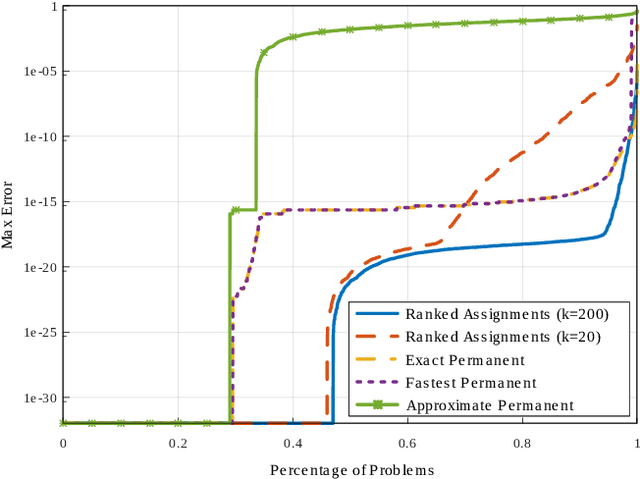
With advances in image processing and machine learning, it is now feasible to incorporate semantic information into the problem of simultaneous localisation and mapping (SLAM). Previously, SLAM was carried out using lower level geometric features (points, lines, and planes) which are often view-point dependent and error prone in visually repetitive environments. Semantic information can improve the ability to recognise previously visited locations, as well as maintain sparser maps for long term SLAM applications. However, SLAM in repetitive environments has the critical problem of assigning measurements to the landmarks which generated them. In this paper, we use k-best assignment enumeration to compute marginal assignment probabilities for each measurement landmark pair, in real time. We present numerical studies on the KITTI dataset to demonstrate the effectiveness and speed of the proposed framework.