 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving Visual Place Recognition Based Robot Navigation Through Verification of Localization Estimates
Jul 11, 2024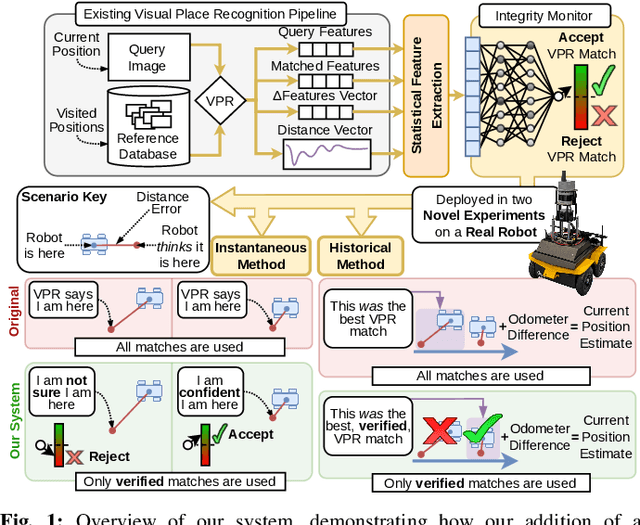
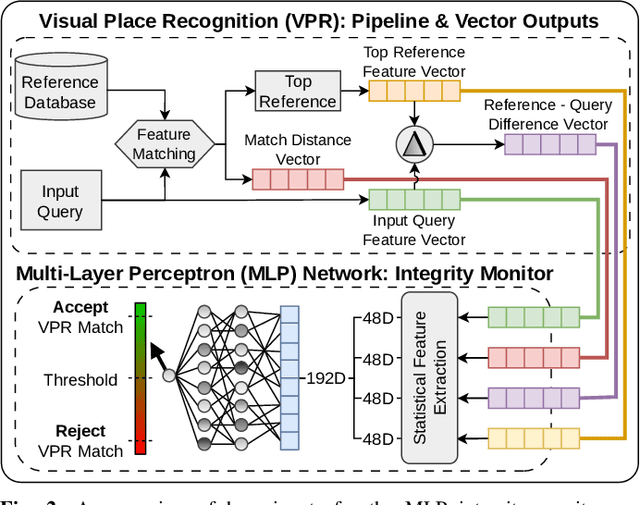
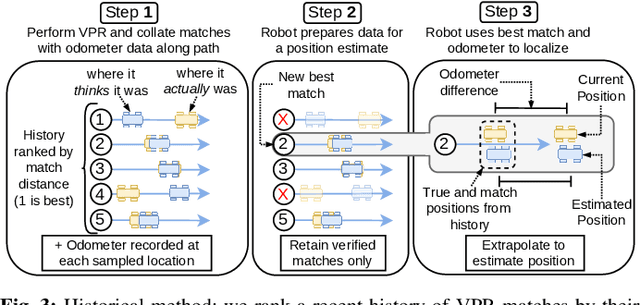
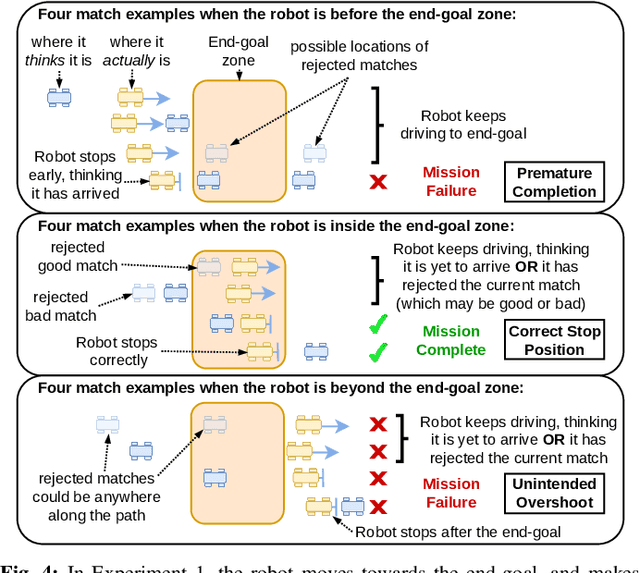
Visual Place Recognition (VPR) systems often have imperfect performance, which affects robot navigation decisions. This research introduces a novel Multi-Layer Perceptron (MLP) integrity monitor for VPR which demonstrates improved performance and generalizability over the previous state-of-the-art SVM approach, removing per-environment training and reducing manual tuning requirements. We test our proposed system in extensive real-world experiments, where we also present two real-time integrity-based VPR verification methods: an instantaneous rejection method for a robot navigating to a goal zone (Experiment 1); and a historical method that takes a best, verified, match from its recent trajectory and uses an odometer to extrapolate forwards to a current position estimate (Experiment 2). Noteworthy results for Experiment 1 include a decrease in aggregate mean along-track goal error from ~9.8m to ~3.1m in missions the robot pursued to completion, and an increase in the aggregate rate of successful mission completion from ~41% to ~55%. Experiment 2 showed a decrease in aggregate mean along-track localization error from ~2.0m to ~0.5m, and an increase in the aggregate precision of localization attempts from ~97% to ~99%. Overall, our results demonstrate the practical usefulness of a VPR integrity monitor in real-world robotics to improve VPR localization and consequent navigation performance.
Assisted Control for Semi-Autonomous Power Infrastructure Inspection using Aerial Vehicles
Aug 01, 2018
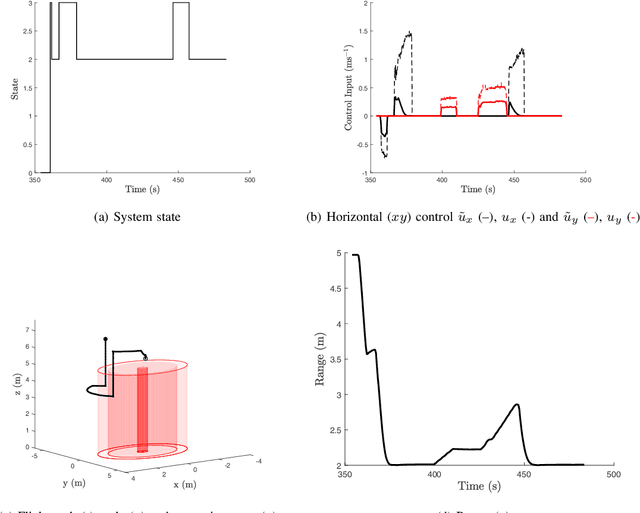
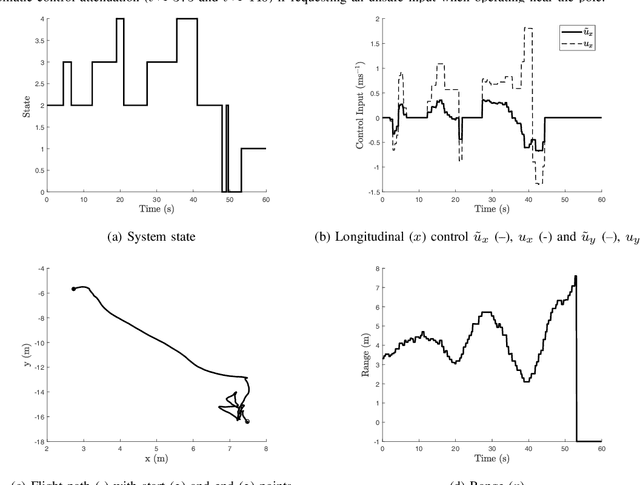
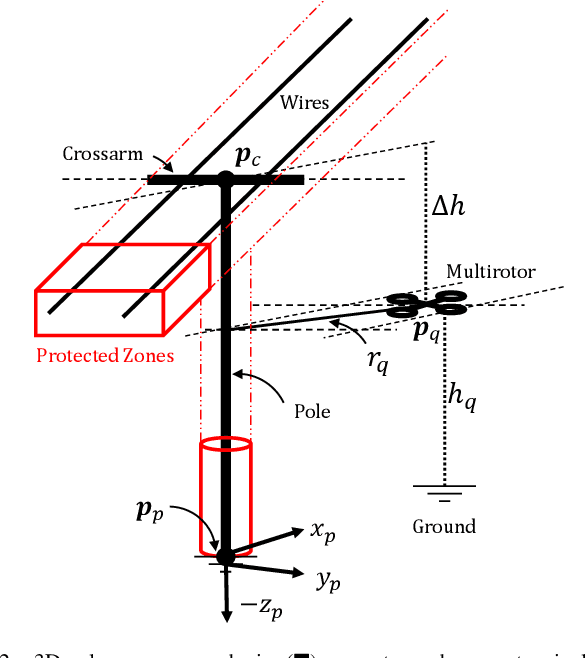
This paper presents the design and implementation of an assisted control technology for a small multirotor platform for aerial inspection of fixed energy infrastructure. Sensor placement is supported by a theoretical analysis of expected sensor performance and constrained platform behaviour to speed up implementation. The optical sensors provide relative position information between the platform and the asset, which enables human operator inputs to be autonomously adjusted to ensure safe separation. The assisted control approach is designed to reduced operator workload during close proximity inspection tasks, with collision avoidance and safe separation managed autonomously. The energy infrastructure includes single vertical wooden poles and crossarm with attached overhead wires. Simulated and real experimental results are provided.