 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnsupervised Quality Prediction for Improved Single-Frame and Weighted Sequential Visual Place Recognition
Jul 04, 2023



While substantial progress has been made in the absolute performance of localization and Visual Place Recognition (VPR) techniques, it is becoming increasingly clear from translating these systems into applications that other capabilities like integrity and predictability are just as important, especially for safety- or operationally-critical autonomous systems. In this research we present a new, training-free approach to predicting the likely quality of localization estimates, and a novel method for using these predictions to bias a sequence-matching process to produce additional performance gains beyond that of a naive sequence matching approach. Our combined system is lightweight, runs in real-time and is agnostic to the underlying VPR technique. On extensive experiments across four datasets and three VPR techniques, we demonstrate our system improves precision performance, especially at the high-precision/low-recall operating point. We also present ablation and analysis identifying the performance contributions of the prediction and weighted sequence matching components in isolation, and the relationship between the quality of the prediction system and the benefits of the weighted sequential matcher.
Bayesian Quickest Change Detection of an Intruder in Acknowledgments for Private Remote State Estimation
Jul 18, 2022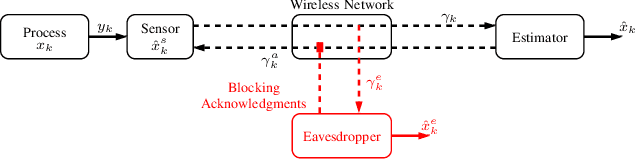
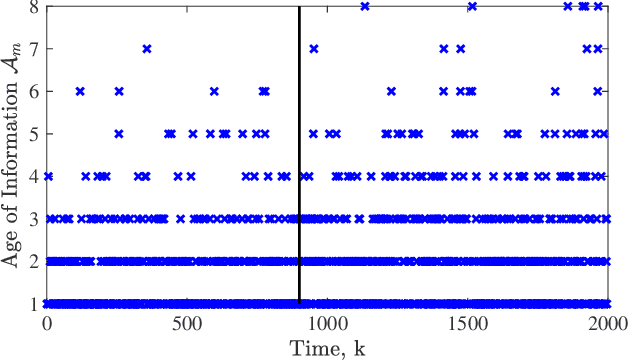


For geographically separated cyber-physical systems, state estimation at a remote monitoring or control site is important to ensure stability and reliability of the system. Often for safety or commercial reasons it is necessary to ensure confidentiality of the process state and control information. A current topic of interest is the private transmission of confidential state information. Many transmission encoding schemes rely on acknowledgments, which may be susceptible to interference from an adversary. We consider a stealthy intruder that selectively blocks acknowledgments allowing an eavesdropper to obtain a reliable state estimate defeating an encoding scheme. We utilize Bayesian Quickest Change Detection techniques to quickly detect online the presence of an intruder at both the remote transmitter and receiver.
A Dataset of Stationary, Fixed-wing Aircraft on a Collision Course for Vision-Based Sense and Avoid
Dec 06, 2021
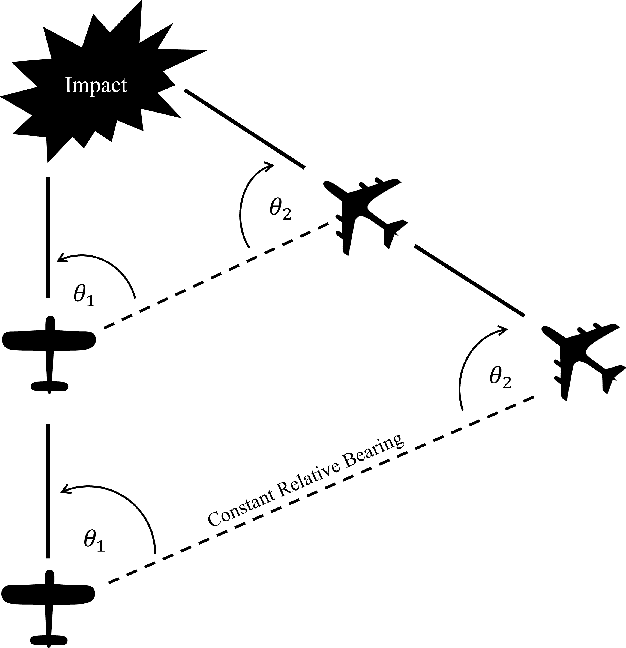
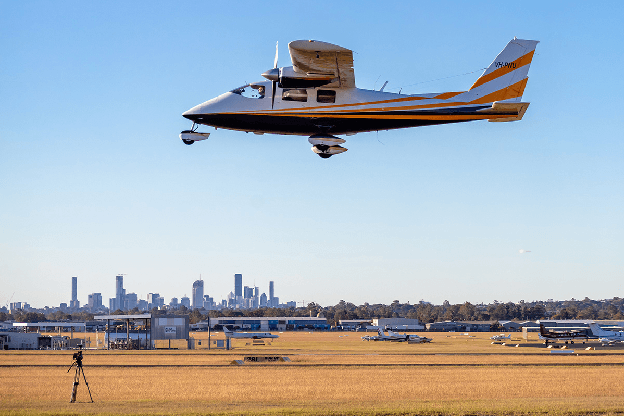
The emerging global market for unmanned aerial vehicle (UAV) services is anticipated to reach USD 58.4 billion by 2026, spurring significant efforts to safely integrate routine UAV operations into the national airspace in a manner that they do not compromise the existing safety levels. The commercial use of UAVs would be enhanced by an ability to sense and avoid potential mid-air collision threats however research in this field is hindered by the lack of available datasets as they are expensive and technically complex to capture. In this paper we present a dataset for vision based aircraft detection. The dataset consists of 15 image sequences containing 55,521 images of a fixed-wing aircraft approaching a stationary, grounded camera. Ground truth labels and a performance benchmark are also provided. To our knowledge, this is the first public dataset for studying medium sized, fixed-wing aircraft on a collision course with the observer. The full dataset and ground truth labels are publicly available at https://qcr.github.io/dataset/aircraft-collision-course/.
Below Horizon Aircraft Detection Using Deep Learning for Vision-Based Sense and Avoid
Mar 08, 2019



Commercial operation of unmanned aerial vehicles (UAVs) would benefit from an onboard ability to sense and avoid (SAA) potential mid-air collision threats. In this paper we present a new approach for detection of aircraft below the horizon. We address some of the challenges faced by existing vision-based SAA methods such as detecting stationary aircraft (that have no relative motion to the background), rejecting moving ground vehicles, and simultaneous detection of multiple aircraft. We propose a multi-stage, vision-based aircraft detection system which utilises deep learning to produce candidate aircraft that we track over time. We evaluate the performance of our proposed system on real flight data where we demonstrate detection ranges comparable to the state of the art with the additional capability of detecting stationary aircraft, rejecting moving ground vehicles, and tracking multiple aircraft.