 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeZORMS-LfD: Learning from Demonstrations with Zeroth-Order Random Matrix Search
Jul 23, 2025We propose Zeroth-Order Random Matrix Search for Learning from Demonstrations (ZORMS-LfD). ZORMS-LfD enables the costs, constraints, and dynamics of constrained optimal control problems, in both continuous and discrete time, to be learned from expert demonstrations without requiring smoothness of the learning-loss landscape. In contrast, existing state-of-the-art first-order methods require the existence and computation of gradients of the costs, constraints, dynamics, and learning loss with respect to states, controls and/or parameters. Most existing methods are also tailored to discrete time, with constrained problems in continuous time receiving only cursory attention. We demonstrate that ZORMS-LfD matches or surpasses the performance of state-of-the-art methods in terms of both learning loss and compute time across a variety of benchmark problems. On unconstrained continuous-time benchmark problems, ZORMS-LfD achieves similar loss performance to state-of-the-art first-order methods with an over $80$\% reduction in compute time. On constrained continuous-time benchmark problems where there is no specialized state-of-the-art method, ZORMS-LfD is shown to outperform the commonly used gradient-free Nelder-Mead optimization method.
Regret Analysis of Online LQR Control via Trajectory Prediction and Tracking: Extended Version
Feb 21, 2023In this paper, we propose and analyze a new method for online linear quadratic regulator (LQR) control with a priori unknown time-varying cost matrices. The cost matrices are revealed sequentially with the potential for future values to be previewed over a short window. Our novel method involves using the available cost matrices to predict the optimal trajectory, and a tracking controller to drive the system towards it. We adopted the notion of dynamic regret to measure the performance of this proposed online LQR control method, with our main result being that the (dynamic) regret of our method is upper bounded by a constant. Moreover, the regret upper bound decays exponentially with the preview window length, and is extendable to systems with disturbances. We show in simulations that our proposed method offers improved performance compared to other previously proposed online LQR methods.
Entropy-Regularized Partially Observed Markov Decision Processes
Dec 22, 2021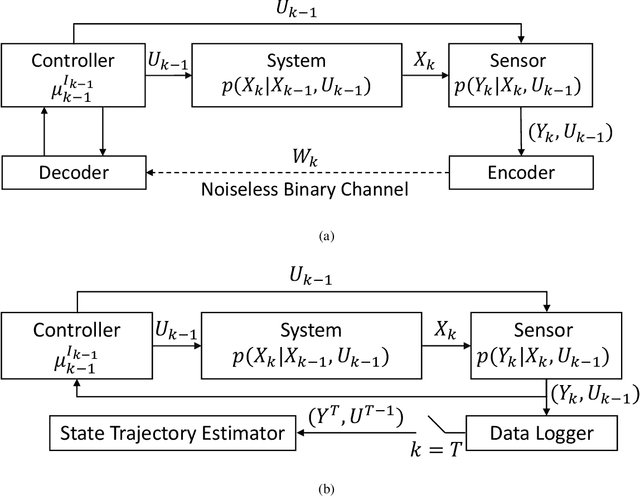
We investigate partially observed Markov decision processes (POMDPs) with cost functions regularized by entropy terms describing state, observation, and control uncertainty. Standard POMDP techniques are shown to offer bounded-error solutions to these entropy-regularized POMDPs, with exact solutions when the regularization involves the joint entropy of the state, observation, and control trajectories. Our joint-entropy result is particularly surprising since it constitutes a novel, tractable formulation of active state estimation.
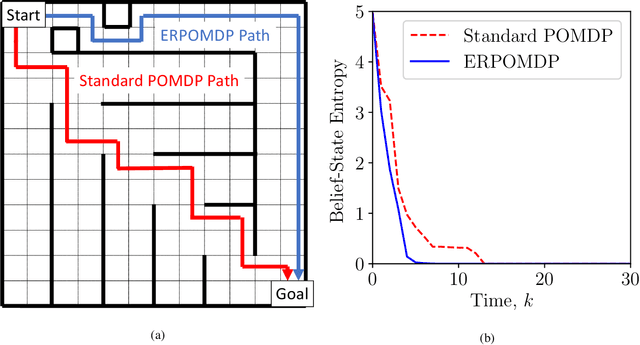
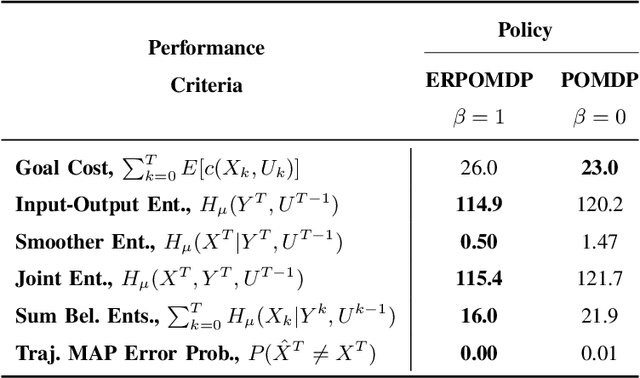
Smoother Entropy for Active State Trajectory Estimation and Obfuscation in POMDPs
Aug 19, 2021



We study the problem of controlling a partially observed Markov decision process (POMDP) to either aid or hinder the estimation of its state trajectory by optimising the conditional entropy of the state trajectory given measurements and controls, a quantity we dub the smoother entropy. Our consideration of the smoother entropy contrasts with previous active state estimation and obfuscation approaches that instead resort to measures of marginal (or instantaneous) state uncertainty due to tractability concerns. By establishing novel expressions of the smoother entropy in terms of the usual POMDP belief state, we show that our active estimation and obfuscation problems can be reformulated as Markov decision processes (MDPs) that are fully observed in the belief state. Surprisingly, we identify belief-state MDP reformulations of both active estimation and obfuscation with concave cost and cost-to-go functions, which enables the use of standard POMDP techniques to construct tractable bounded-error (approximate) solutions. We show in simulations that optimisation of the smoother entropy leads to superior trajectory estimation and obfuscation compared to alternative approaches.
Intelligent Reference Curation for Visual Place Recognition via Bayesian Selective Fusion
Oct 19, 2020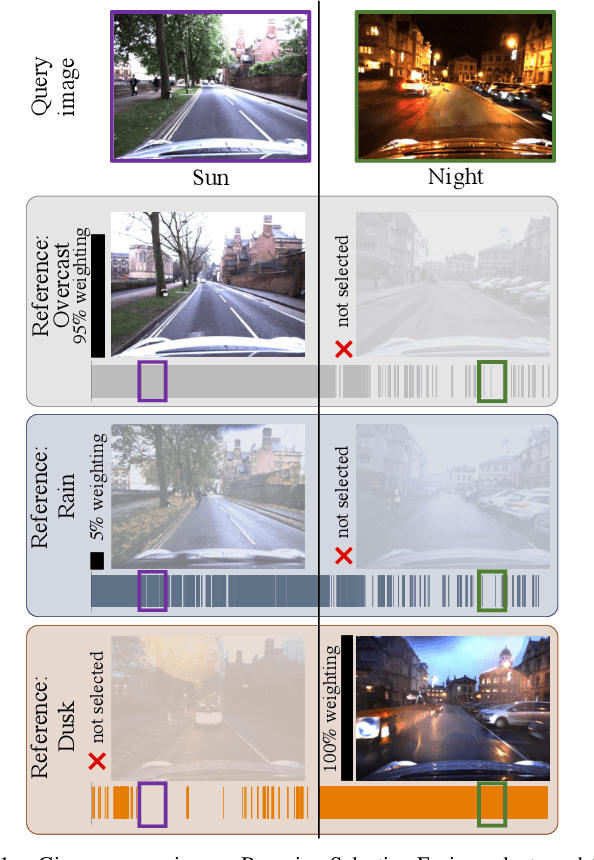

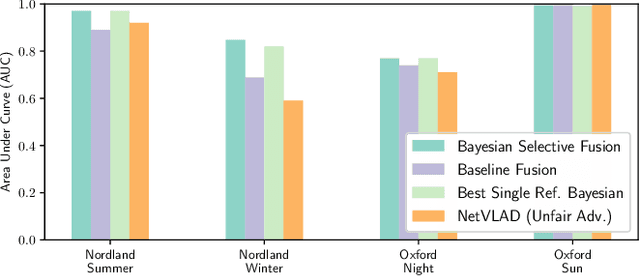
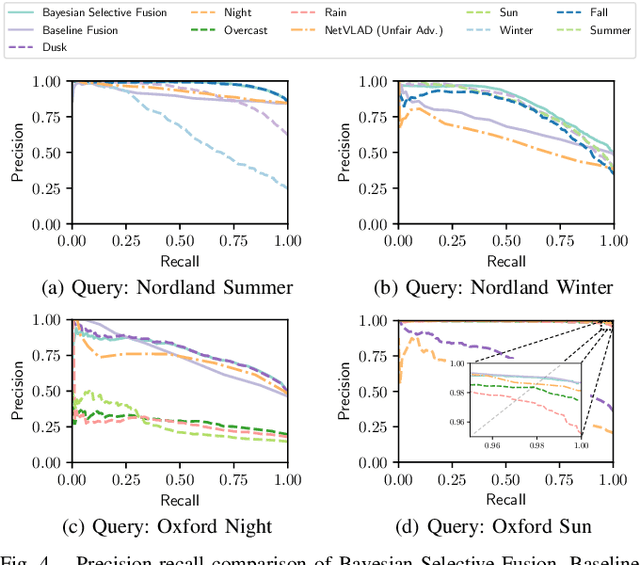
The key challenge of visual place recognition (VPR) lies in recognizing places despite drastic visual appearance changes due to factors such as time of day, season, or weather or lighting conditions. Numerous approaches based on deep-learnt image descriptors, sequence matching, domain translation, and probabilistic localization have had success in addressing this challenge, but most rely on the availability of carefully curated representative reference images of the possible places. In this paper, we propose a novel approach, dubbed Bayesian Selective Fusion, for actively selecting and fusing informative reference images to determine the best place match for a given query image. The selective element of our approach avoids the counterproductive fusion of every reference image and enables the dynamic selection of informative reference images in environments with changing visual conditions (such as indoors with flickering lights, outdoors during sunshowers or over the day-night cycle). The probabilistic element of our approach provides a means of fusing multiple reference images that accounts for their varying uncertainty via a novel training-free likelihood function for VPR. On difficult query images from two benchmark datasets, we demonstrate that our approach matches and exceeds the performance of several alternative fusion approaches along with state-of-the-art techniques that are provided with a priori (unfair) knowledge of the best reference images. Our approach is well suited for long-term robot autonomy where dynamic visual environments are commonplace since it is training-free, descriptor-agnostic, and complements existing techniques such as sequence matching.
Below Horizon Aircraft Detection Using Deep Learning for Vision-Based Sense and Avoid
Mar 08, 2019



Commercial operation of unmanned aerial vehicles (UAVs) would benefit from an onboard ability to sense and avoid (SAA) potential mid-air collision threats. In this paper we present a new approach for detection of aircraft below the horizon. We address some of the challenges faced by existing vision-based SAA methods such as detecting stationary aircraft (that have no relative motion to the background), rejecting moving ground vehicles, and simultaneous detection of multiple aircraft. We propose a multi-stage, vision-based aircraft detection system which utilises deep learning to produce candidate aircraft that we track over time. We evaluate the performance of our proposed system on real flight data where we demonstrate detection ranges comparable to the state of the art with the additional capability of detecting stationary aircraft, rejecting moving ground vehicles, and tracking multiple aircraft.