 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAssisted Control for Semi-Autonomous Power Infrastructure Inspection using Aerial Vehicles
Aug 01, 2018
This paper presents the design and implementation of an assisted control technology for a small multirotor platform for aerial inspection of fixed energy infrastructure. Sensor placement is supported by a theoretical analysis of expected sensor performance and constrained platform behaviour to speed up implementation. The optical sensors provide relative position information between the platform and the asset, which enables human operator inputs to be autonomously adjusted to ensure safe separation. The assisted control approach is designed to reduced operator workload during close proximity inspection tasks, with collision avoidance and safe separation managed autonomously. The energy infrastructure includes single vertical wooden poles and crossarm with attached overhead wires. Simulated and real experimental results are provided.
Mirrored Light Field Video Camera Adapter
Dec 16, 2016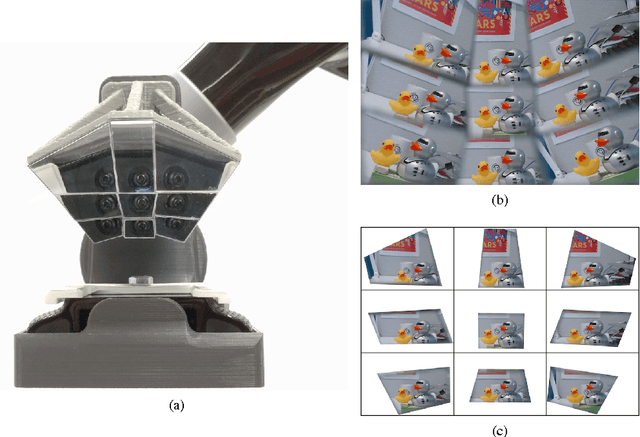
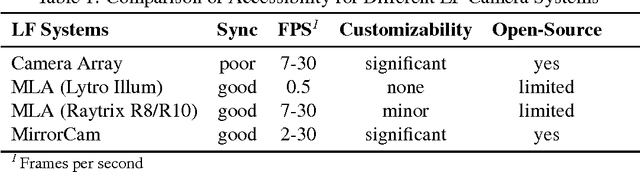
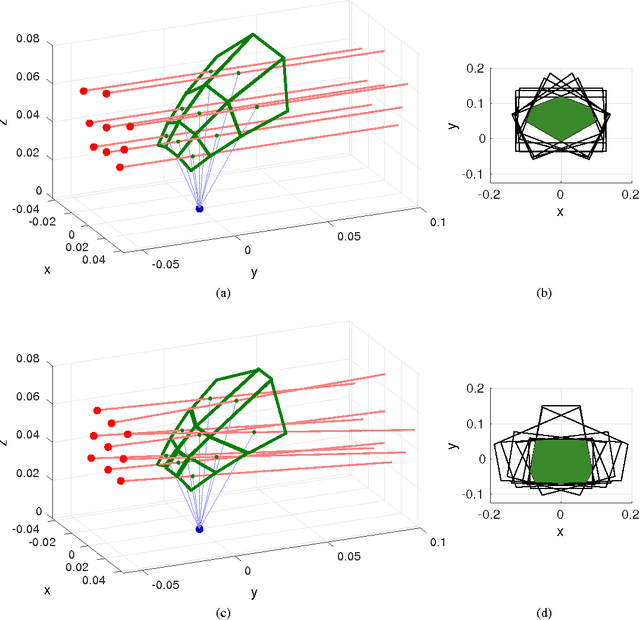

This paper proposes the design of a custom mirror-based light field camera adapter that is cheap, simple in construction, and accessible. Mirrors of different shape and orientation reflect the scene into an upwards-facing camera to create an array of virtual cameras with overlapping field of view at specified depths, and deliver video frame rate light fields. We describe the design, construction, decoding and calibration processes of our mirror-based light field camera adapter in preparation for an open-source release to benefit the robotic vision community.