Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEntropy-Regularized Partially Observed Markov Decision Processes
Paper and Code
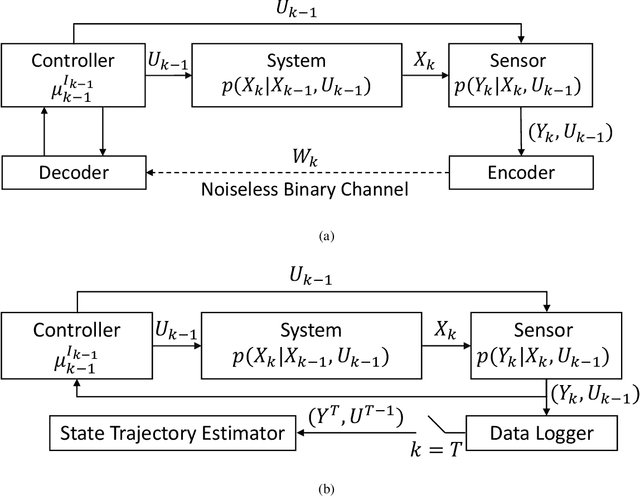
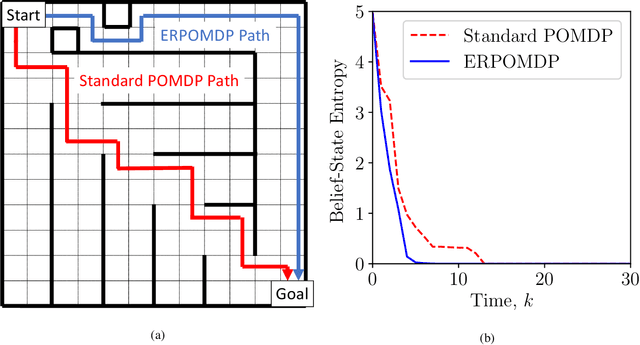
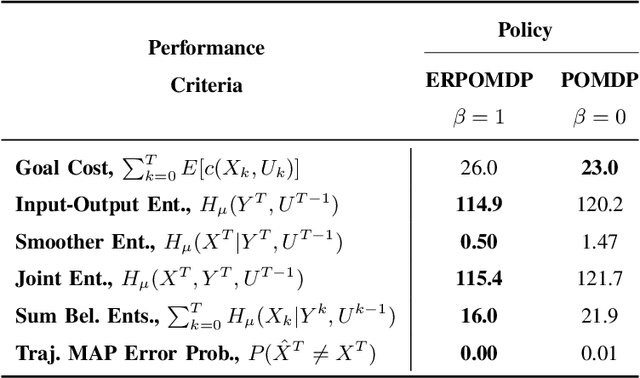
We investigate partially observed Markov decision processes (POMDPs) with cost functions regularized by entropy terms describing state, observation, and control uncertainty. Standard POMDP techniques are shown to offer bounded-error solutions to these entropy-regularized POMDPs, with exact solutions when the regularization involves the joint entropy of the state, observation, and control trajectories. Our joint-entropy result is particularly surprising since it constitutes a novel, tractable formulation of active state estimation.
* 20 pages, 2 figures, submitted
View paper on