 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving Visual Place Recognition Based Robot Navigation Through Verification of Localization Estimates
Jul 11, 2024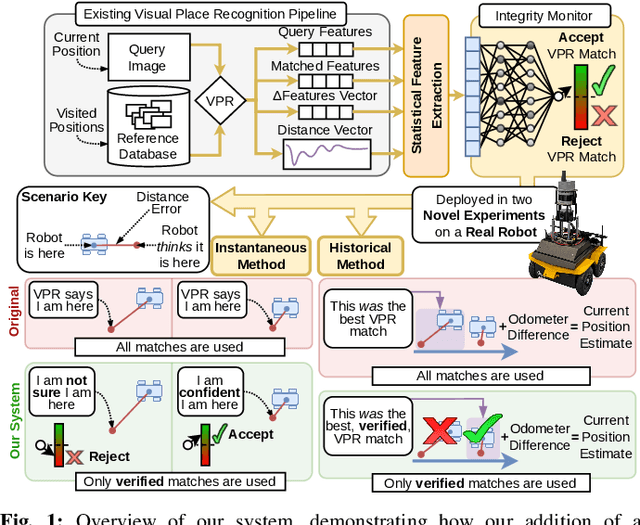
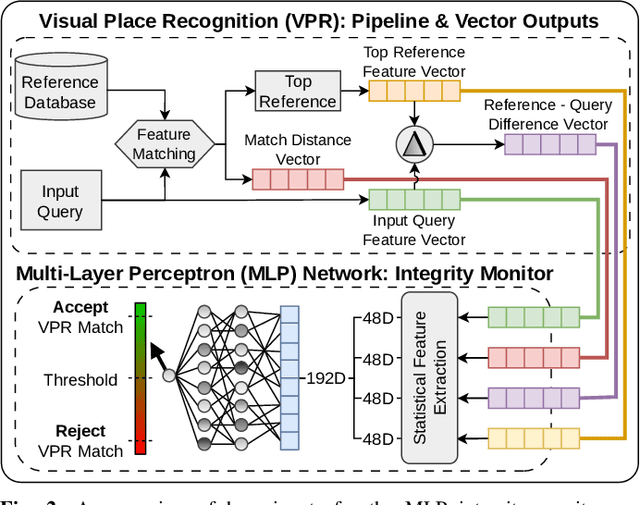
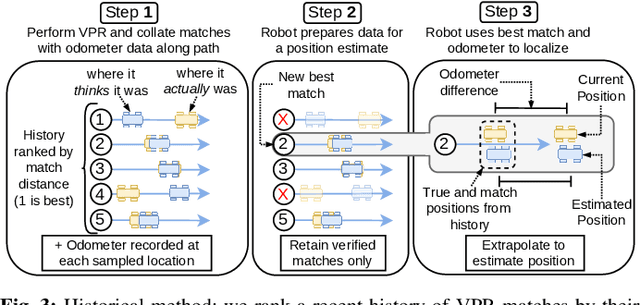
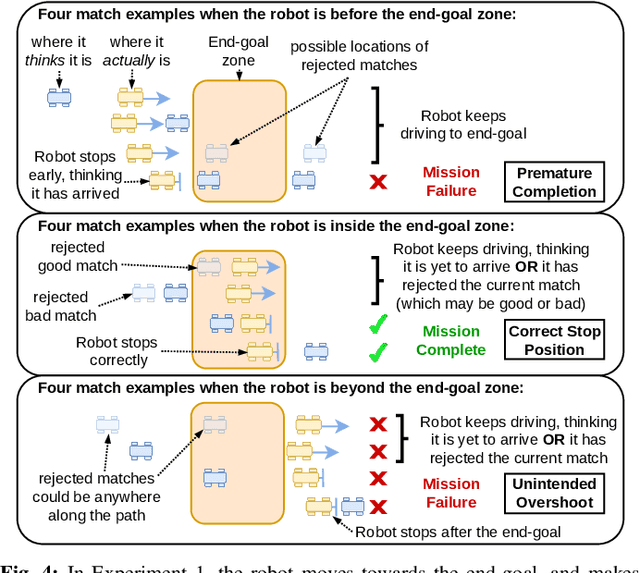
Visual Place Recognition (VPR) systems often have imperfect performance, which affects robot navigation decisions. This research introduces a novel Multi-Layer Perceptron (MLP) integrity monitor for VPR which demonstrates improved performance and generalizability over the previous state-of-the-art SVM approach, removing per-environment training and reducing manual tuning requirements. We test our proposed system in extensive real-world experiments, where we also present two real-time integrity-based VPR verification methods: an instantaneous rejection method for a robot navigating to a goal zone (Experiment 1); and a historical method that takes a best, verified, match from its recent trajectory and uses an odometer to extrapolate forwards to a current position estimate (Experiment 2). Noteworthy results for Experiment 1 include a decrease in aggregate mean along-track goal error from ~9.8m to ~3.1m in missions the robot pursued to completion, and an increase in the aggregate rate of successful mission completion from ~41% to ~55%. Experiment 2 showed a decrease in aggregate mean along-track localization error from ~2.0m to ~0.5m, and an increase in the aggregate precision of localization attempts from ~97% to ~99%. Overall, our results demonstrate the practical usefulness of a VPR integrity monitor in real-world robotics to improve VPR localization and consequent navigation performance.
Unsupervised Quality Prediction for Improved Single-Frame and Weighted Sequential Visual Place Recognition
Jul 04, 2023



While substantial progress has been made in the absolute performance of localization and Visual Place Recognition (VPR) techniques, it is becoming increasingly clear from translating these systems into applications that other capabilities like integrity and predictability are just as important, especially for safety- or operationally-critical autonomous systems. In this research we present a new, training-free approach to predicting the likely quality of localization estimates, and a novel method for using these predictions to bias a sequence-matching process to produce additional performance gains beyond that of a naive sequence matching approach. Our combined system is lightweight, runs in real-time and is agnostic to the underlying VPR technique. On extensive experiments across four datasets and three VPR techniques, we demonstrate our system improves precision performance, especially at the high-precision/low-recall operating point. We also present ablation and analysis identifying the performance contributions of the prediction and weighted sequence matching components in isolation, and the relationship between the quality of the prediction system and the benefits of the weighted sequential matcher.