 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntelligent Reference Curation for Visual Place Recognition via Bayesian Selective Fusion
Paper and Code
Oct 19, 2020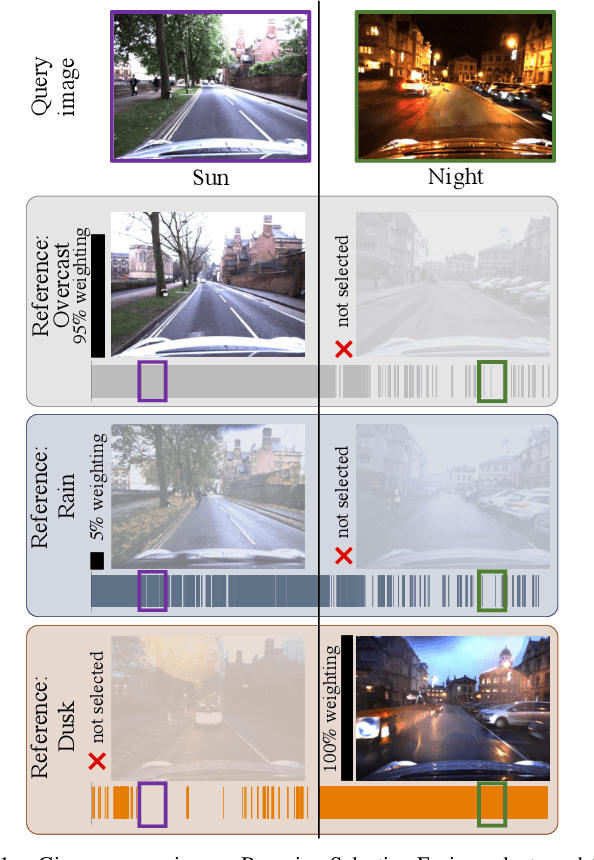

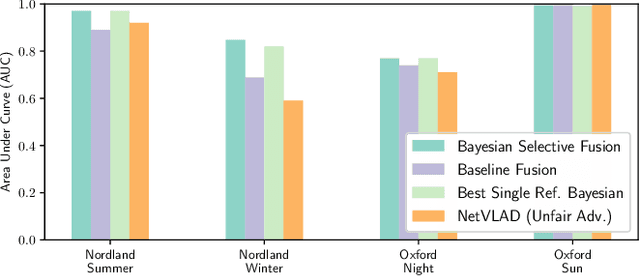
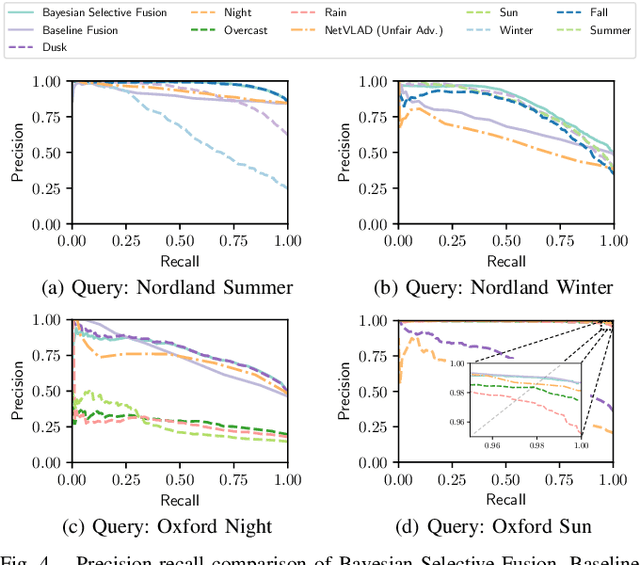
The key challenge of visual place recognition (VPR) lies in recognizing places despite drastic visual appearance changes due to factors such as time of day, season, or weather or lighting conditions. Numerous approaches based on deep-learnt image descriptors, sequence matching, domain translation, and probabilistic localization have had success in addressing this challenge, but most rely on the availability of carefully curated representative reference images of the possible places. In this paper, we propose a novel approach, dubbed Bayesian Selective Fusion, for actively selecting and fusing informative reference images to determine the best place match for a given query image. The selective element of our approach avoids the counterproductive fusion of every reference image and enables the dynamic selection of informative reference images in environments with changing visual conditions (such as indoors with flickering lights, outdoors during sunshowers or over the day-night cycle). The probabilistic element of our approach provides a means of fusing multiple reference images that accounts for their varying uncertainty via a novel training-free likelihood function for VPR. On difficult query images from two benchmark datasets, we demonstrate that our approach matches and exceeds the performance of several alternative fusion approaches along with state-of-the-art techniques that are provided with a priori (unfair) knowledge of the best reference images. Our approach is well suited for long-term robot autonomy where dynamic visual environments are commonplace since it is training-free, descriptor-agnostic, and complements existing techniques such as sequence matching.